ArduPilot开源飞控之飞行模式
- 1. 源由
- 2. 飞行模式-已实现
- 3. 飞行模式-设计
- 3.1 模式初始化(`init`)
- 3.2 模式退出(`exit`)
- 3.3 模式任务(`run`)
- 3.4 模式切换场景
- 3.4.1 上电初始化
- 3.4.2 `EKF FAILSAFE`触发
- 3.4.3 `do_failsafe_action FAILSAFE`触发
- 3.4.4 `AP_Avoidance_Copter`触发
- 3.4.5 Crash触发
- 3.4.6 围栏设置触发
- 3.4.7 RC遥控触发
- 3.4.8 MAVLink触发
- 3.4.9 飞行模式内部逻辑触发
- 3.4.10 heli触发
- 3.4.11 MavLink_FrSkySPort
- 4. 新增飞行模式
- Step 1:新增模式名称
- Step 2:定义基本接口
- Step 3:补充基本接口实现
- Step 4:添加类实例
- Step 5:添加模式映射
- Step 6:设置默认飞行模式
- Step 7:地面站配置参数修改
- 5. 总结
- 6. 参考资料
1. 源由
ArduPilot开源飞控有各种飞行模式,比如:stablize/acro/auto/guided 等等。基于这些飞行模式,用户可以根据需要选择合适的飞行计划。
- 花飞、竞速:可以直接采用acro手动模式
- 任务、航点:可以选择auto飞行模式
- 异常情况:可以选择诸如RTL飞行模式,自动返航
- 等等
本章节将会针对飞行模式来整理下ArduPilot在飞行模式上的强大功能,以及整合用户自定义的步骤。
2. 飞行模式-已实现
多旋翼飞行器ArduPilot已经实现的飞行模式如下所述:
// Auto Pilot Modes enumeration
enum class Number : uint8_t {
STABILIZE = 0, // manual airframe angle with manual throttle
ACRO = 1, // manual body-frame angular rate with manual throttle
ALT_HOLD = 2, // manual airframe angle with automatic throttle
AUTO = 3, // fully automatic waypoint control using mission commands
GUIDED = 4, // fully automatic fly to coordinate or fly at velocity/direction using GCS immediate commands
LOITER = 5, // automatic horizontal acceleration with automatic throttle
RTL = 6, // automatic return to launching point
CIRCLE = 7, // automatic circular flight with automatic throttle
LAND = 9, // automatic landing with horizontal position control
DRIFT = 11, // semi-autonomous position, yaw and throttle control
SPORT = 13, // manual earth-frame angular rate control with manual throttle
FLIP = 14, // automatically flip the vehicle on the roll axis
AUTOTUNE = 15, // automatically tune the vehicle's roll and pitch gains
POSHOLD = 16, // automatic position hold with manual override, with automatic throttle
BRAKE = 17, // full-brake using inertial/GPS system, no pilot input
THROW = 18, // throw to launch mode using inertial/GPS system, no pilot input
AVOID_ADSB = 19, // automatic avoidance of obstacles in the macro scale - e.g. full-sized aircraft
GUIDED_NOGPS = 20, // guided mode but only accepts attitude and altitude
SMART_RTL = 21, // SMART_RTL returns to home by retracing its steps
FLOWHOLD = 22, // FLOWHOLD holds position with optical flow without rangefinder
FOLLOW = 23, // follow attempts to follow another vehicle or ground station
ZIGZAG = 24, // ZIGZAG mode is able to fly in a zigzag manner with predefined point A and point B
SYSTEMID = 25, // System ID mode produces automated system identification signals in the controllers
AUTOROTATE = 26, // Autonomous autorotation
AUTO_RTL = 27, // Auto RTL, this is not a true mode, AUTO will report as this mode if entered to perform a DO_LAND_START Landing sequence
TURTLE = 28, // Flip over after crash
// Mode number 127 reserved for the "drone show mode" in the Skybrush
// fork at https://github.com/skybrush-io/ardupilot
};
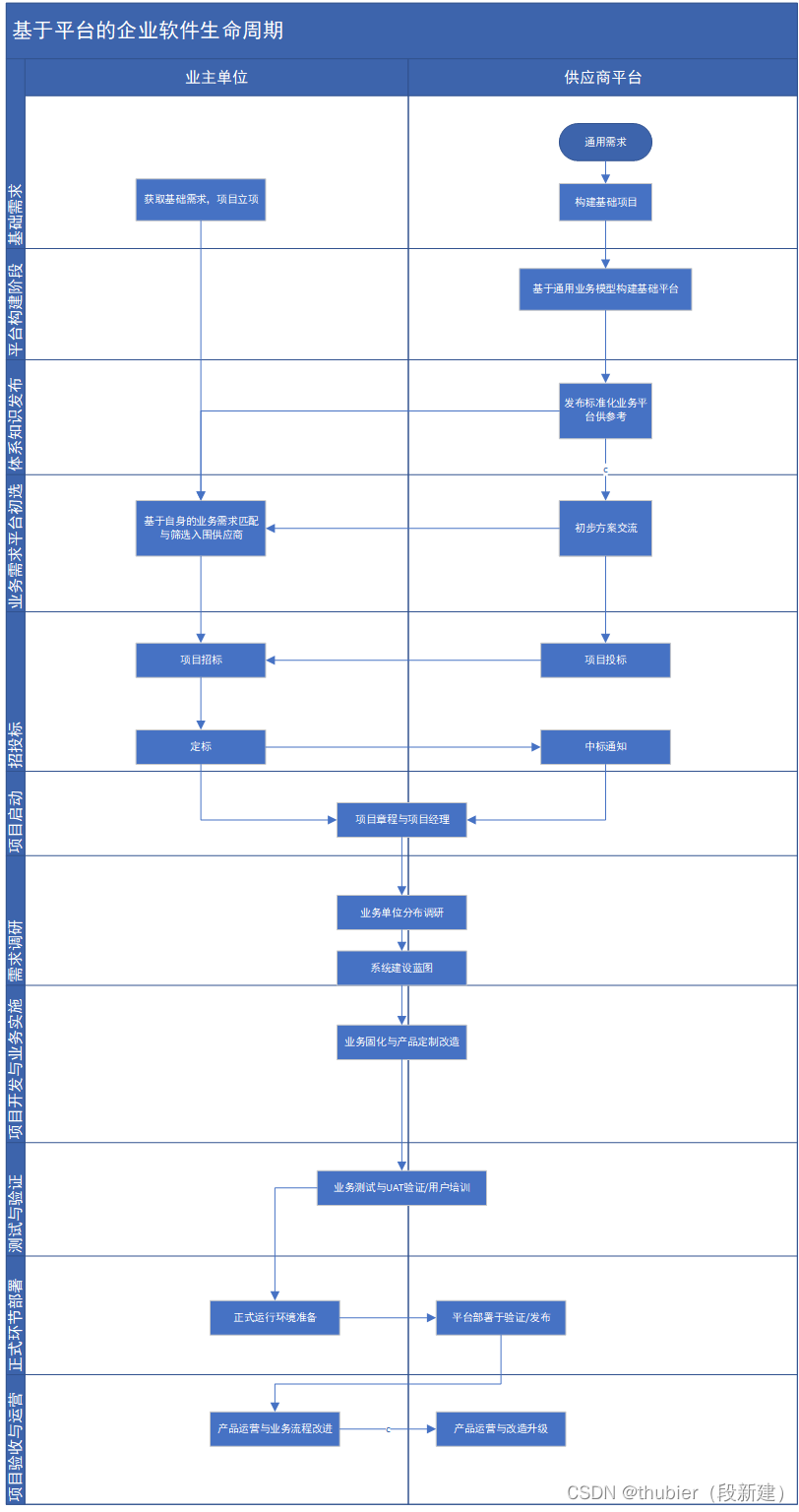
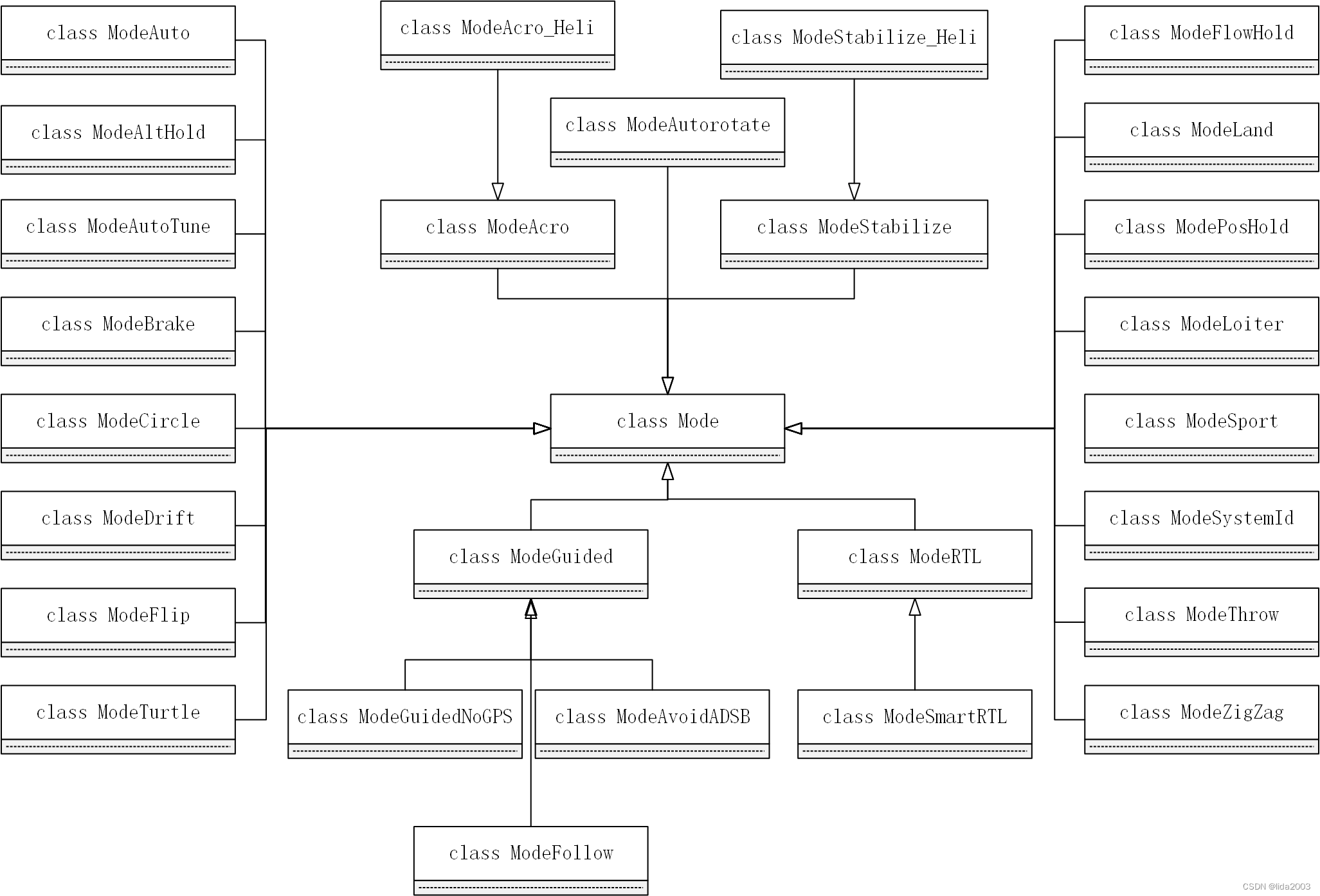
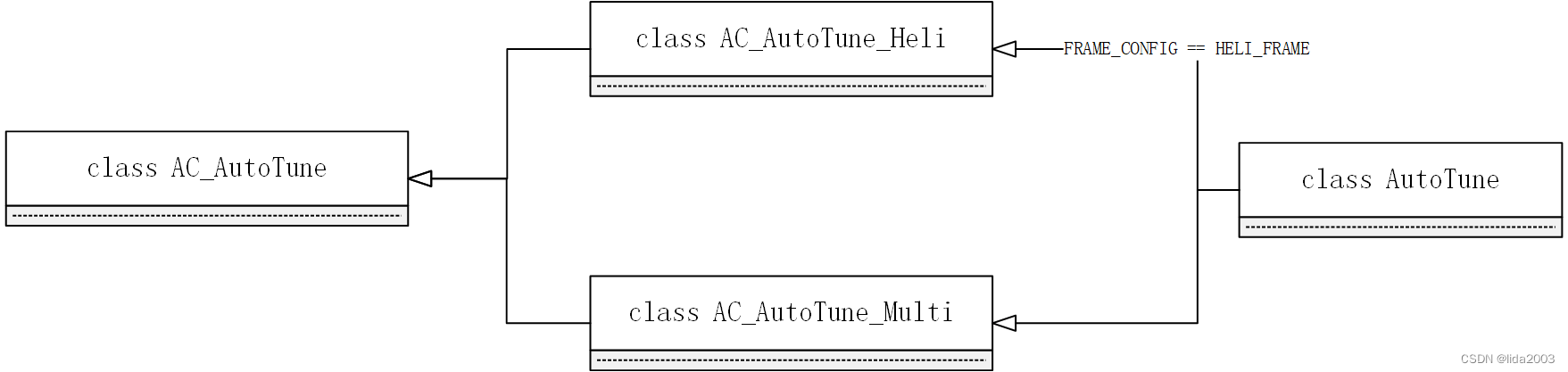
其相互之间的关系,如图所示:
3. 飞行模式-设计
飞行模式主要是通过以下三个函数来实现飞行模式下,动态飞行应用:
- 模式初始化(
init) - 模式任务(
run) - 模式退出(
exit)
3.1 模式初始化(init)
首先,需要完成新模式的初始化过程。
Copter::set_mode
└──> new_flightmode->init // e.g. ModeAcro::init
3.2 模式退出(exit)
其次,完成老模式的去初始化,退出之前的模式。
Copter::set_mode
└──> Copter::exit_mode
└──> old_flightmode->exit
3.3 模式任务(run)
最后,就是动态运行飞行模式,使用各个内部模块协调处理和应对各种飞行过程中遇到的问题,实现安全飞行。
Copter::update_flight_mode
└──> flightmode->run
3.4 模式切换场景
ArduPilot飞控系统中模式切换出现的场景涉及很多点位,每个点位都可能出现切换异常,此时,系统将会进行一些默认和失败的异常处理。
这里通过代码,简单的罗列了各种可能发生的场景:
- 上电初始化
EKF FAILSAFE触发do_failsafe_action FAILSAFE触发AP_Avoidance_Copter触发
3.4.1 上电初始化
init_ardupilot
└──> Copter::set_mode
└──> new_flightmode->init //e.g. ModeStabilize::init
3.4.2 EKF FAILSAFE触发
Copter::ekf_check // 10Hz task
└──> Copter::failsafe_ekf_event
└──> Copter::set_mode
3.4.3 do_failsafe_action FAILSAFE触发
do_failsafe_action涉及较多的场景,这里不再赘述了,详见:ArduPilot开源飞控之do_failsafe_action
- Copter::set_mode_RTL_or_land_with_pause
- Copter::set_mode_SmartRTL_or_land_with_pause
- Copter::set_mode_SmartRTL_or_RTL
- Copter::set_mode_auto_do_land_start_or_RTL
- Copter::set_mode_brake_or_land_with_pause
- Copter::set_mode_land_with_pause
3.4.4 AP_Avoidance_Copter触发
AP_Avoidance_Copter主要是避障传感器的应用
Copter::avoidance_adsb_update // 10Hz task
└──> AP_Avoidance::update
├──> AP_Avoidance::check_startup
│ └──> <> AP_Avoidance::deinit
│ └──> <> AP_Avoidance_Copter::handle_recovery
│ └──> <> AP_Avoidance_Copter::set_mode_else_try_RTL_else_LAND
│ └──> Copter::set_mode
└──> AP_Avoidance::handle_avoidance_local
├──> AP_Avoidance_Copter::handle_avoidance
│ ├──> <> Copter::set_mode
│ ├──> <> AP_Avoidance_Copter::handle_avoidance_vertical
│ │ └──> AP_Avoidance_Copter::check_flightmode
│ │ └──> Copter::set_mode
│ ├──> <> AP_Avoidance_Copter::handle_avoidance_horizontal
│ │ └──> AP_Avoidance_Copter::check_flightmode
│ │ └──> Copter::set_mode
│ └──> <> AP_Avoidance_Copter::handle_avoidance_perpendicular
│ └──> AP_Avoidance_Copter::check_flightmode
│ └──> Copter::set_mode
│
└──> <> AP_Avoidance_Copter::handle_recovery
└──> AP_Avoidance_Copter::set_mode_else_try_RTL_else_LAND
└──> Copter::set_mode
3.4.5 Crash触发
当发生Crash时,直接设置飞行模式为LAND。
Copter::motors_output // FAST_TASK
└──> <> AP_AdvancedFailsafe_Copter::terminate_vehicle
└──> <g2.afs.should_crash_vehicle()> copter.set_mode(Mode::Number::LAND, ModeReason::TERMINATE)
3.4.6 围栏设置触发
当满足围栏设置条件时,根据围栏触发设置,变更飞行模式。
Copter::fence_check
└──> <> Copter::set_mode
3.4.7 RC遥控触发
根据遥控器设置,触发飞行模式变更。
- RC_Channel_Copter::mode_switch_changed
- RC_Channel_Copter::do_aux_function_change_mode
- RC_Channel_Copter::do_aux_function
3.4.8 MAVLink触发
MAVLink命令触发飞行模式的变更。
- GCS_MAVLINK::_set_mode_common
- GCS_MAVLINK_Copter::handle_command_int_do_reposition
- GCS_MAVLINK_Copter::handle_command_long_packet
3.4.9 飞行模式内部逻辑触发
由于飞行模式可以认为是一种应用,根据应用场景,有些模式会根据需要进行模式切换。
比如:
- ModeBrake::run
- ModeFlip::run
- ModeLand::nogps_run
- ModeRTL::climb_start
- ModeRTL::descent_run
- ToyMode::update
- ToyMode::set_and_remember_mode
3.4.10 heli触发
FRAME_CONFIG == HELI_FRAME 直升机模型作为多旋翼是一种特殊的情况,这里单独有一个类对应处理。
Copter::heli_update_autorotation // FAST_TASK
└──> <> Copter::set_mode
3.4.11 MavLink_FrSkySPort
MavLink_FrSkySPort遥控有一个MAVLink的API接口,参考:ArduPilot开源代码之RCInput
注:这部分内容尚不太明朗,目前没有发现遥控器可以通过该协议设置飞控模式。如果有对此了解的朋友,请留言,谢谢!
4. 新增飞行模式
梳理下关于新增一个飞行模式的步骤,详细可参考:Adding a New Flight Mode to Copter
注:请注意,接下去的描述将会以RTL模式为例。
Step 1:新增模式名称
为新模式选择一个名称,并将其添加到modes.h中control_mode_t枚举的底部。这里以RTL为例。
// Auto Pilot Modes enumeration
enum class Number {
STABILIZE = 0, // manual airframe angle with manual throttle
ACRO = 1, // manual body-frame angular rate with manual throttle
ALT_HOLD = 2, // manual airframe angle with automatic throttle
AUTO = 3, // fully automatic waypoint control using mission commands
GUIDED = 4, // fully automatic fly to coordinate or fly at velocity/direction using GCS immediate commands
LOITER = 5, // automatic horizontal acceleration with automatic throttle
RTL = 6, // automatic return to launching point
CIRCLE = 7, // automatic circular flight with automatic throttle
LAND = 9, // automatic landing with horizontal position control
DRIFT = 11, // semi-automous position, yaw and throttle control
SPORT = 13, // manual earth-frame angular rate control with manual throttle
FLIP = 14, // automatically flip the vehicle on the roll axis
AUTOTUNE = 15, // automatically tune the vehicle's roll and pitch gains
POSHOLD = 16, // automatic position hold with manual override, with automatic throttle
BRAKE = 17, // full-brake using inertial/GPS system, no pilot input
THROW = 18, // throw to launch mode using inertial/GPS system, no pilot input
AVOID_ADSB = 19, // automatic avoidance of obstacles in the macro scale - e.g. full-sized aircraft
GUIDED_NOGPS = 20, // guided mode but only accepts attitude and altitude
SMART_RTL = 21, // SMART_RTL returns to home by retracing its steps
FLOWHOLD = 22, // FLOWHOLD holds position with optical flow without rangefinder
FOLLOW = 23, // follow attempts to follow another vehicle or ground station
ZIGZAG = 24, // ZIGZAG mode is able to fly in a zigzag manner with predefined point A and point B
SYSTEMID = 25, // System ID mode produces automated system identification signals in the controllers
AUTOROTATE = 26, // Autonomous autorotation
};
Step 2:定义基本接口
为mode.h中的模式定义一个新的类。复制类似的现有模式的类定义并更改类名可能是最简单的(即复制并重命名“class ModeStabilize”为“class ModeNewMode”)。新类应该继承自Mode类,并实现run()、name()和name4()以及可选的init()。
public:
// inherit constructor
using Mode::Mode;
bool init(bool ignore_checks) override;
void run() override;
protected:
const char *name() const override { return "NEWMODE"; }
const char *name4() const override { return "NEWM"; }
注:其他需要的接口,请根据需求自行添加,建议参考已有的飞行模式代码。
Step 3:补充基本接口实现
基于类似的模式(如mode_stabilize.cpp或mode_loiter.cpp)创建一个新的mode_.cpp文件。这个新文件可能会实现init()方法,该方法将在首次进入该模式时调用。如果可以进入模式,则此功能应返回true,如果不能,则返回false。
- mode_rtl.cpp的
init和run方法。
// rtl_init - initialise rtl controller
bool ModeRTL::init(bool ignore_checks)
{
if (!ignore_checks) {
if (!AP::ahrs().home_is_set()) {
return false;
}
}
// initialise waypoint and spline controller
wp_nav->wp_and_spline_init(g.rtl_speed_cms);
_state = SubMode::STARTING;
_state_complete = true; // see run() method below
terrain_following_allowed = !copter.failsafe.terrain;
// reset flag indicating if pilot has applied roll or pitch inputs during landing
copter.ap.land_repo_active = false;
// this will be set true if prec land is later active
copter.ap.prec_land_active = false;
#if AC_PRECLAND_ENABLED
// initialise precland state machine
copter.precland_statemachine.init();
#endif
return true;
}
// rtl_run - runs the return-to-launch controller
// should be called at 100hz or more
void ModeRTL::run(bool disarm_on_land)
{
if (!motors->armed()) {
return;
}
// check if we need to move to next state
if (_state_complete) {
switch (_state) {
case SubMode::STARTING:
build_path();
climb_start();
break;
case SubMode::INITIAL_CLIMB:
return_start();
break;
case SubMode::RETURN_HOME:
loiterathome_start();
break;
case SubMode::LOITER_AT_HOME:
if (rtl_path.land || copter.failsafe.radio) {
land_start();
} else {
descent_start();
}
break;
case SubMode::FINAL_DESCENT:
// do nothing
break;
case SubMode::LAND:
// do nothing - rtl_land_run will take care of disarming motors
break;
}
}
// call the correct run function
switch (_state) {
case SubMode::STARTING:
// should not be reached:
_state = SubMode::INITIAL_CLIMB;
FALLTHROUGH;
case SubMode::INITIAL_CLIMB:
climb_return_run();
break;
case SubMode::RETURN_HOME:
climb_return_run();
break;
case SubMode::LOITER_AT_HOME:
loiterathome_run();
break;
case SubMode::FINAL_DESCENT:
descent_run();
break;
case SubMode::LAND:
land_run(disarm_on_land);
break;
}
}
Step 4:添加类实例
通过搜索“ModeAcro”,然后在下面的某个地方添加新模式,在Copter.h中实例化新模式类。
#if MODE_ACRO_ENABLED == ENABLED
#if FRAME_CONFIG == HELI_FRAME
ModeAcro_Heli mode_acro;
#else
ModeAcro mode_acro;
#endif
#endif
ModeAltHold mode_althold;
#if MODE_AUTO_ENABLED == ENABLED
ModeAuto mode_auto;
#endif
#if AUTOTUNE_ENABLED == ENABLED
ModeAutoTune mode_autotune;
#endif
#if MODE_BRAKE_ENABLED == ENABLED
ModeBrake mode_brake;
#endif
#if MODE_CIRCLE_ENABLED == ENABLED
ModeCircle mode_circle;
#endif
#if MODE_DRIFT_ENABLED == ENABLED
ModeDrift mode_drift;
#endif
#if MODE_FLIP_ENABLED == ENABLED
ModeFlip mode_flip;
#endif
#if MODE_FOLLOW_ENABLED == ENABLED
ModeFollow mode_follow;
#endif
#if MODE_GUIDED_ENABLED == ENABLED
ModeGuided mode_guided;
#endif
ModeLand mode_land;
#if MODE_LOITER_ENABLED == ENABLED
ModeLoiter mode_loiter;
#endif
#if MODE_POSHOLD_ENABLED == ENABLED
ModePosHold mode_poshold;
#endif
#if MODE_RTL_ENABLED == ENABLED
ModeRTL mode_rtl;
#endif
Step 5:添加模式映射
在mode.cpp中,将新模式添加到mode_from_mode_num()函数中,以创建模式编号和类实例之间的映射。
// return the static controller object corresponding to supplied mode
Mode *Copter::mode_from_mode_num(const Mode::Number mode)
{
Mode *ret = nullptr;
switch (mode) {
#if MODE_ACRO_ENABLED == ENABLED
case Mode::Number::ACRO:
ret = &mode_acro;
break;
#endif
case Mode::Number::STABILIZE:
ret = &mode_stabilize;
break;
case Mode::Number::ALT_HOLD:
ret = &mode_althold;
break;
#if MODE_AUTO_ENABLED == ENABLED
case Mode::Number::AUTO:
ret = &mode_auto;
break;
#endif
#if MODE_CIRCLE_ENABLED == ENABLED
case Mode::Number::CIRCLE:
ret = &mode_circle;
break;
#endif
#if MODE_LOITER_ENABLED == ENABLED
case Mode::Number::LOITER:
ret = &mode_loiter;
break;
#endif
#if MODE_GUIDED_ENABLED == ENABLED
case Mode::Number::GUIDED:
ret = &mode_guided;
break;
#endif
case Mode::Number::LAND:
ret = &mode_land;
break;
#if MODE_RTL_ENABLED == ENABLED
case Mode::Number::RTL:
ret = &mode_rtl;
break;
#endif
#if MODE_DRIFT_ENABLED == ENABLED
case Mode::Number::DRIFT:
ret = &mode_drift;
break;
#endif
Step 6:设置默认飞行模式
将新飞行模式添加到config.h中FLIGHT_MODE_1~FLIGHT_MODE_6,使用新模式的编号,如:RTL。
//
// FLIGHT_MODE
//
#ifndef FLIGHT_MODE_1
# define FLIGHT_MODE_1 Mode::Number::STABILIZE
#endif
#ifndef FLIGHT_MODE_2
# define FLIGHT_MODE_2 Mode::Number::STABILIZE
#endif
#ifndef FLIGHT_MODE_3
# define FLIGHT_MODE_3 Mode::Number::STABILIZE
#endif
#ifndef FLIGHT_MODE_4
# define FLIGHT_MODE_4 Mode::Number::STABILIZE
#endif
#ifndef FLIGHT_MODE_5
# define FLIGHT_MODE_5 Mode::Number::STABILIZE
#endif
#ifndef FLIGHT_MODE_6
# define FLIGHT_MODE_6 Mode::Number::RTL
#endif
Step 7:地面站配置参数修改
选择将飞行模式添加到mavlink/ardupilotmega.xml中的COPTER_mode枚举中,因为一些地面站可能会使用此枚举自动填充可用飞行模式列表。
<enum name="COPTER_MODE">
<description>A mapping of copter flight modes for custom_mode field of heartbeat.</description>
<entry value="0" name="COPTER_MODE_STABILIZE"/>
<entry value="1" name="COPTER_MODE_ACRO"/>
<entry value="2" name="COPTER_MODE_ALT_HOLD"/>
<entry value="3" name="COPTER_MODE_AUTO"/>
<entry value="4" name="COPTER_MODE_GUIDED"/>
<entry value="5" name="COPTER_MODE_LOITER"/>
<entry value="6" name="COPTER_MODE_RTL"/>
<entry value="7" name="COPTER_MODE_CIRCLE"/>
<entry value="9" name="COPTER_MODE_LAND"/>
<entry value="11" name="COPTER_MODE_DRIFT"/>
<entry value="13" name="COPTER_MODE_SPORT"/>
<entry value="14" name="COPTER_MODE_FLIP"/>
<entry value="15" name="COPTER_MODE_AUTOTUNE"/>
<entry value="16" name="COPTER_MODE_POSHOLD"/>
<entry value="17" name="COPTER_MODE_BRAKE"/>
<entry value="18" name="COPTER_MODE_THROW"/>
<entry value="19" name="COPTER_MODE_AVOID_ADSB"/>
<entry value="20" name="COPTER_MODE_GUIDED_NOGPS"/>
<entry value="21" name="COPTER_MODE_SMART_RTL"/>
<entry value="22" name="COPTER_MODE_FLOWHOLD"/>
<entry value="23" name="COPTER_MODE_FOLLOW"/>
<entry value="24" name="COPTER_MODE_ZIGZAG"/>
<entry value="25" name="COPTER_MODE_SYSTEMID"/>
<entry value="26" name="COPTER_MODE_AUTOROTATE"/>
<entry value="27" name="COPTER_MODE_AUTO_RTL"/>
</enum>
5. 总结
本章重点讨论了:
- 梳理了当前ArduPilot已经实现的飞行模式,给出了飞行模式之间的类继承关系。
- 通过飞行模式的设计,从类实现原理上给出了重要的框架实现接口。
- 从切换场景角度阐述了飞行模式复杂性,从而更好的解释了类继承关系的重要性。
- 最后,给出了新增自定义飞行模式的方法。
希望,能够通过初步的研读内容,能为后续新增自定义飞控飞行模式带来便捷性。
6. 参考资料
【1】ArduPilot开源飞控系统之简单介绍
【2】ArduPilot之开源代码Task介绍
【3】ArduPilot飞控启动&运行过程简介
【4】ArduPilot开源代码之AP_RCProtocol_CRSF
【5】无人机跟随一维高度避障场景–逻辑分析
【6】ArduPilot开源飞控之do_failsafe_action
【7】ArduPilot开源代码之RCInput