专栏文章:
深蓝学院-多传感器融合定位课程-第1章-概述_goldqiu的博客-CSDN博客
深蓝学院-多传感器融合定位课程-第2章-3D激光里程计I_goldqiu的博客-CSDN博客
深蓝学院-多传感器融合定位课程-第3章-3D激光里程计II_goldqiu的博客-CSDN博客
深蓝学院-多传感器融合定位课程-第4章-点云地图构建及基于地图的定位_goldqiu的博客-CSDN博客
深蓝学院-多传感器融合定位课程-第5章-惯性导航原理及误差分析_goldqiu的博客-CSDN博客
深蓝学院-多传感器融合定位课程-第6章-惯性导航解算及误差模型_goldqiu的博客-CSDN博客
github保存了相关代码和学习笔记:
Shenlan-Course-Multi-Sensor-Fusion-for-Localization-Mapping/第7章:基于滤波的融合方法I at main · goldqiu/Shenlan-Course-Multi-Sensor-Fusion-for-Localization-Mapping
第7章:基于滤波的融合方法Ⅰ
课程内容
代码、PPT、视频见文件夹
课程笔记
滤波器作用
滤波器的本质:结合预测与观测,得到最“精确”的后验值。 实际中,预测与观测均从传感器而来,因此滤波器的作用便是结合各传感器得到一个最好的融合结果。
1) 实际中预测往往从IMU、编码器等传感器递推而来; 2) 观测往往从GPS、雷达、相机等传感器而来; 3) 后验为融合后的结果,即定位模块的输出。

概率基础知识
概率、概率密度



高斯概率密度函数

联合高斯概率密度函数

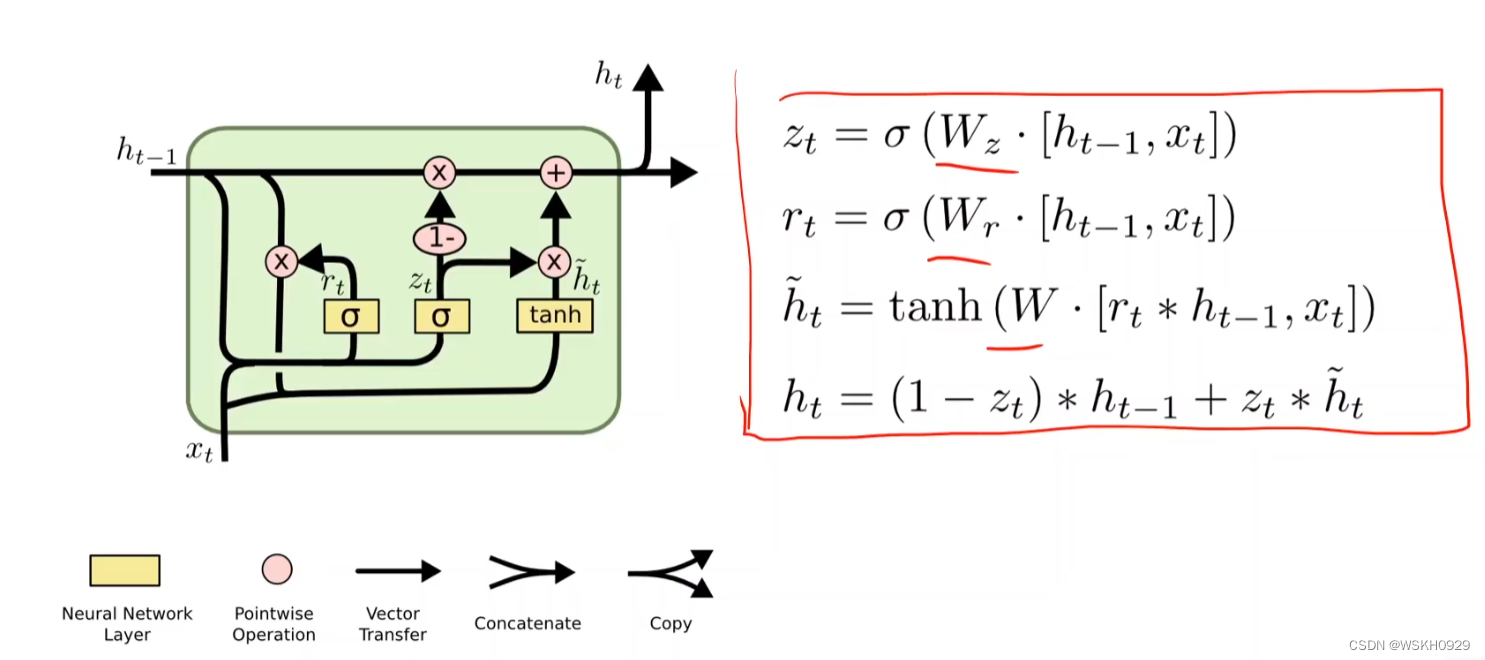
四元数微分方程


高斯随机变量的线性分布

滤波器基本原理
状态估计模型

贝叶斯滤波

经过以上化简,最终后验概率可以写为

根据以上结果,可以画出贝叶斯滤波的信息流图如下


1) 在高斯假设前提下,用贝叶斯滤波的原始形式推导比较复杂,可以利用高斯的特征得到简化形式,即广义高斯滤 波。后面KF、EKF、IEKF的推导均采用这种形式。 2) 实际中,UKF 和 PF 多应用再扫地机器人等2D小场景,与本课程目标场景不符,因此不做讲解。
卡尔曼滤波(KF)推导



扩展卡尔曼滤波(EKF)推导


迭代扩展卡尔曼滤波(IEKF)推导


迭代的方法是重新做线性化;
终止的条件是:两次的后验状态均值之间的差异小于一个阈值。
基于滤波器的融合
通过以上推导,滤波问题可以简单理解为“预测 + 观测 = 融合结果”。 结合实际点云地图中定位的例子,预测由IMU给出,观测即为激光雷达点云和地图匹配得到的姿态和位置。 融合流程用框图可以表示如下:

状态方程

观测方程

构建滤波器

Kalman 滤波实际使用流程










作业
在提供的工程框架中,补全代码,实现基于地图的融合定位,并与不加滤波时的定位结果做比较。 (注:由于kitti数据有部分问题,虽然课程提供了修复后的数据,但是仍会对结果有影响,因此在某些路段滤波效果会较差,可以忽略这部分路段。)
评价标准: 1)及格:补全代码,且滤波功能正常。 2)良好:补全代码,功能正常,且经过调试参数,滤波后性能比滤波前好。(这个没有定量标准,各位把详细的误差对比结果提供在作业中,供助教有足够依据评阅) 3) 优秀: 在前面的模型推导中 , 考虑了器件误差中的随机游走 , 请给出不考虑随机游走模型时的推导过程,并在工程框架中实现。对比这两种方法的性能差异(最好给出原因分析)。 另外,kalman滤波的性能对噪声的设置较为敏感,请在提供结果的同时,给出不同噪声设置情况下的结果对比(至少5组参数)。

参考资料:Quaternion kinematics for the error-state Kalman filter
环境安装
需要安装新版本的proto 3.15x,按照第四章的方式生成对应的文件。
出现Protobuf版本不匹配的错误:
protoc --version 查看Protobuf版本是否对应
不对应则更改环境:
sudo gedit ~/.bashrc
export PATH=/usr/local/bin/:$PATH
source ~/.bashrc
参考博客
多传感器融合定位理论基础(八):基于滤波的融合方法
以误差作为状态量的滤波方法ESKF(Error state kalman filter)较为常用,“EKF尝试通过线性化来近似名义状态的变化,而EsKF则尝试通过线性化来近似误差状态的变化”。而使用位姿做更新的EKF方法也成为(名义方程)。在完成一次ESKF迭代后,有点需要主要的是:当有新的融合数据进来,要进行一次新的观测时,因为之前的状态量已经用来补偿了,因此需要清零,所以此时的 先验状态量 delta_x_k_hat = 0 。 变化的更新体现在观测上 delta_y = (预测值 - 观测值) 。


![[附源码]Python计算机毕业设计房屋租赁管理系统设计Django(程序+LW)](https://img-blog.csdnimg.cn/ffe5616f2cba4066a94e1ab63536c2c0.png)