摘要
近年来为了提高医学图像分割的性能,提出了大量基于多尺度特征融合的UNet变体。与以往通过多尺度特征融合提取医学图像上下文信息的方法不同,本文提出了一种新的多尺度注意力网格(MA-Net)在这个网络方法中引入了自注意力机制,自适应的整合局部特征和全局依赖关系。基于这个注意力机制,MANet可以捕获丰富的上下文依赖关系。
在这个网络结构中设计了两个块结构即PAB(位置注意块)以及多尺度融合注意块(MFAB)。PAB用于在空间维度上对特征相互依赖进行建模,从而在全局视图中捕获像素之间的空间依赖关系。此外MFAB还通过多尺度语义特征融合来获取任意特征映射之间的通道依赖关系。
Introduction
以往通常使用不同大小的池化核来融合多尺度上下文特征信息,采用不同采样率的扩张卷积和池化操作来获得丰富的图像多尺度上下文信息,这进一步提高了分割性能。然而扩张卷积和池化操作无法利用全局视图中像素之间的空间和通道关系。此外使用池化操作很容易丢失特征映射信息中的细节。
本文提出的MA-Net具体来说,是使用了两个基于自注意机制的块来捕获特征图的空间依赖性和通道依赖性。一种是位置注意块(PAB),另一种是多尺度融合注意块(MFAB)。通过自注意机制,利用PAB算法获取特征图中像素之间的空间依赖关系。MFAB通过应用注意机制来捕获特征映射之间的通道依赖关系。除了考虑高级特征映射的通道依赖关系外,MFAB还考虑了低级特征映射的通道依赖关系。将高层和低层特征图的通道依赖关系以和的方式融合,利用注意机制获得丰富的多尺度特征图语义信息,提高网络性能。
总的来说就是PAB模块用于获取全局视图下像素之间的空间依赖关系,MFAB模块通过融合高低语义特征来获取任意特征映射之间的通道依赖关系。
方法
网络结构主要由三个模块构成Res-block,Position-wise Attention Block(PAB)和Multi-scale Fusion Attention Block(MFAB)
残差模块由3个3x3的卷积模块和残差连接组成用于提取高纬度的特征信息。位置注意块(PAB)用于捕获特征映射的空间依赖关系。多尺度融合注意块通过融合高低特征信息来聚合任意特征映射之间的通道依赖关系。
Res-Block
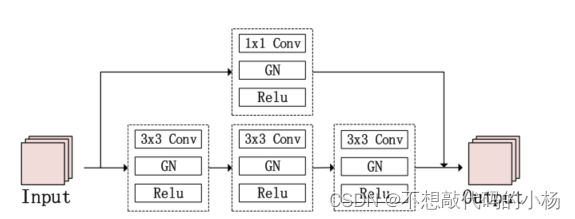
受残差连接的启发,我们使用3个3 × 3 Conv块和1个残差连接在编码器路径上捕获高维特征信息。1x1卷积是用来控制输入通道的数量的
Res-Block的结构图如下:
PAB-位置注意模块
为了在局部特征图上捕获丰富的上下文关系,我们使用PAB模块来捕获任意两个位置特征图之间的空间依赖关系。这个PAB来捕获任意两个位置特征图之间的空间依赖关系。PAB模块可以在局部特征图上建模更广泛的丰富的空间上下文信息。
PAB的架构图如下所示:
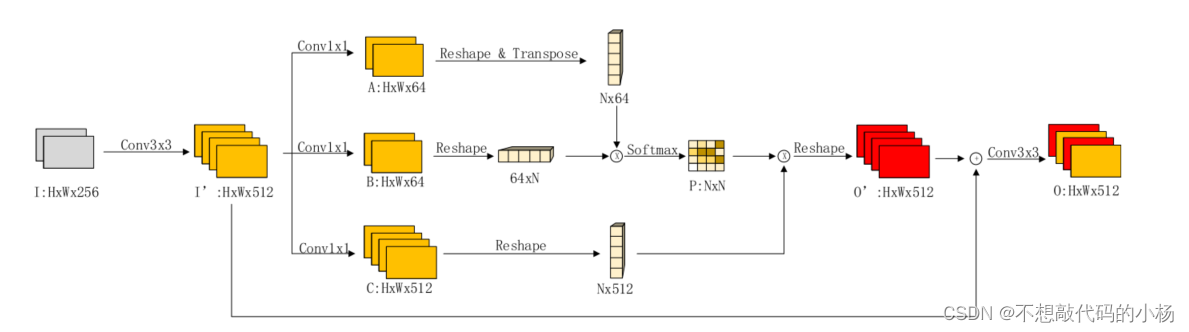
给定一个局部特征图I,将其输入到一个3x3的卷积当中得到I',然后利用1x1的卷积分别生成A,B,C.然后再对A,B进行重塑,然后在A,B之间进行矩阵乘法,之后利用Softmax得到空间注意特征图。同时我们将C也进行重塑。然后将空间注意特征图与C进行矩阵相乘。并将这个结果进行Reshape得到O'。然后我们在I'和O'之间进行逐元素求和。最后通过3x3的卷积得到最终的输出结果。这个最终的输出结果具有全局上下文视图
多尺度融合注意模块
MFAB模块的主要思想是, MFAB从没有额外空间维度的多层次特征图中学习每个特征通道的重要性,并根据重要性增强有用的特征图和抑制对肝脏和肿瘤分割任务贡献较小的特征图。具体地说,我们从低级特征映射和高级特征映射来描述特征通道的相互依赖性。高级特征具有丰富的图像语义信息,而跳过连接的低级特征具有更多的边缘信息。低级特征用于恢复图像的细节
MFAB结构如下图所示

分别对高级特征和低级特征应用通道级注意机制。目的是在分割任务中增加每个特征通道中重要信息的权重,忽略无用的特征信息。
如上图所示,首先将高级特征输入到1x1的卷积核3x3的卷积当中。XHinput和XLinput有相同数量的通道,V=[V1,V2,....Vc]是卷积核的集合其中Vc是第c个卷积核的参数。我们可以通过以下公式计算U

其中vc = [v1c, v2c,…], vcc]和Xinput = [x1, x2,…], xc], Xinput∈(XHinput或者XLinput)。这里*表示卷积。然后使用全局平均池化对每个特征进行压缩。Sc1和Sc2是通过缩小特征映射XHinput和XLinput来获得的。S1和S2的第c个元素计算如下
其中,H和W分别为高度和宽度,uc为各通道的特征图。然后使用具有两个全连接(FC)层和激活函数的瓶颈层来限制模型的复杂性,并捕获通道依赖性z1和z2。用公式表现如下:

其中P1和P2表示全连接层,δ1和δ2分别表示sigmoid函数和ReLU激活函数
然后我们将低级特征和高级特征相结合
![]()
XHoutput通过重新缩放具有激活V的T来获得:
![]()
损失函数
本文采用的是交叉熵损失函数和DiceLoss相结合的方法作为最终的损失函数。损失函数表示为

其中yi和pi表示ground truth和预测的feature map, N表示batch size
总结
本文在图像分割方法中引入了自注意机制。特别地,我们利用自注意机制获取特征图的空间和通道依赖关系,并基于特征图之间的通道依赖关系考虑多尺度语义信息。此外,我们还采用了一种新的损失函数,它将交叉熵和Dice结合起来