本文最后修改时间:2022年08月23日 01:57
一、本节简介
本节以树莓派pico开发板为例,搭建windows下的编译环境。
二、实验平台
1、硬件平台
1)树莓派pico开发板
①树莓派pico开发板
②micro usb数据线
2)电脑
2、软件平台
暂无
三、版权声明
1)作者:甜甜的大香瓜
2)声明:喝水不忘挖井人,转载请注明出处。
3)纠错/业务合作:897503845@qq.com
4)香瓜嵌入式之树莓派群:512598061
5)本文出处:原创连载资料《简单粗暴学树莓派》
6)完整开源资料下载地址(电脑端打开):
opengua.taobao.com
四、实验前提
1、在进行本文步骤前,请先阅读以下章节:
1)《简单粗暴学树莓派》的“第一章至第二章”章节。
2)《Raspberry Pi Pico : C/C++ SDK and Toolchain Setup in Windows 10》:
Raspberry Pi Pico : C/C++ SDK and Toolchain Setup in Windows 10 - Arnab Kumar Das
3)《Raspberry-Pi-PICO系列--第四篇 开发环境搭建-Windows系统 + Visual Studio Code开发》:Raspberry-Pi-PICO系列--第四篇 开发环境搭建-Windows系统 + Visual Studio Code开发_coder.mark的博客-CSDN博客
4)《getting-started-with-pico》的《9.2. Building on MS Windows》
2、在进行本文步骤前,请先实现以下章节:
暂无
五、基础知识
1、pico是什么?
答:
pico是树莓派公司在21年1月出的一款单片机开发板,价格大概在4美金(20多元人民币)。
目前型号有pico、pico H(pico焊上插针)、pico W(pico基础上增加wifi模块)、pico WH(pico W焊上插针)。


2、pico能在几个平台做开发?
答:
可以在树莓派(比如树莓派4等)、mac、windows下做开发。
3、windows下需要装哪些软件?
答:

其实要下载安装的软件有很多,上图的只是让你能命令行编译的软件。详情看本文具体操作步骤(或看目录快速浏览)。
六、实验步骤
1、安装Arm GNU Toolchain
1)下载链接
Downloads | GNU Arm Embedded Toolchain Downloads – Arm Developer
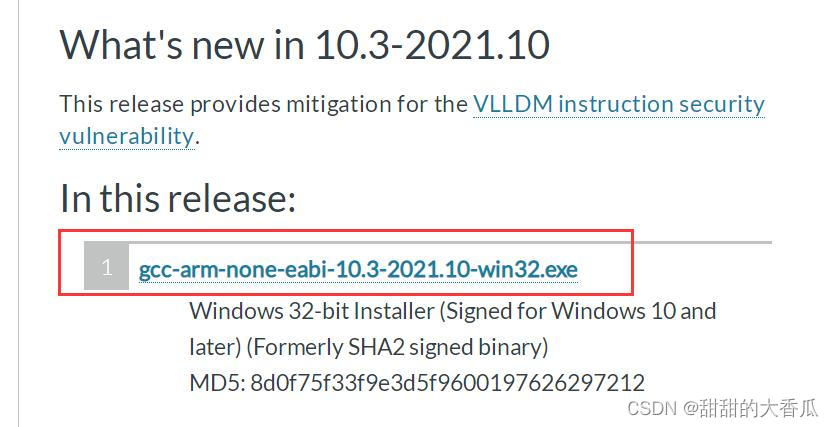
2)安装注意事项
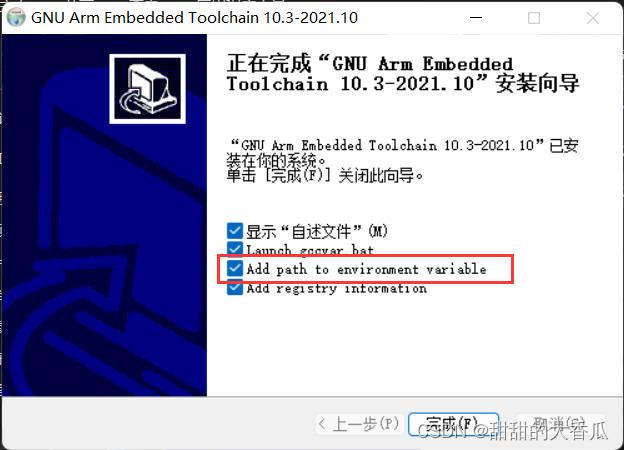
这里特别注意要打上勾。
可以在命令行里输入“arm-none-eabi-gcc -v”来判断是否装好。
2、安装CMake
1)下载链接
https://objects.githubusercontent.com/github-production-release-asset-2e65be/537699/658da1cd-1df4-4ba8-ae1f-24f8f742f29d?X-Amz-Algorithm=AWS4-HMAC-SHA256&X-Amz-Credential=AKIAIWNJYAX4CSVEH53A%2F20220805%2Fus-east-1%2Fs3%2Faws4_request&X-Amz-Date=20220805T124236Z&X-Amz-Expires=300&X-Amz-Signature=2fd92b6a8dd08e92e247972e293098ef571ac9f44bce61c1a15171fe4ede8d76&X-Amz-SignedHeaders=host&actor_id=0&key_id=0&repo_id=537699&response-content-disposition=attachment%3B%20filename%3Dcmake-3.24.0-windows-x86_64.msi&response-content-type=application%2Foctet-stream

2)安装注意事项
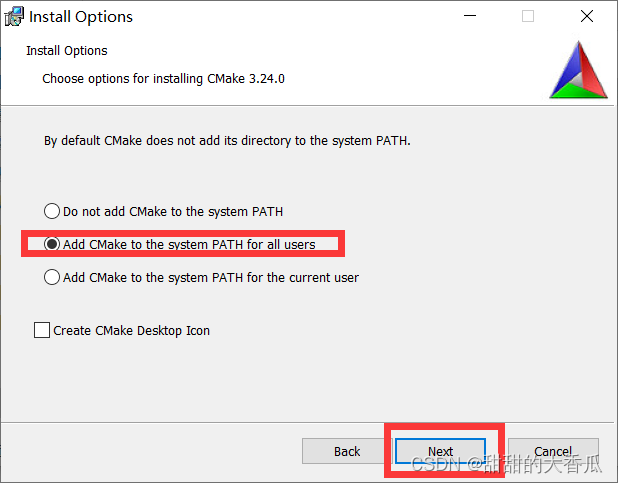
需如上选择。
3、安装Visual Studio2022
1)下载链接
下载 Visual Studio Tools - 免费安装 Windows、Mac、Linux
2)安装注意事项

要注意文件很大,看看C盘够不够空间。
4、安装Python3.10
1)下载链接
Python Releases for Windows | Python.org

2)安装注意事项


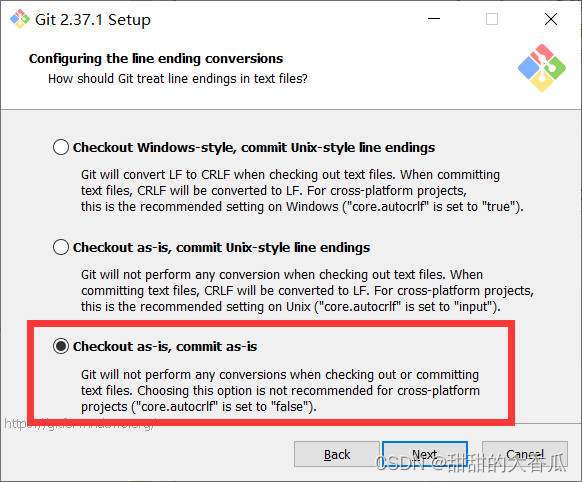
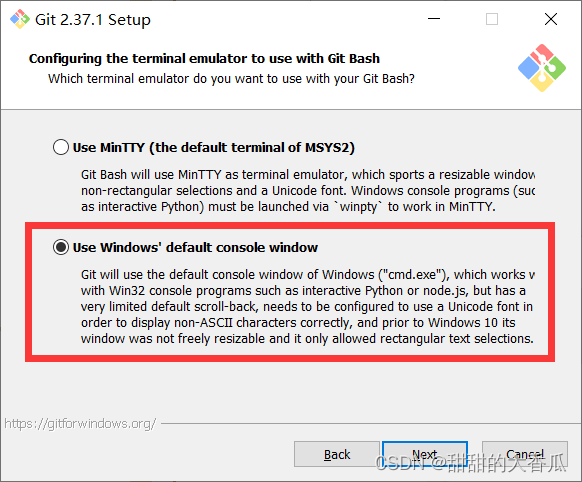
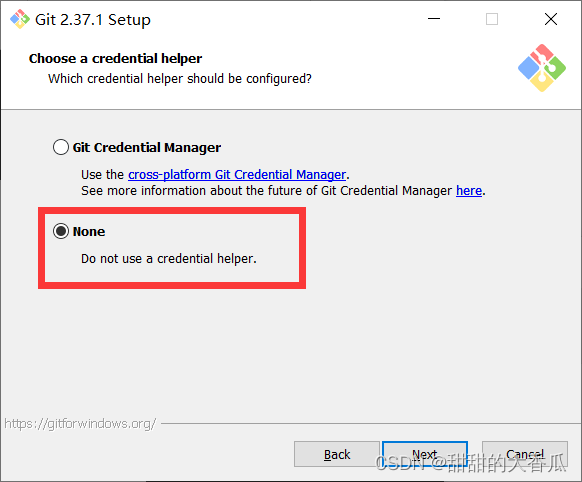
5、安装Git
1)下载链接
https://git-scm.com/download/win

2)安装注意事项(其他按默认)

6、下载pico的SDK和例程
1)在D盘新建一个文件夹,命名为“GUA_PICO”。
2)在GUA_PICO里,点右键,选择“Git Bash Here”。
3)依次输入:
| git clone -b master https://github.com/raspberrypi/pico-sdk.git cd pico-sdk git submodule update --init cd .. git clone -b master https://github.com/raspberrypi/pico-examples.git |

7、设置SDK的环境变量
1)右键“我的电脑”属性,点击“高级系统设置”,点击系统属性里“高级”中的“环境变量”。


填入“PICO_SDK_PATH”、“D:\GUA_PICO\pico-sdk”
8、创建编译文件夹并编译
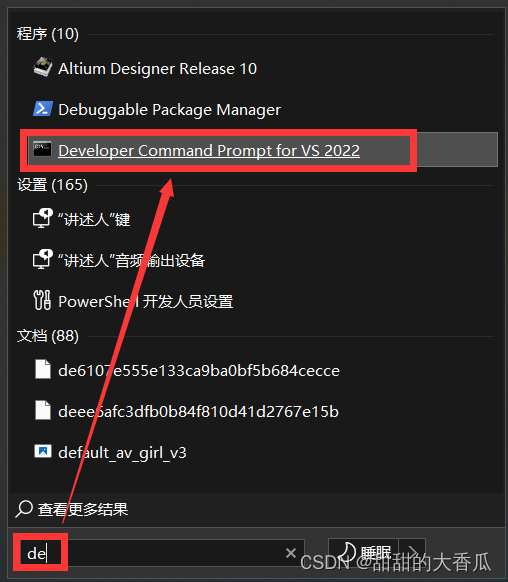
1)打开一个新的Developer Command Prompt for VS 2022。
2)输入:
| D: cd D:\GUA_PICO\pico-examples mkdir build cd build cmake -G "NMake Makefiles" .. nmake |
其中nmake是编译所有例程,时间会比较久。
注意,如果更换了Arm GNU Toolchain的版本,需要删掉build文件夹里的东西,重新编译
注意:
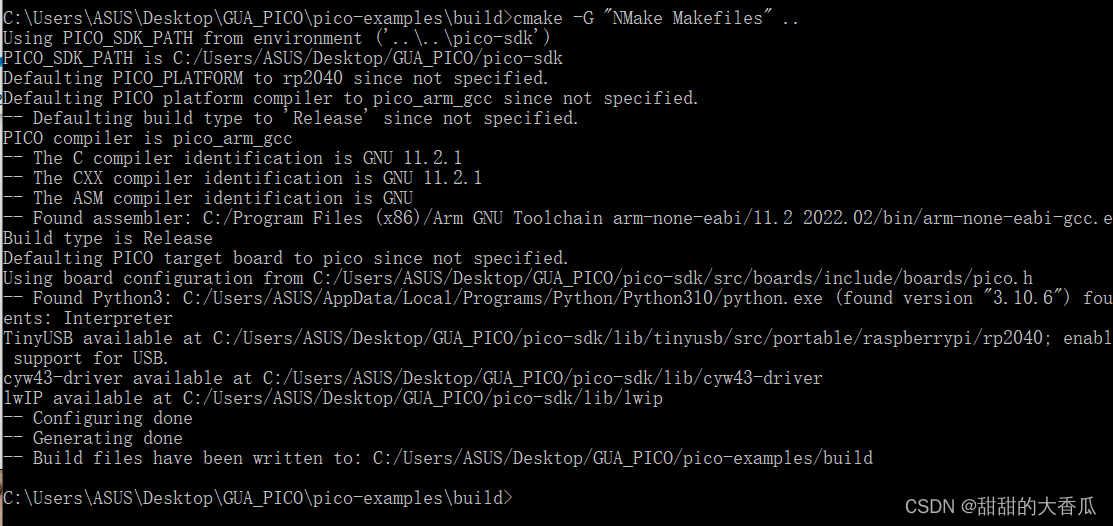
如上图则表示“cmake -G "NMake Makefiles" ..”执行正确了。
如果是报错,有可能是环境变量的路径没设置对,或者要先把build文件夹内的文件删除干净。
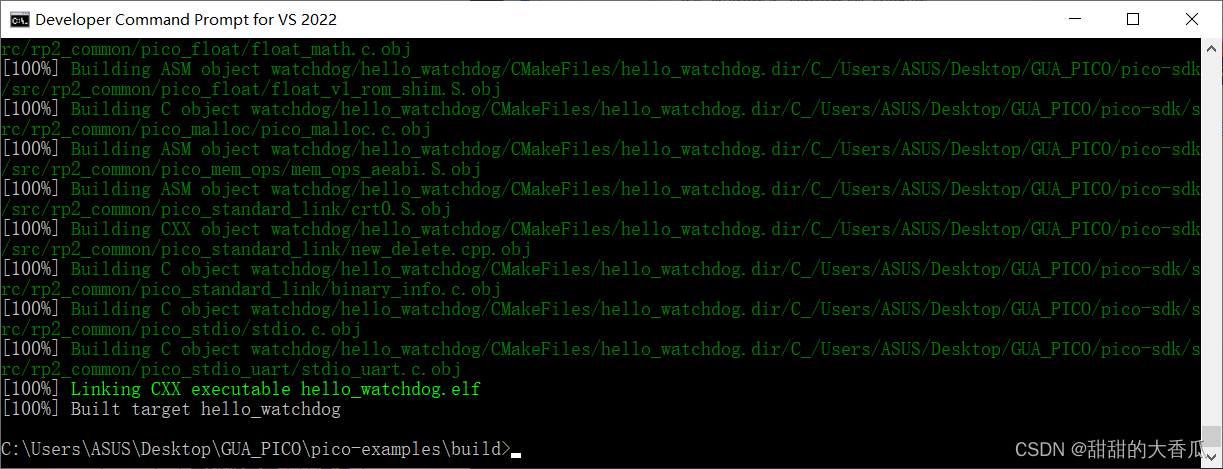
如上图,就说明命令行的编译环境已建好。
9、安装Visual Studio Code
1)下载链接
https://code.visualstudio.com/download
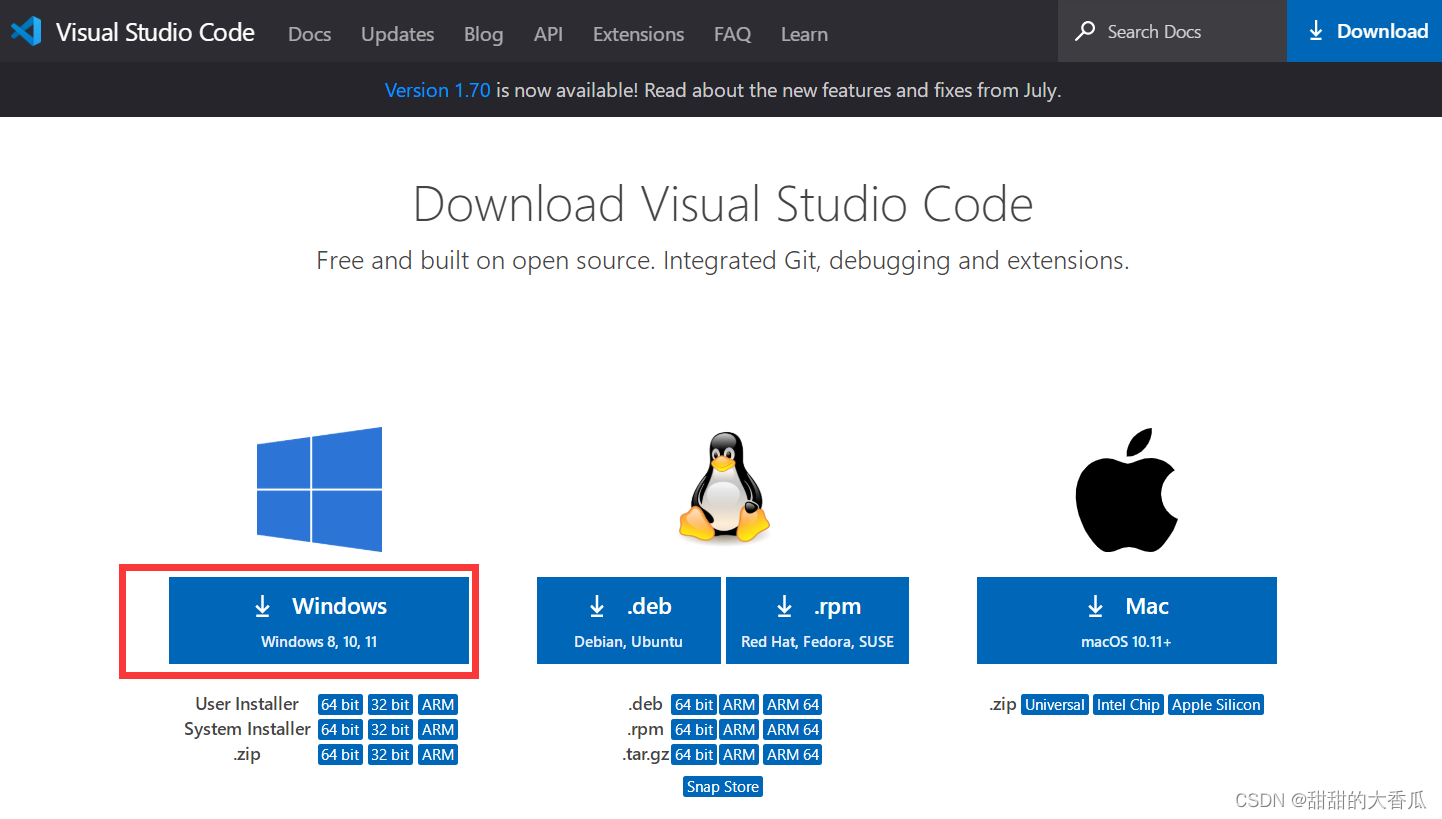
2)安装注意事项
默认就有添加PATH,都按默认装即可。
10、配置Visual Studio Code
1)用Developer Command Prompt for VS 2022打开Visual Studio Code
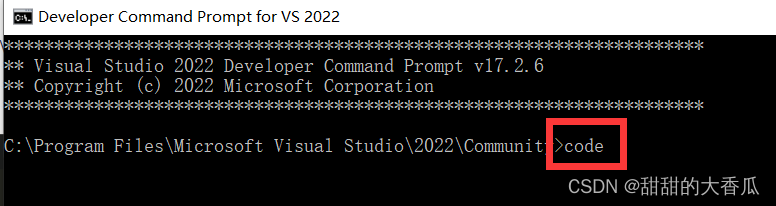
注意这里不能直接打开VS CODE,一定要用命令行打开。
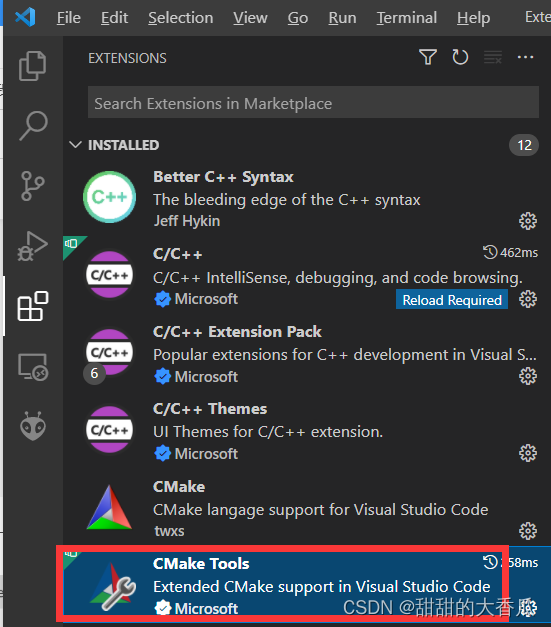
2)在VS CODE里按Ctrl + Shift + X,安装CMake Tool(注意不是CMake)
3)添加环境变量
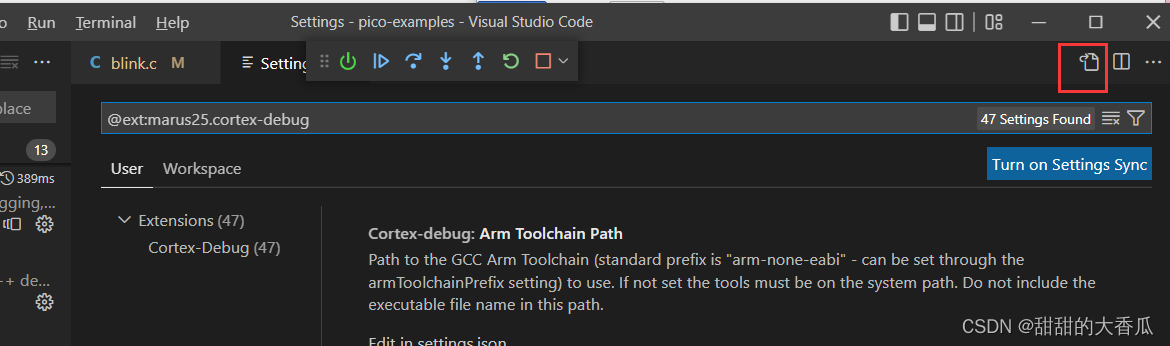
点击右下角设置选择extensions setting
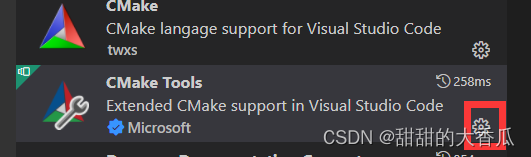
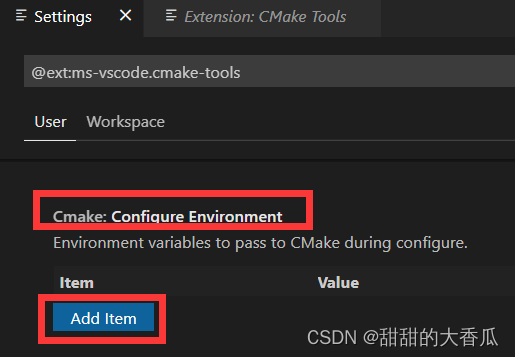
与前面一样填入“PICO_SDK_PATH”、“D: \GUA_PICO\pico-sdk”。如下图

往下找到Cmake: Generator,输入“NMake Makefiles”,然后关闭Settings。

4)安装cortex-Debug插件

11、使用VS CODE编译
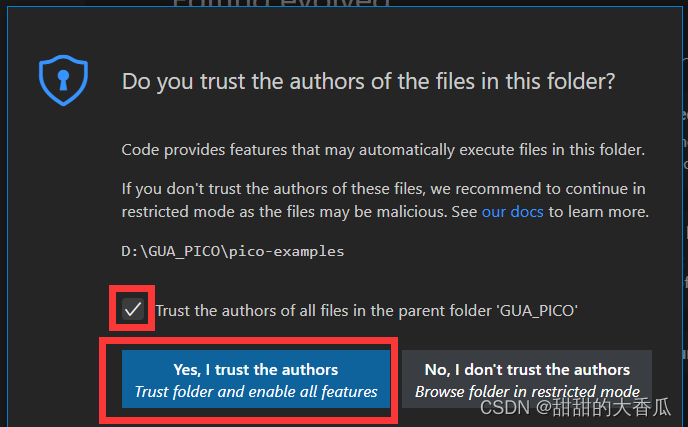
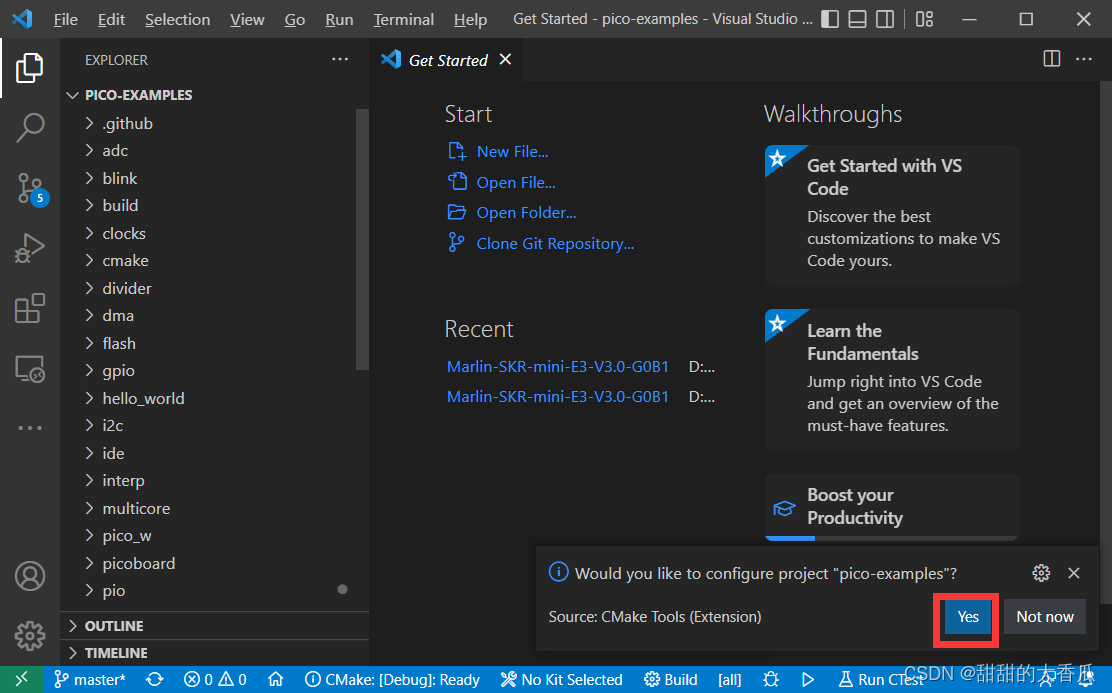
导入工程,File->Open Folder,选择pico-examples的路径。香瓜的路径是“D:\ GUA_PICO\pico-examples”,如下图

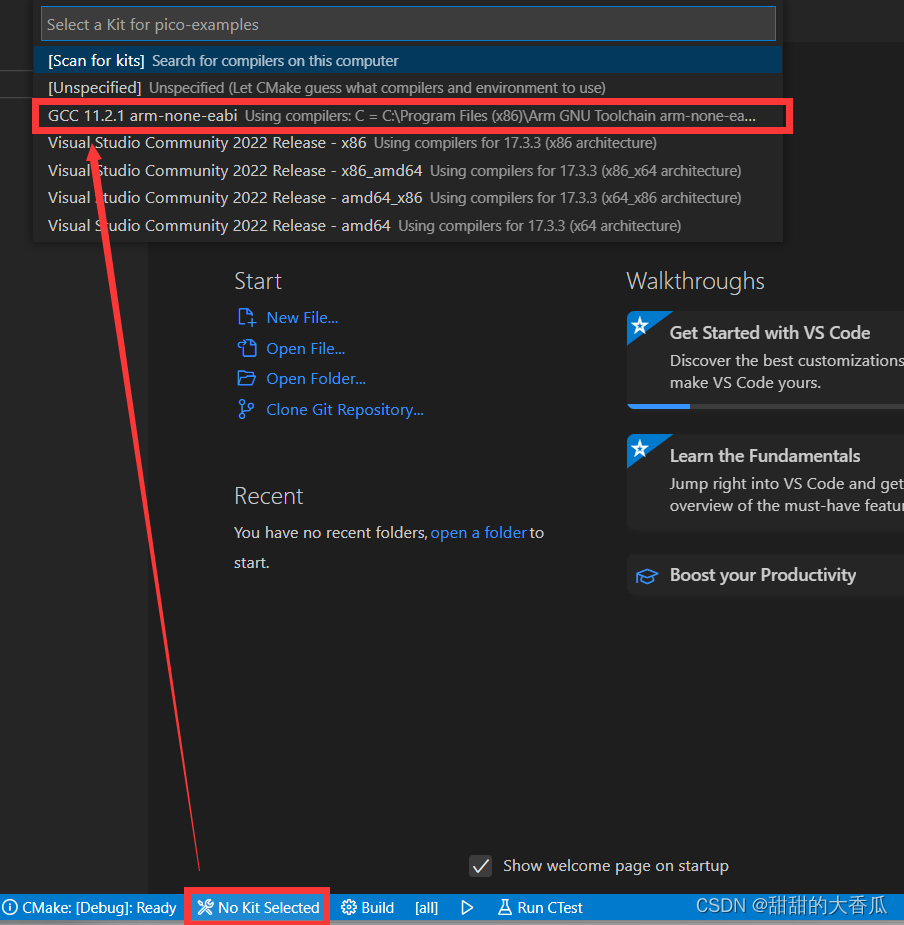
点击“all”选择“blink”工程,我们只选择编译这个工程,否则时间非常久。如下图

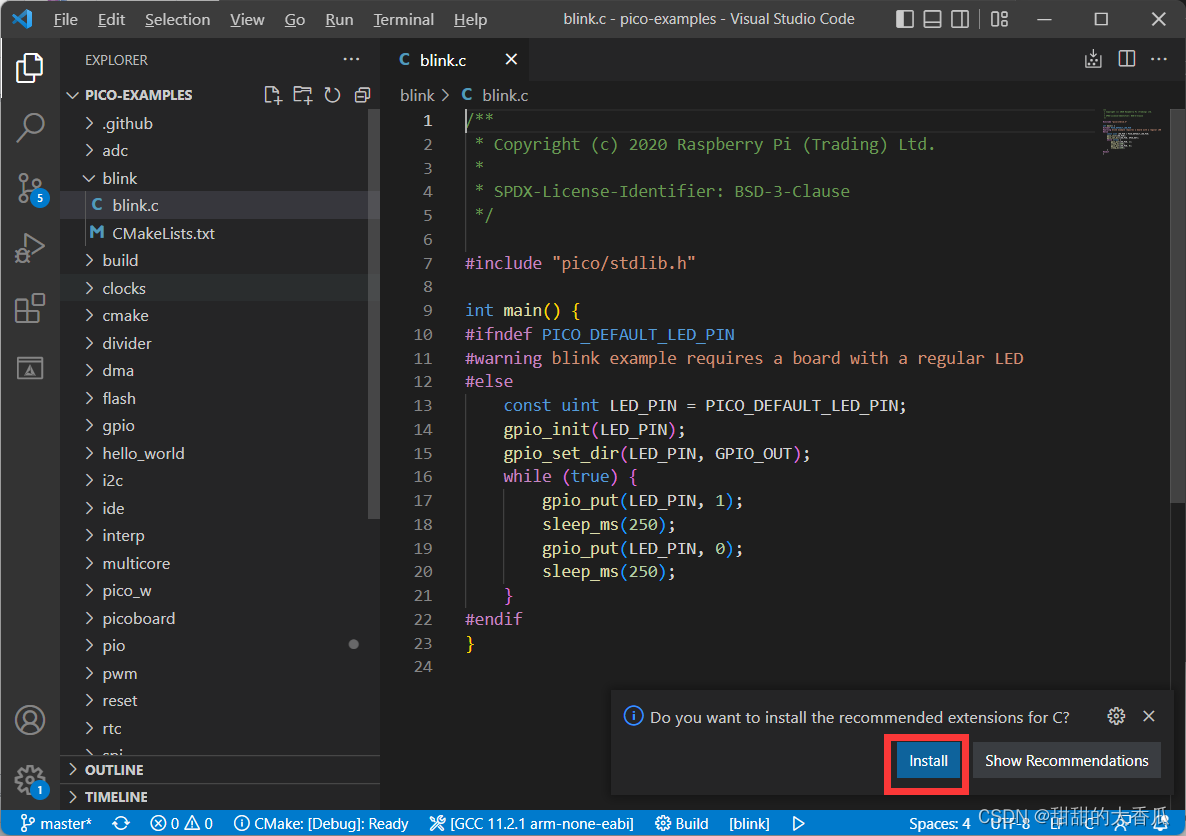
此时可以随便修改一下blink(不改的话编译文件不会生成),点build编译,如下图

如果有弹出安装C的指令,点击安装

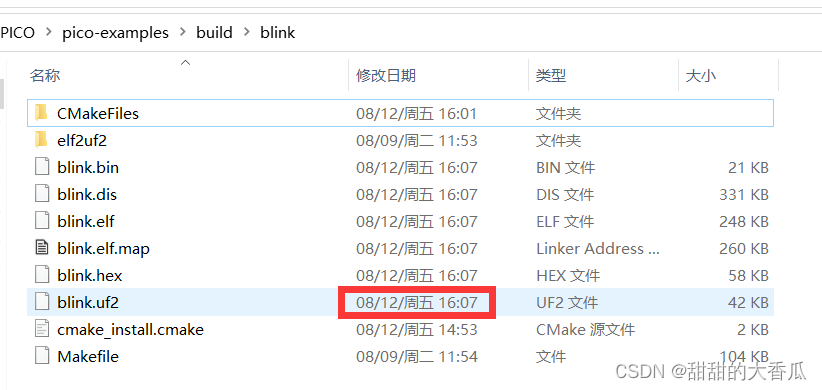
查看uf2编译文件的时间是否被更新了,如果更新了,说明编译成功,如下图
12、下载uf2编译文件到pico
1)按着PICO上的BOOTSEL按键,插入usb供电,然后松开。
2)电脑会弹出或识别出一个盘,将刚刚编译的blink.uf2放进新盘内,会自动关闭。
3)pico的led开始闪烁,说明代码已下载成功。
4)可通过调整LED的闪烁时间,来进一步验证是否下载的是自己修改的代码。
至此,就已经装好了VS CODE编译环境,接下来是实现仿真功能。
13、安装MSYS2
1)下载链接
https://www.msys2.org/
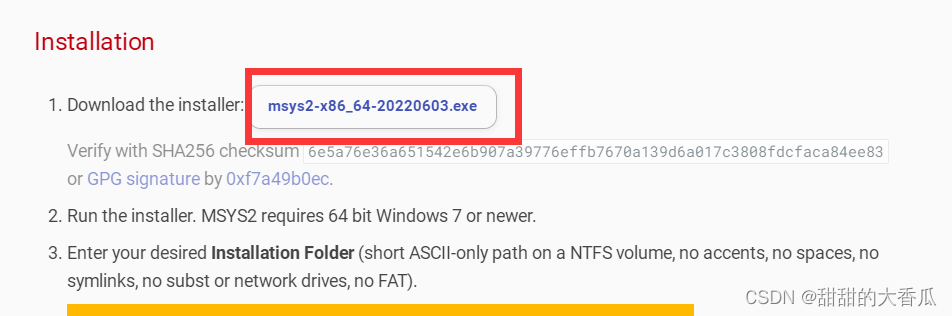
2)安装注意事项
全部默认安装后,在弹出的框内填入
| pacman -Syu |


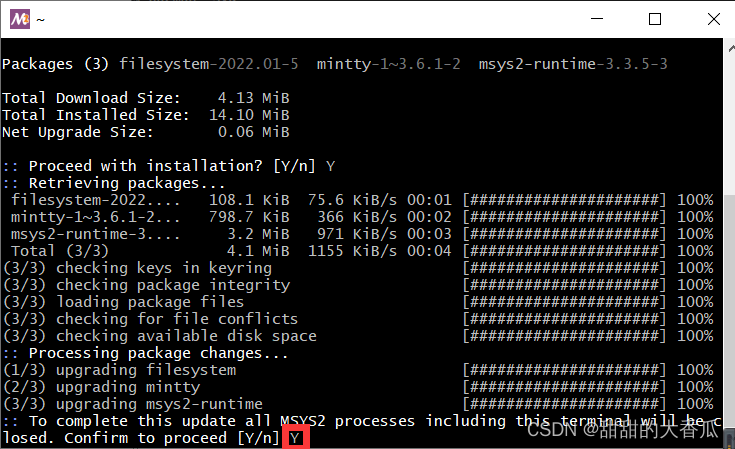
装好后窗口会自动关闭,然后重新打开MSYS2。

输入
| pacman -Su |

安装完成后输入
| pacman -S mingw-w64-x86_64-toolchain git make libtool pkg-config autoconf automake texinfo mingw-w64-x86_64-libusb gcc |

然后要装很久……装好后手动关闭。
14、下载openocd编译文件并执行
1)将香瓜提供的openocd文件夹复制到“D: \GUA_PICO”下
2)打开x64版本的

输入指令(注意是“/”,不是“\”)
| cd D:/GUA_PICO/openocd ./openocd.exe |

15、下载picoprobe固件进pico
1)按着pico的BOOTSEL按键,插入USB,松开按键。等待电脑识别pico为一个盘。
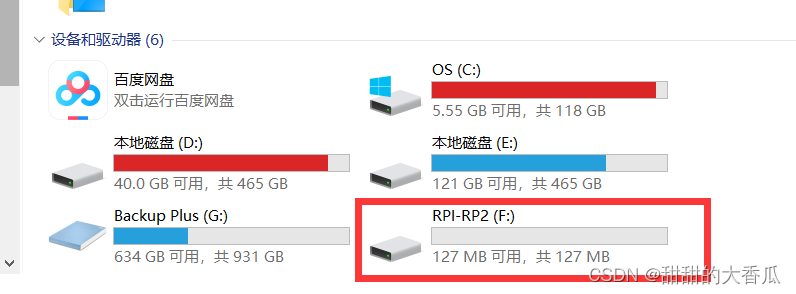
2)将picoprobe固件拖拽进pico识别的盘里,会自动关闭,即下载成功。

16、安装Zadig驱动
1)下载地址
https://zadig.akeo.ie/
2)已下好picoprobe固件的pico,连接电脑。
3)



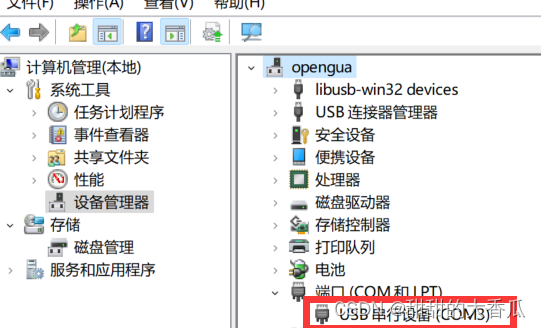
拔插pico的usb,查看驱动是否装好。
这样出现COM口就说明已经装好了。
17、VS debug环境配置
1)在pico-examples目录下右击鼠标, Git Bash Here
2)输入如下指令,会将pico-examples/ide内的文件拷贝到.vscode目录并修改
| cp ide/vscode/launch-raspberrypi-swd.json .vscode/launch.json |

3)用文本打开“D: \GUA_PICO\pico-examples\.vscode”路径下的launch.json文件,并改成如下图所示,图后附上修改后的代码
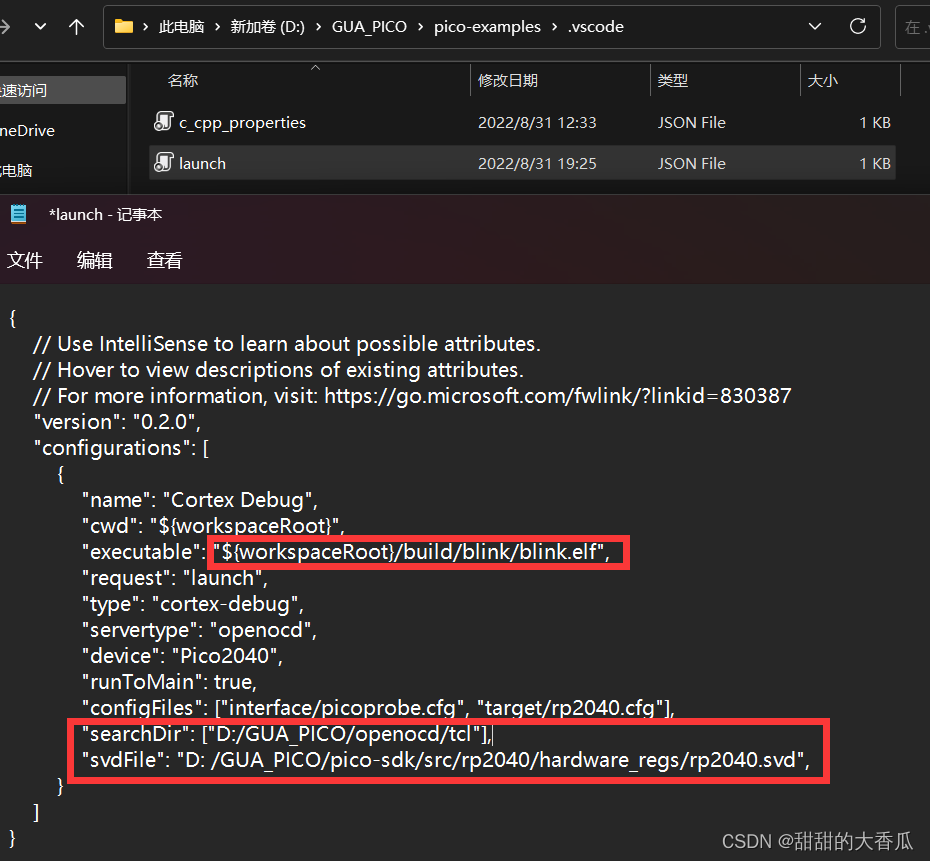
| { // Use IntelliSense to learn about possible attributes. // Hover to view descriptions of existing attributes. // For more information, visit: https://go.microsoft.com/fwlink/?linkid=830387 "version": "0.2.0", "configurations": [ { "name": "Cortex Debug", "cwd": "${workspaceRoot}", "executable": "${workspaceRoot}/build/blink/blink.elf", "request": "launch", "type": "cortex-debug", "servertype": "openocd", "device": "Pico2040", "runToMain": true, "configFiles": ["interface/picoprobe.cfg", "target/rp2040.cfg"], "searchDir": ["D:/GUA_PICO/openocd/tcl"], "svdFile": "D:/GUA_PICO/pico-sdk/src/rp2040/hardware_regs/rp2040.svd", } ] } |
注意searchDir是新加的,需要改成自己电脑中的路径。
4)修改Cortex-Debug插件的配置项目


添加如下路径(根据自己openocd.exe所在路径),修改后关闭,记得点保存

| { "cmake.configureEnvironment": { "PICO_SDK_PATH": "D:\\GUA_PICO\\pico-sdk" }, "cmake.generator": "NMake Makefiles", "cmake.configureOnOpen": true,
"cortex-debug.openocdPath":"D:/GUA_PICO/openocd/openocd.exe", "cortex-debug.gdbPath": "arm-none-eabi-gdb", } |
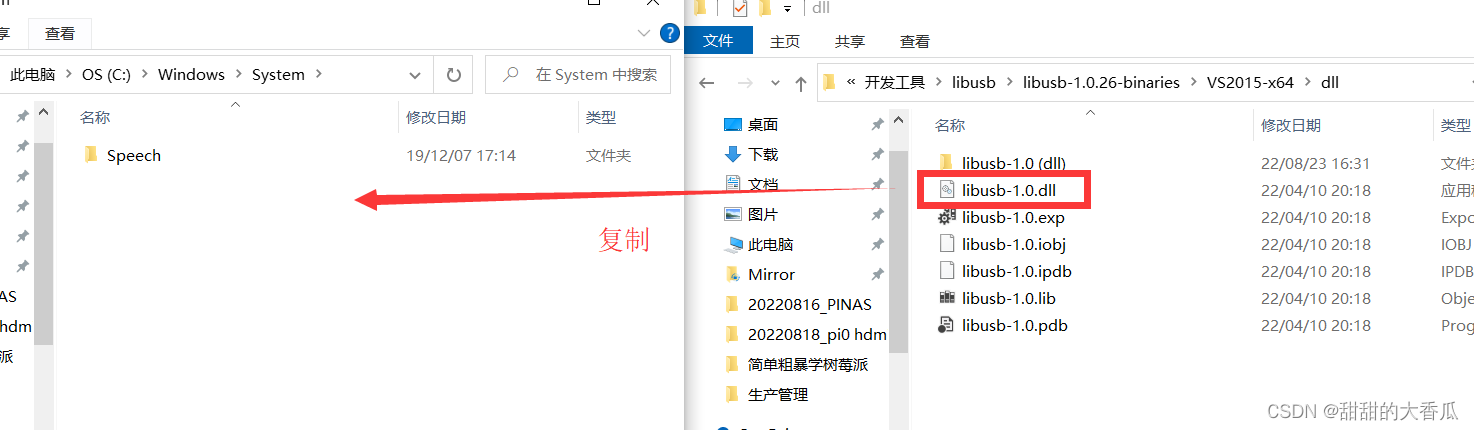
18、下载libusb
1)下载地址
https://libusb.info/

2)复制文件,具体操作如下图
19、下载python27.dll
1、下载并复制“python27.dll”到“C:\Windows\SysWOW64”
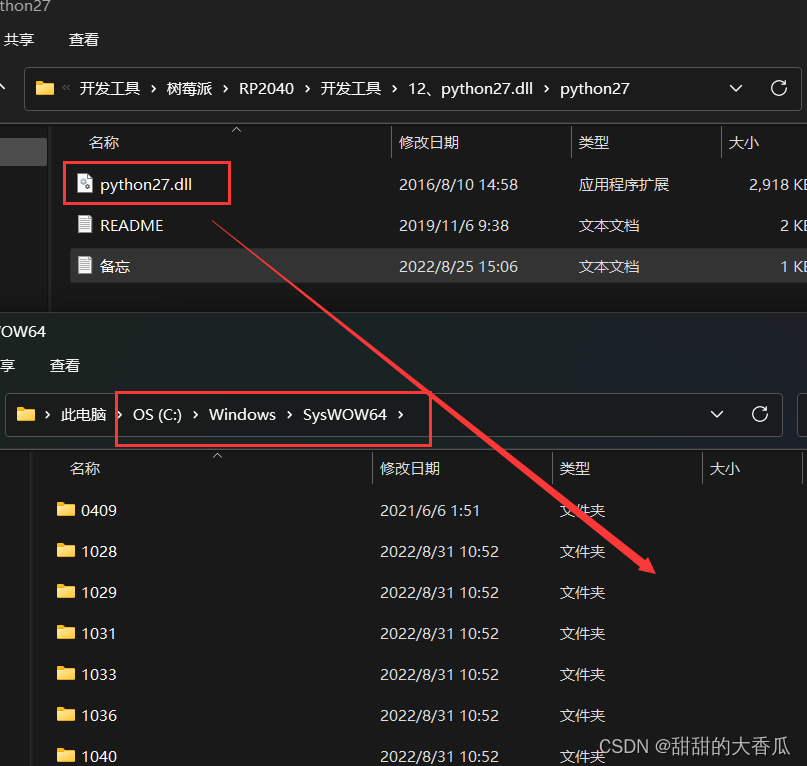
2、使用命令行执行:
| regsvr32 python27.dll -s |


![[oneAPI] 手写数字识别-GAN](https://img-blog.csdnimg.cn/af48294b2b0d438993e6c6130dbd462b.png)