前一篇博客我们提到了,如果要使用算法找到Vbr,通过寻找APD采集信号的噪声方差的剧变点去寻找Vbr是一个不错的方式。此功能的第一步是在FPGA中实现方差的计算,这个我们已经在上一篇博客中实现了。
继上一篇博客之后,感觉过了很久了,原因是最近陷入的FPGA在线调试的无线循环。 万事开头难,自决定自学FPGA以来已3月有余。 刚开始我以为的万事开头难是如何从零开始在板子上跑个程序。 而真正的万事开头难是根据项目的需求,自己写出的第一个具有特定功能的模块。 而就在刚才,我经历了千辛万苦,终于算是把我第一个模块调通了。要不是我拥有我这个年纪本不该拥有的稳重,差点就热泪盈眶啦,因为调试过程确实比较曲折。根据以往的经验,一旦有所感悟一定要立马记下来,好记性不如烂笔头。 但本文绝不是我在这里发表感慨,而是我认为确实有一些值得记录的点。本文主要分为三个部分:1、第一个自写模块的感悟;2、ila在线调试教程;3、ila在线调试的技巧和注意事项。
由于目前处于自学初级阶段,也只会一些简单的调试技巧,后续如果有了新的技巧,要不断的添加更新。
1 第一个自写模块的感悟
1.1 明确模块要实现的目标,输入输出是什么?
先来回顾一下我自己是怎么写出这个模块的,一开始肯定是一脸懵逼的,不知道从何下手。所以我首先思考的是这个模块的目标是什么,更确切一点就是它需要什么输入,然后它能够输出什么。 我们的目标是找到某一个通道的APD击穿电压。
需要的输入是: 时钟、复位信号、主板温度信息、本模块的使能信号(电平使能)、该通道下ADC的采样数据。
需要的输出是: 找到击穿偏压的标志(脉冲信号,就是只有一个时钟周期的高电平)、ADC采集数据的方差(用于调试观测)、通道1 APD击穿时对应的DAC码值。由于要修改APD的偏压,需要控制DAC,而控制DAC的信号在模块外,因此需要在此模块中引出。
module find_vbr(
input wire clk , // 50M
input wire rst_n ,
input wire [15:0] temper_front , // PS端传入的主板温度(16位为1表示数据有效,数据为8位温度数据+90)
input wire find_vbr_ena , // 寻找击穿偏压的使能信号
input wire [31:0] adc_data_ch1 , // CH1 ADC采样数据
output wire vbr_found_flag , // CH1 已找到击穿偏压标志
output reg [15:0] adc_var_ch1 , // CH1 ADC采样数据的方差
output reg [11:0] vbr_hv_code_ch1 , // CH1 击穿偏压对应的码值
output reg [1:0] hv_dac_addr ,
output reg [11:0] hv_dac_data ,
output reg hv_dac_start
);
当然啦,模块的输入输出,是会在模块的实现过程中增删的,这是很正常的事情。所以最开始的时候,也不必想的很全面,我们对这个模块只需要有一个初步的输入输出定义就好啦。
1.2 拆解目标
有了明确的目标,也有了输入输出之后,接下来,就是思考要实现这个目标,我要是实现哪些步骤了。 因此我没先急着写代码,而是先写了点注释。
// 0、什么时候开始
// 1、根据温度获取对应Vbr的码值
// 2、Vbr偏压码值 - 0x50
// 3、步长0x08变化偏压码值,设置后延迟相应的时间让设置的偏压稳定
// 4、待当前偏压稳定后,计算信号的方差
// 5、判断当前信号底噪方差与上一个码值对应的信号底噪方差(默认为0)的差值是否超过阈值(30)
// 6、如果差值超过阈值则Flag拉高,如果差值未超过阈值,则继续加偏压,直到超过阈值为止
// 7、什么时候结束
要实现我的目标,那就按照上述步骤一步一步实现就可以了。由于以前C语言编写的比较多,潜意识里都是串行思路,因此在思考和拆解大目标的时候,习惯用的是串行思维。 在后续的开发过程中要注意习惯并行思维的应用。当然了,即使是到写博客的现在呢,我仍然是认为这个模块就应该用串行的思维来思考和拆解。 只是警醒一下自己,不要忘记有并行的思维。
1.3 实现目标-硬着头皮写
即使明确了目标,也拆解了目标,对于一个FPGA初学者来讲,要动手去从0到1的实现,也是需要很大的魄力的。 开发板的例程,你有得抄,更注重理解。而现在你真要上了, 没有代码给你抄(上一篇博客我们其实是参考了C站的C知道给出的答案,有点走捷径的感觉),你得自己尝试着写了。 这里就只能硬着头皮写了,没有捷径,没有任何技巧。当然了,硬着头皮写的前提是基于开发板的基础学习还是要扎实的,不然你头发掉光了也是写不出来的,多少有点自欺欺人了。
硬着头皮写呢,有时候也会陷入一种瞻前顾后,犹豫不决,害怕失败的感觉,迟迟不敢往下写,这是正常的。 我可以肯定的告诉你,你第一把写出来的程序,百分之百有问题。 你根本不用担心失败不失败的问题,因为肯定有问题。
你先写出来,我们主要追求的是一个完整性。
别看功能也不复杂,硬着头皮完整写完,这个步骤我基本上花了1周的时间。 调试我花了两个周,哈哈。 在后面的调试过程中,我又做了很多修改。 我觉得其中值得注意的一点就是, 你要在草稿纸上简单画一画时序图, 你希望你的这些信号的时序图长什么样子。 这是你在实现的时候思考和关注的问题。后续有在调试的时候,也要看实测抓出的波形是不是如你设计的那样。
我把最终成功运行的代码贴出来吧,供参考和备忘。
`timescale 1ns / 1ps
module find_vbr(
input wire clk , // 50M
input wire rst_n ,
input wire [15:0] temper_front , // PS端传入的主板温度(16位为1表示数据有效,数据为8位温度数据+90)
input wire find_vbr_ena , // 寻找击穿偏压的使能信号
input wire [31:0] adc_data_ch1 , // CH1 ADC采样数据
output wire vbr_found_flag , // CH1 已找到击穿偏压标志
output reg [15:0] adc_var_ch1 , // CH1 ADC采样数据的方差
output reg [11:0] vbr_hv_code_ch1 , // CH1 击穿偏压对应的码值
output reg [1:0] hv_dac_addr ,
output reg [11:0] hv_dac_data ,
output reg hv_dac_start
);
//==================================================================
// Parameter define
//==================================================================
parameter THRESHOLD = 50;
parameter MAX_WAIT_COUNT = 100_000_000 - 1; // 20ns x 100_000_000 = 2 s
parameter HVCODE_STEP = 8; // 偏压码值变化8,偏压实际变化约等于0.25V
parameter DEFAULT_HVCODE = 12'h4E0; // 默认APD偏压码值(修改后可设置默认偏压)
parameter APD_SET_DELAY = 32'd500_000; // 设置单通道APD后等待时间
parameter APD_SET_WIDE = 32'd500; // 设置使能脉宽
// parameter THRESHOLD = 30;
// parameter MAX_WAIT_COUNT = 20 - 1; // 20ns x 100_000_000 = 2 s
// parameter HVCODE_STEP = 8; // 偏压码值变化8,偏压实际变化约等于0.25V
// parameter DEFAULT_HVCODE = 12'h4E0; // 默认APD偏压码值(修改后可设置默认偏压)
// parameter APD_SET_DELAY = 32'd20; // 设置单通道APD后等待时间
// parameter APD_SET_WIDE = 32'd10; // 设置使能脉宽
//==================================================================
// Internal Signals
//==================================================================
(* MARK_DEBUG="true" *) wire [11:0] rom_hv_code; // rom查找的APD偏压码值 官方给出的击穿电压再减去2V所对应的码值
(* MARK_DEBUG="true" *) reg [27:0] wait_cnt; // 延迟计数变量
(* MARK_DEBUG="true" *) wire [11:0] pre_hv_code;
(* MARK_DEBUG="true" *) reg [11:0] cur_hv_code;
(* MARK_DEBUG="true" *) reg is_init;
(* MARK_DEBUG="true" *) reg is_finish;
(* MARK_DEBUG="true" *) reg [31:0] apd_set_wait_cnt; //自动设置状态停留计数
(* MARK_DEBUG="true" *) reg is_hv_can_be_set; // 偏压是否进入可设置状态
(* MARK_DEBUG="true" *) reg is_hv_can_be_wait; // 偏压是否进入等待响应状态
(* MARK_DEBUG="true" *) reg is_hv_set_completed; // 偏压设置是否已完成
(* MARK_DEBUG="true" *) wire [15:0] cur_var; // 当前信号方差
(* MARK_DEBUG="true" *) wire var_available; // 当前信号方差可用
(* MARK_DEBUG="true" *) reg [15:0] his_var; // 历史信号方差
(* MARK_DEBUG="true" *) reg [15:0] delta_var; // 方差变化量
// (* MARK_DEBUG="true" *) reg rst_n;
// reg [7:0] rst_counter; // 默认为0
// parameter RESET_COUNT_MAX = 100;
// always @(posedge clk) begin
// if (rst_counter < RESET_COUNT_MAX) begin
// rst_counter <= rst_counter + 1;
// end
// else if(rst_counter == RESET_COUNT_MAX)begin
// rst_counter <= rst_counter;
// end
// else begin
// rst_counter <= 'd0;
// end
// end
// always @(posedge clk) begin
// if(rst_counter==RESET_COUNT_MAX) begin
// rst_n <= 1'b1;
// end else begin
// rst_n <= 1'b0;
// end
// end
//----------------------------- pre_hv_code -----------------------------
// assign pre_hv_code = (temper_front[15] == 1'b1) ? rom_hv_code:DEFAULT_HVCODE; // 验证温度数据是否有效(当disable拉高时,上电设置默认偏压值)
assign pre_hv_code = DEFAULT_HVCODE;
APD_rom R_APD_rom ( // 通过Rom读取当前温度对应的官方击穿偏压 - 2V所对应的码值
.a(temper_front[7:0]), // input wire [7:0] a
.spo(rom_hv_code) // output wire [11:0] spo
);
//----------------------------- is_init -----------------------------
always @(posedge clk or negedge rst_n) begin
if (rst_n == 1'b0) begin
is_init <= 1'b0;
end
else if(find_vbr_ena == 1'b1 && is_init == 1'b0) begin // 当前条件下,初始化要设置的偏压码值current_HVCODE
is_init <= 1'b1;
end
else begin
is_init <= is_init;
end
end
//----------------------------- is_init -----------------------------
always @(posedge clk or negedge rst_n) begin
if (rst_n == 1'b0) begin
is_finish <= 1'b0;
end
else if(var_available==1'b1 && delta_var >= THRESHOLD) begin // 当前条件下,初始化要设置的偏压码值current_HVCODE
is_finish <= 1'b1;
end
else begin
is_finish <= is_finish;
end
end
//----------------------------- is_finish ----------------------------- // 若方差已计算,且方差变化量大于等于阈值,则结束。
// assign is_finish = (var_available==1'b1 && delta_var >= THRESHOLD) ? 1'b1:1'b0;
//----------------------------- cur_hv_code -----------------------------
always @(posedge clk or negedge rst_n) begin
if (rst_n == 1'b0) begin
cur_hv_code <= DEFAULT_HVCODE;
end
else if(find_vbr_ena == 1'b1 && is_init == 1'b0) begin
cur_hv_code <= pre_hv_code - 12'h040;
end
else if( (is_hv_set_completed == 1'b1) && (var_available == 1'b1) && (is_finish == 1'b0) && cur_hv_code < 12'h578) begin // 若已初始化,方差已计算,且未结束,则偏压码值按固定步长增长进入下一轮。
cur_hv_code <= cur_hv_code + HVCODE_STEP;
end
else begin
cur_hv_code <= cur_hv_code;
end
end
//----------------------------- is_hv_can_be_set -----------------------------
always @(posedge clk or negedge rst_n) begin
if (rst_n == 1'b0) begin
is_hv_can_be_set <= 1'b0;
end
else if(find_vbr_ena == 1'b1 && is_init == 1'b0) begin // 初始化后,isHvCanBeSet被拉高
is_hv_can_be_set <= 1'b1;
end
else if( (is_hv_set_completed == 1'b1) && (var_available == 1'b1) && (is_finish == 1'b0)) begin // 若已初始化,方差已计算,且未结束,isHvCanBeSet被拉高
is_hv_can_be_set <= 1'b1;
end
else if ( (is_hv_can_be_set ==1'b1) && (is_hv_can_be_wait==1'b1)) begin
is_hv_can_be_set <= 1'b0;
end
else begin
is_hv_can_be_set <= is_hv_can_be_set;
end
end
//----------------------------- hv_dac_start+hv_dac_data ----------------------------- // 设置偏压操作
always @(posedge clk or negedge rst_n) begin
if (rst_n == 1'b0) begin
hv_dac_addr <= 2'd0;
hv_dac_start <= 1'b0;
apd_set_wait_cnt<= 'd0;
end
else if(is_hv_can_be_set == 1'b1)begin
if (apd_set_wait_cnt > APD_SET_DELAY / 2) begin
hv_dac_start <= 1;
end
if (apd_set_wait_cnt > (APD_SET_DELAY / 2) + (APD_SET_WIDE / 2)) begin
hv_dac_data <= cur_hv_code;
end
if (apd_set_wait_cnt > APD_SET_DELAY / 2 + APD_SET_WIDE) begin
hv_dac_start <= 'd0;
end
if (apd_set_wait_cnt > APD_SET_DELAY) begin
apd_set_wait_cnt <= 'd0;
end
else begin
apd_set_wait_cnt <= apd_set_wait_cnt + 1'b1;
end
end
end
//----------------------------- is_hv_can_be_wait -----------------------------
always @(posedge clk or negedge rst_n) begin
if (rst_n == 1'b0) begin
is_hv_can_be_wait <= 1'b0;
end
else if (apd_set_wait_cnt > APD_SET_DELAY) begin
is_hv_can_be_wait <= 1'b1;
end
else if (is_hv_can_be_wait == 1'b1 && wait_cnt == MAX_WAIT_COUNT) begin
is_hv_can_be_wait <= 1'b0;
end
else begin
is_hv_can_be_wait <= is_hv_can_be_wait;
end
end
//----------------------------- wait_cnt ----------------------------- // 计数两秒
always @(posedge clk or negedge rst_n) begin
if (rst_n == 1'b0) begin
wait_cnt <= 'd0;
end
else if(is_hv_can_be_wait == 1'b1) begin
if (wait_cnt == MAX_WAIT_COUNT) begin
wait_cnt <= 'd0;
end
else begin
wait_cnt <= wait_cnt + 1'b1;
end
end
else begin
wait_cnt <= 'd0;
end
end
//----------------------------- is_hv_set_completed -----------------------------
always @(posedge clk or negedge rst_n) begin
if (rst_n == 1'b0) begin
is_hv_set_completed <= 1'b0;
end
else if (is_hv_can_be_wait == 1'b1 && wait_cnt == MAX_WAIT_COUNT) begin // 偏压设置完成后,计数两秒等待结束,isHvSetCompleted被拉高
is_hv_set_completed <= 1'b1;
end
else if (is_hv_set_completed == 1'b1 && var_available == 1'b1) begin // 方差计算完成后,isHvSetCompleted被拉低
is_hv_set_completed <= 1'b0;
end
else begin
is_hv_set_completed <= is_hv_set_completed;
end
end
//----------------------------- var_compute -----------------------------
var_compute var_calculator (
.clk ( clk ) ,
.rst_n ( rst_n ) ,
.data_in ( adc_data_ch1[7:0] ) ,
.valid_in ( is_hv_set_completed ) ,
.variance ( cur_var ) ,
.valid_out ( var_available )
);
//----------------------------- delta_var ----------------------------- // 方差变化量
//assign delta_var = (var_available == 1'b1 && cur_var > his_var) ? (cur_var - his_var) : 'd0;
//----------------------------- vbr_found_flag ----------------------------- // 是否找到击穿偏压
assign vbr_found_flag = (delta_var >= THRESHOLD) ? 1'b1 : 1'b0;
//----------------------------- his_var -----------------------------
always @(posedge clk or negedge rst_n) begin
if (rst_n == 1'b0) begin
his_var <= 'd0;
end
else if(var_available == 1'b1) begin // 如果当前偏压并不是击穿偏压,则记录历史方差,以便于后续计算方差变化量
his_var <= cur_var;
end
else begin
his_var <= his_var;
end
end
//----------------------------- delta_var -----------------------------
always @(posedge clk or negedge rst_n) begin
if (rst_n == 1'b0) begin
delta_var <= 'd0;
end
else if(var_available == 1'b1) begin // 如果当前偏压并不是击穿偏压,则记录历史方差,以便于后续计算方差变化量
if (cur_var >= his_var) begin
delta_var <= cur_var - his_var;
end
else begin
delta_var <= 'd0;
end
end
else begin
delta_var <= delta_var;
end
end
endmodule
1.4 前仿真和后仿真
硬着头皮写完之后呢,就是进行仿真了,有经验的老师傅说,一般来讲前仿真(功能仿真)通过了,在线就不会有太大的问题。 而后仿真呢,是最接近与上机跑的真实情况的,但是后仿真编译的时间也比较长,所以很少有人搞后仿真的。 Modelsim搞仿真还是有一套的,再次安利一波。 在讲仿真的这里,我特别想强调的一个点,就是一定要尽量模拟真实的情况。 否则,你所认为的仿真“通过”了,就很片面,局限。 仿真这里一定要考虑全面。 我就是吃了这方面的亏, 在上一篇博客,我实现了一个方差计算小模块,我用的输入数据是0~255,这个数据仿真是没问题的(V2.0)。 但是我在用真机调试的时候,就出现了问题。 一方面在计算方差的时候,位宽的问题,我也没有考虑周到,一方面方差的计算精度,我也没有考虑到,最后优化后都是V4.0了。由于仿真的粗心,在调更大模块的时候,我的先验知识就让我不要去考虑是不是方差计算模块出了问题,而是去考虑其他地方的问题,但是恰巧就是方差模块出了问题,这样就导致了无法准确定位的问题真正的位置。 所以在仿真的时候, 要考虑全面,细致。 比如我们的真实数据是在7f和80之间来回变化,那么我们如何在Testbench代码中把真实的数据模仿出来,这个是要好好考虑的问题(就在写博客的时候我已经想到如何实现了,比如根据求计数器余数的办法给出是7f是80,所以别畏难,肯定有办法)。 在调试的时候,由于一直无法定位问题,后仿真我也测试过,也是“通过”的。但是上机还是通不过,我还怀疑是板子硬件有问题,还去换了板子测试,结果是一样的。
所以仿真的全面和细致真的很重要,另外,对于所谓的仿真“通过”,是要保持一颗怀疑的心的。
1.5 对自己吹一口彩虹屁
之前在调试的时候,总是找不到问题,也请教了前辈,但是仍然没有解决问题。 他们就说我的这种实现方式(没有用状态机)有点不稳定,很容易出问题。 我当时也认同没有用状态机可能程序没那么稳定的观点。 我也想过要不就用状态机重新实现一遍。但如果让我稀里糊涂的重构用状态机实现,我心里是不甘心,不服气的。即使我的实现方式有问题,那我也一定要找到我目前这种实现方法的问题在那里,不然不明不白的重写我是无法接受的。 我的确也没有重构,通过两星期持续的坚持调试,我最终定位到了问题,并且也解决了。 戏剧的点是,其实根本就不是我实现方式的问题,而是方差子模块的问题。 因此我要感谢自己,感谢自己的不甘心,感谢自己的不服气。学习FPGA编程的态度,当如是也!
2 ila在线调试教程
ila是一种FPGA常用的在线调试方式,和DSP、STM32的断点调试不同,ila是通过抓取信号来判断你的程序是否正常运行的。学习ila我是看了B站的一个up主的视频的:Vivado在线调试工具ILA使用教程【小梅哥FPGA】_哔哩哔哩_bilibili,全程1个半小时,很受用。如视频所说的,用ila实现在线调试的方式有好几种,在这里呢,我把我最近用的这种方式记录下来,供大家和未来的自己参考。
第一步:
在所有在线调试需要抓取的变量前 添加(* MARK_DEBUG="true" *)
(* MARK_DEBUG="true" *) wire [11:0] rom_hv_code; // rom查找的APD偏压码值 官方给出的击穿电压再减去2V所对应的码值
(* MARK_DEBUG="true" *) reg [27:0] wait_cnt; // 延迟计数变量
(* MARK_DEBUG="true" *) wire [11:0] pre_hv_code;
(* MARK_DEBUG="true" *) reg [11:0] cur_hv_code;
(* MARK_DEBUG="true" *) reg is_init;
(* MARK_DEBUG="true" *) reg is_finish;
(* MARK_DEBUG="true" *) reg [31:0] apd_set_wait_cnt; //自动设置状态停留计数
第二步:
综合电路
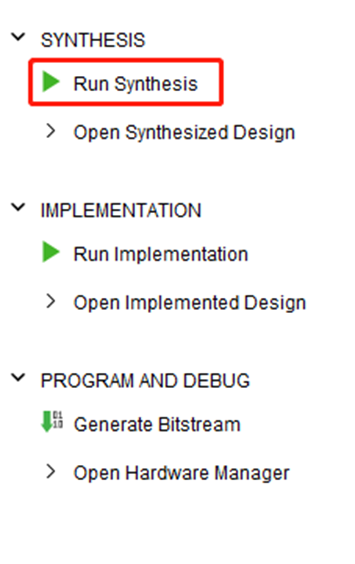
第三步:
打开综合设计

正常的话,会等待一段时间
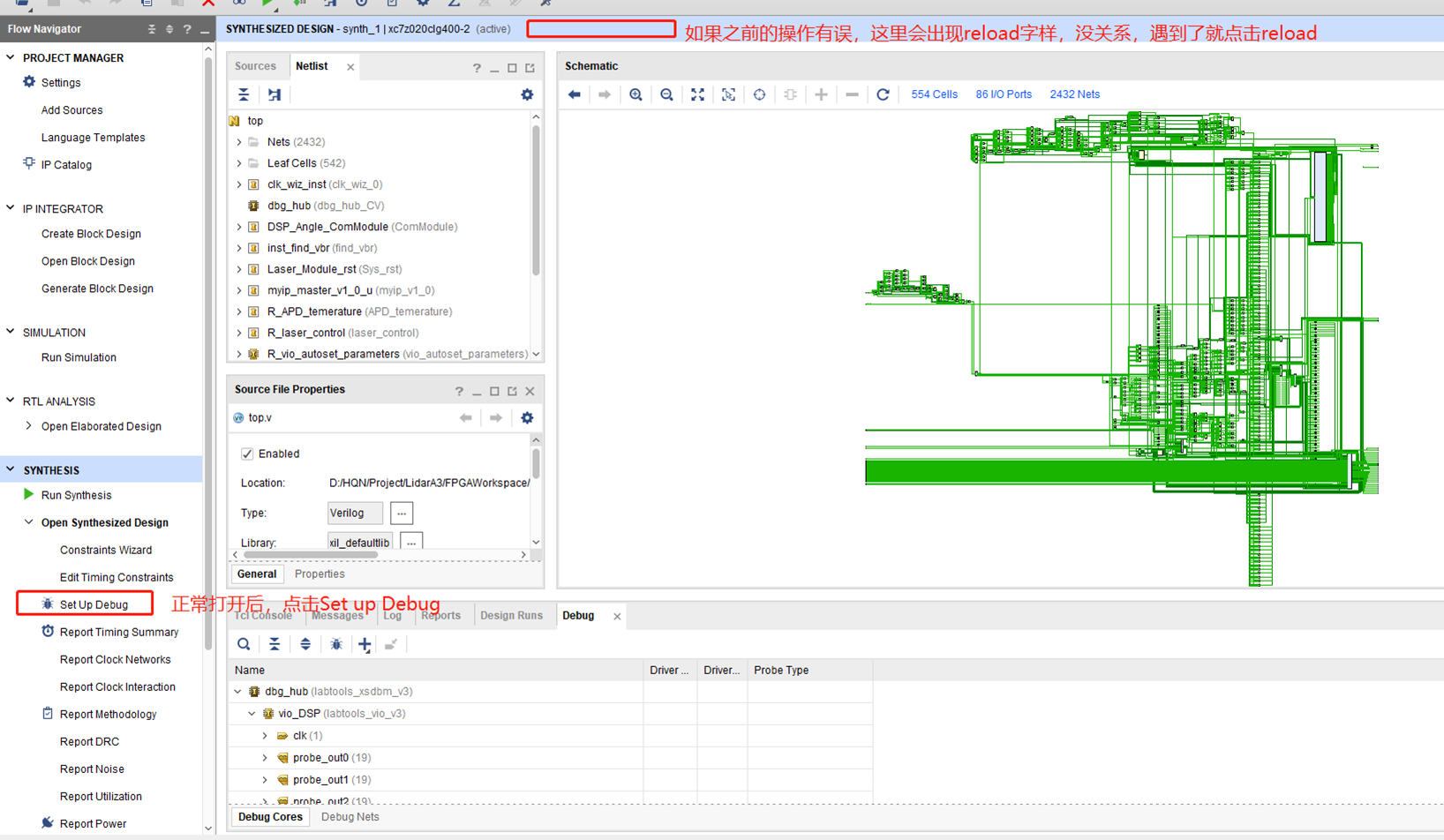
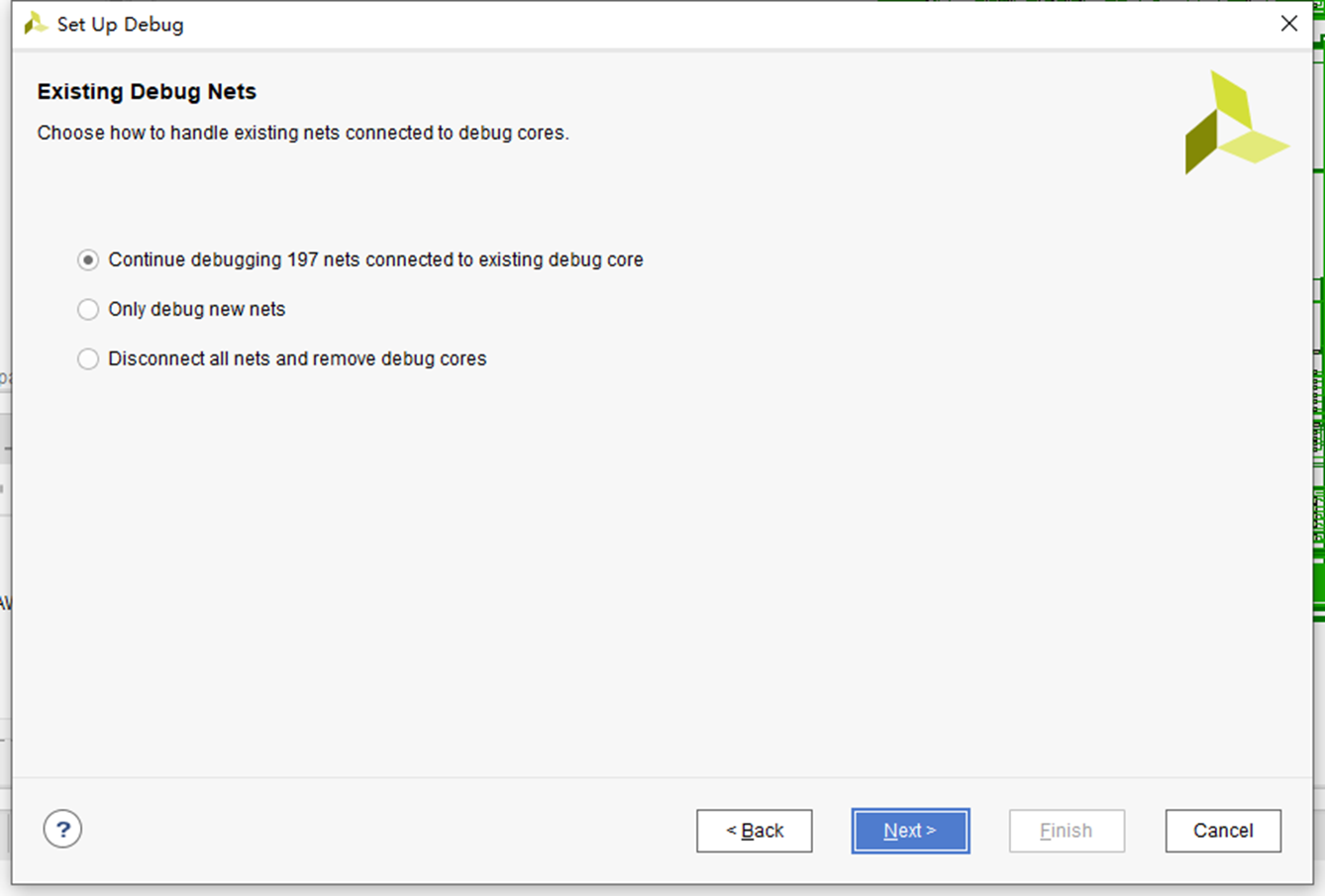
第四步:
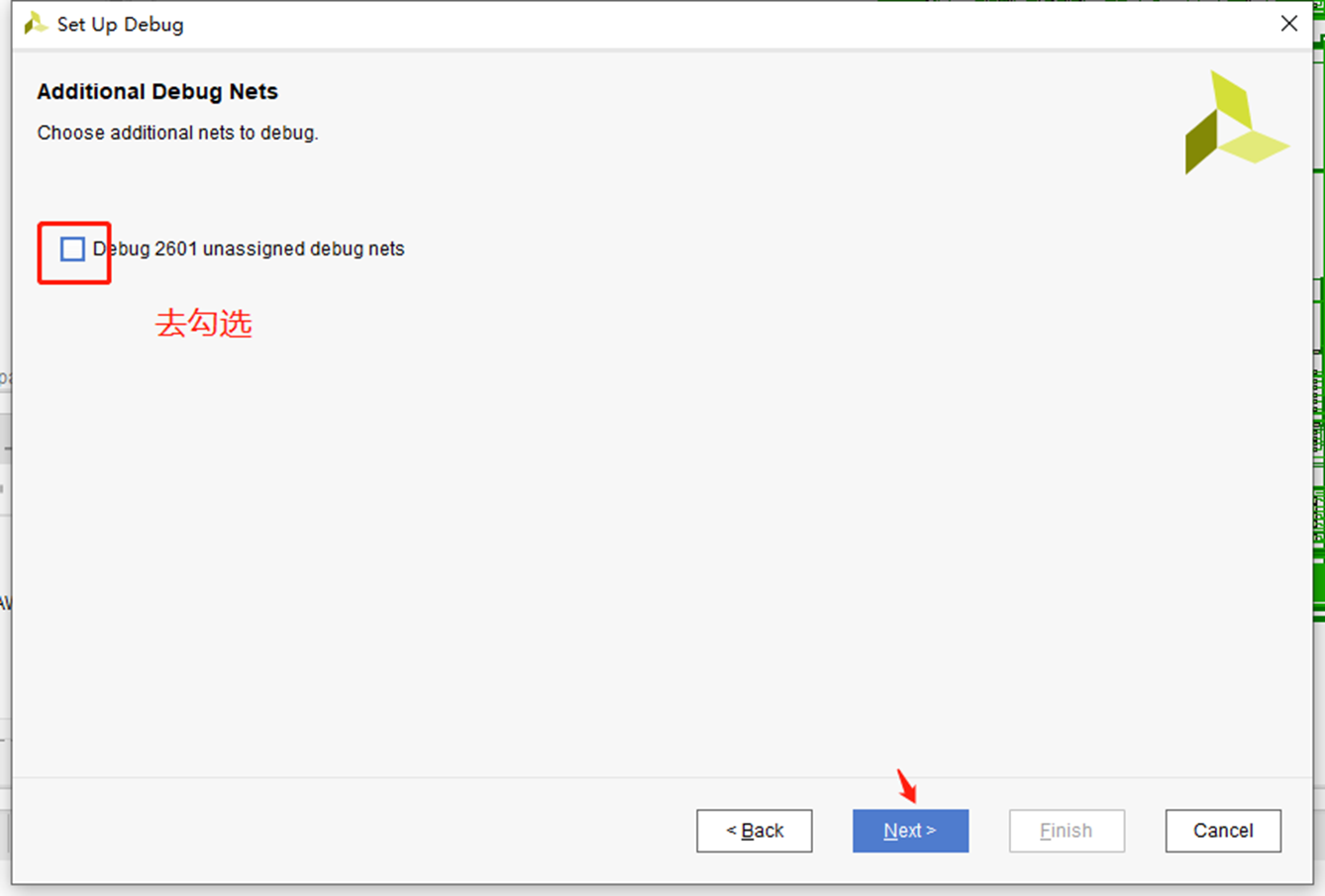
第五步:
Next三下

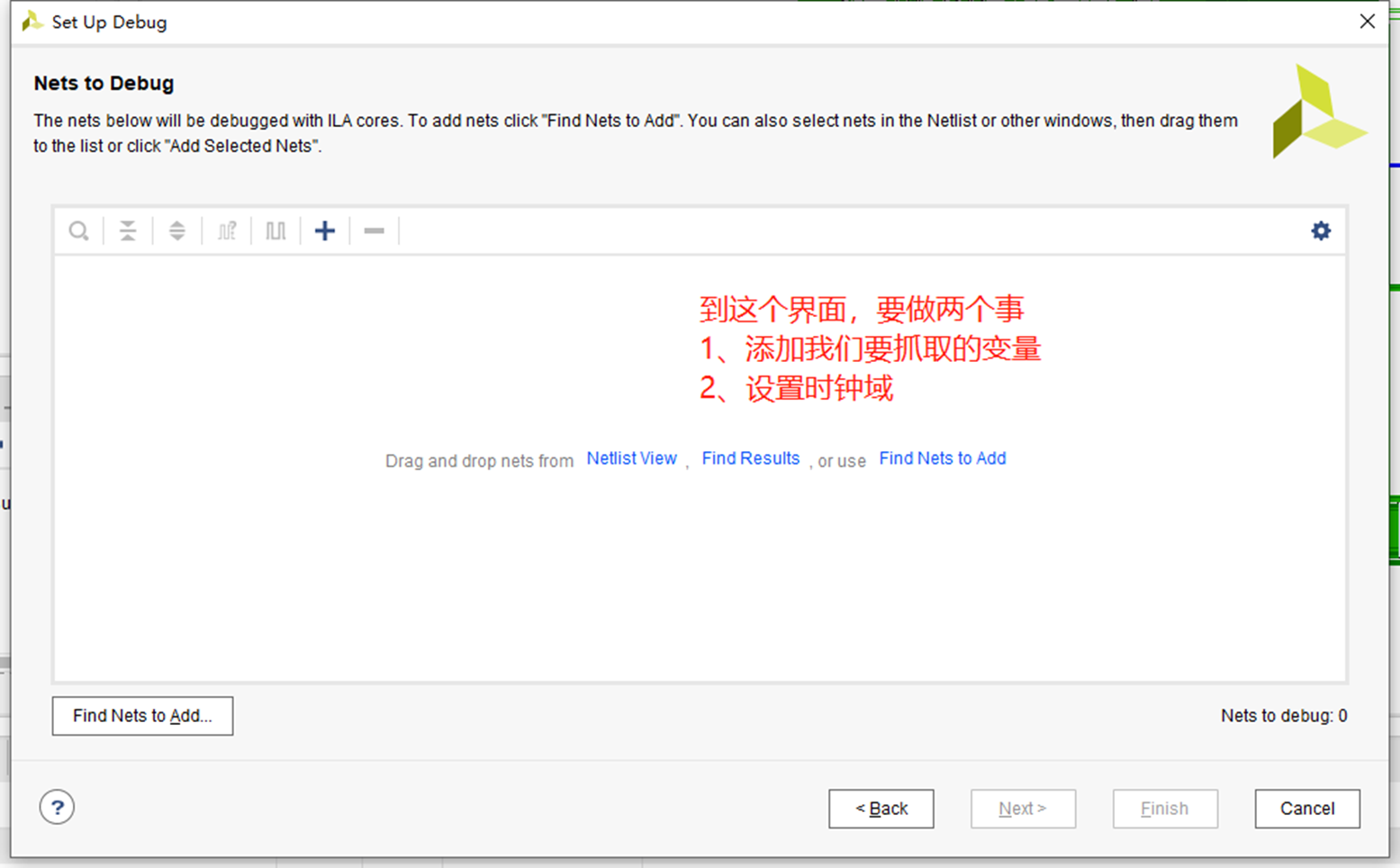
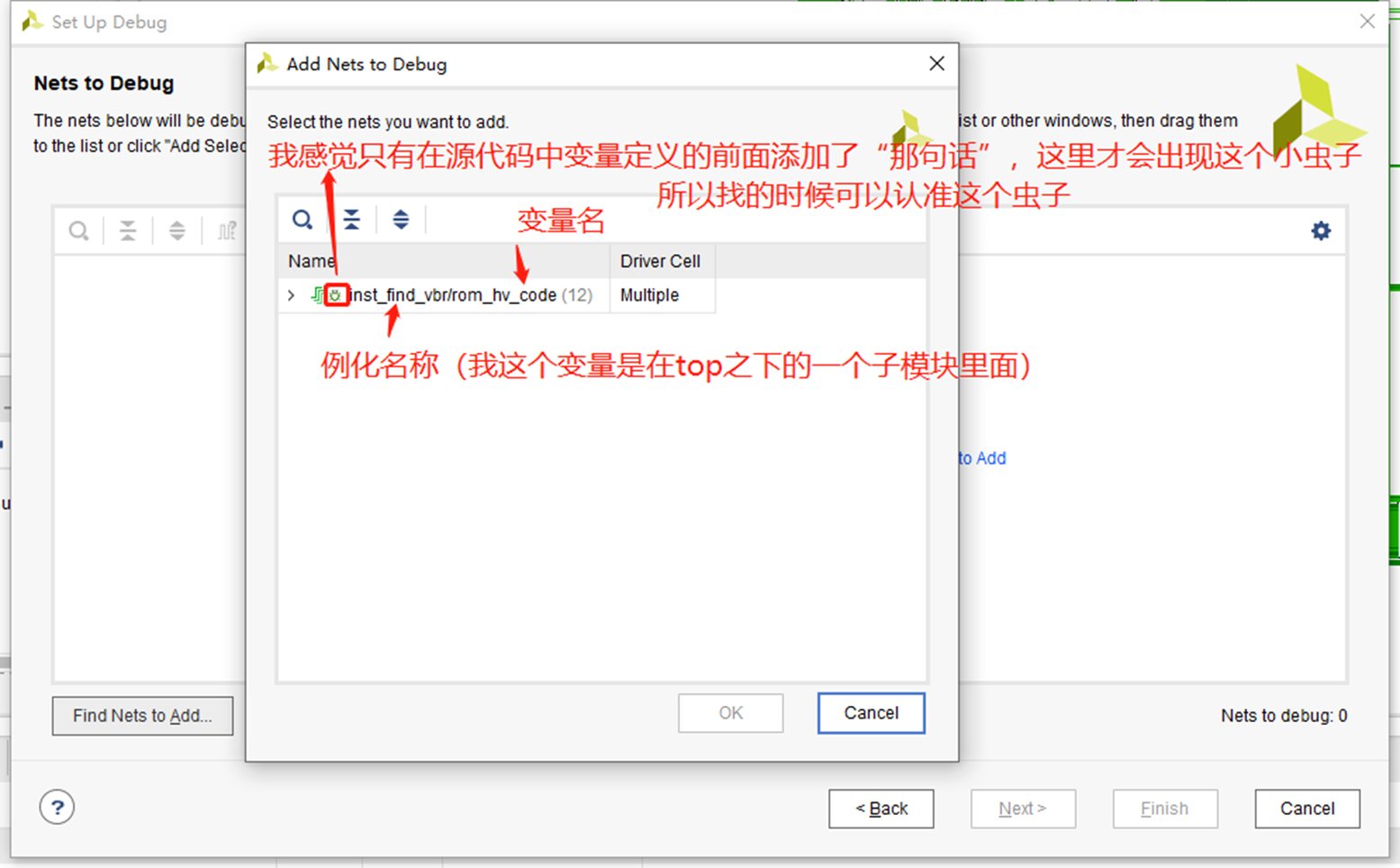
第六步:
添加带观测变量并设置时钟域



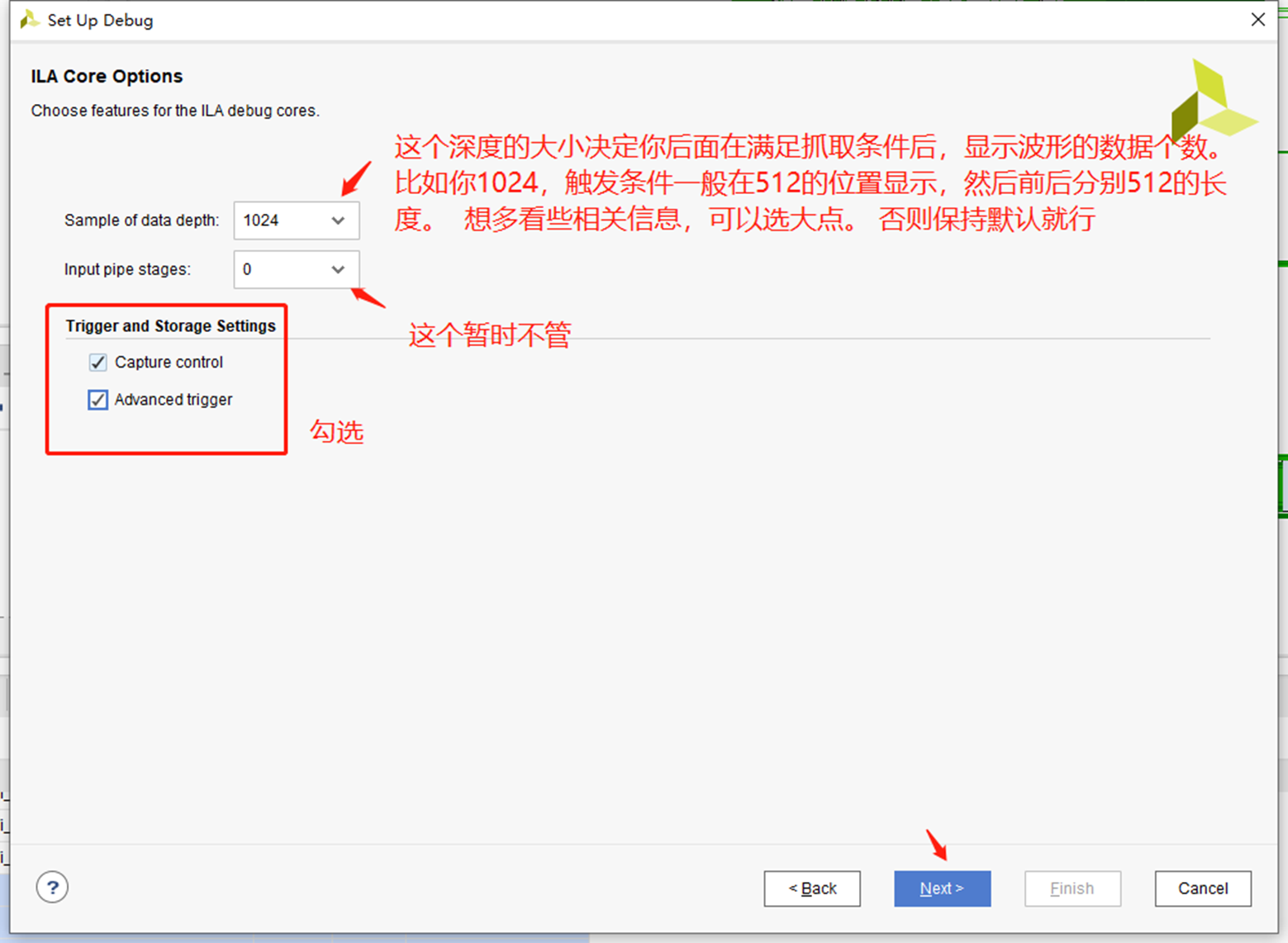
第七步:
选择采样的数据深度、勾选捕获和触发。
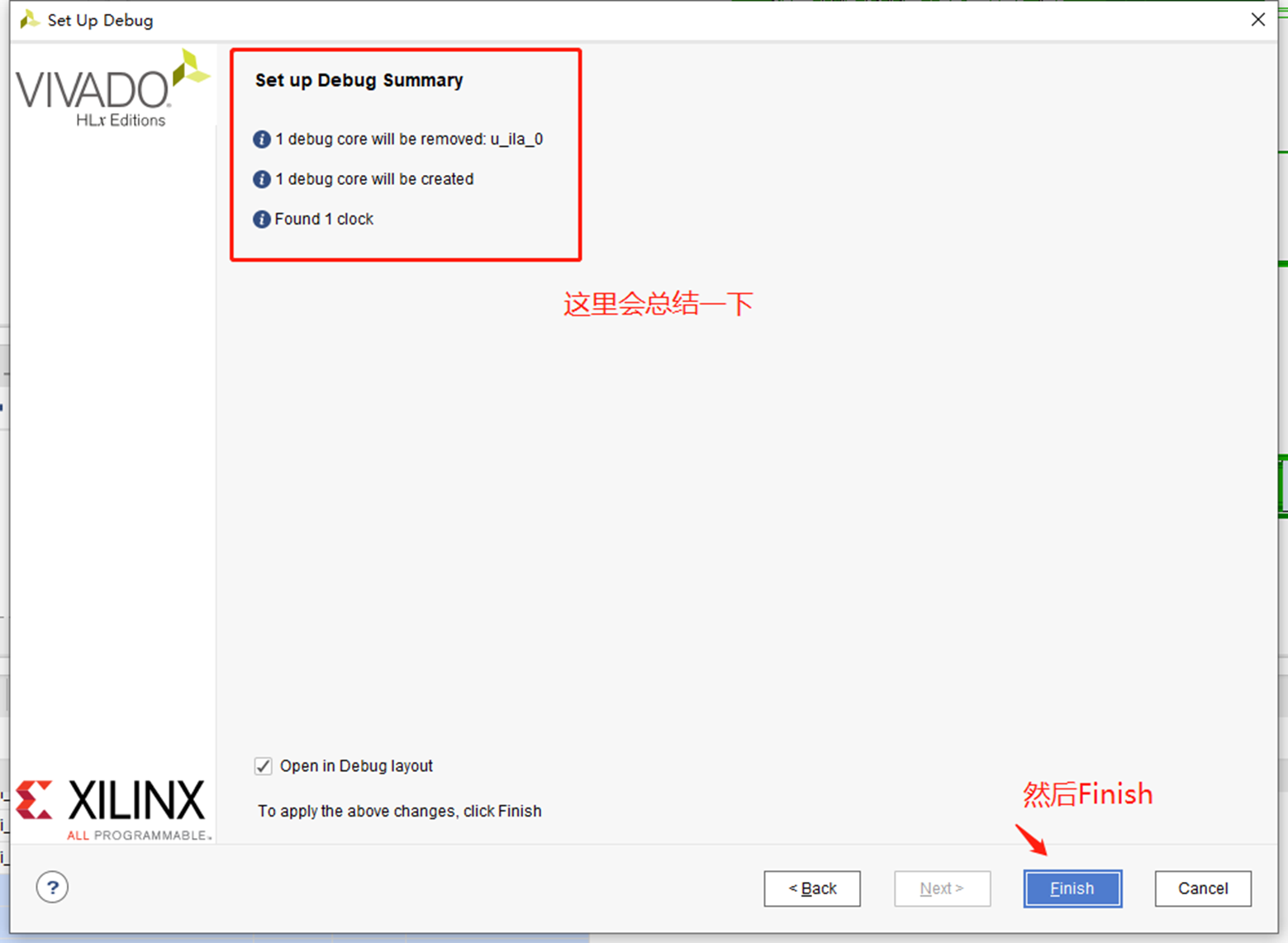
第八步:
Finish
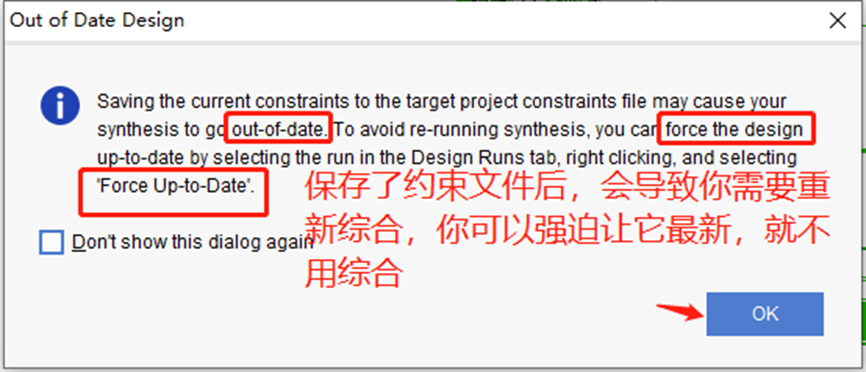
第九步:
后面会出现一堆提示,一路OK下去。



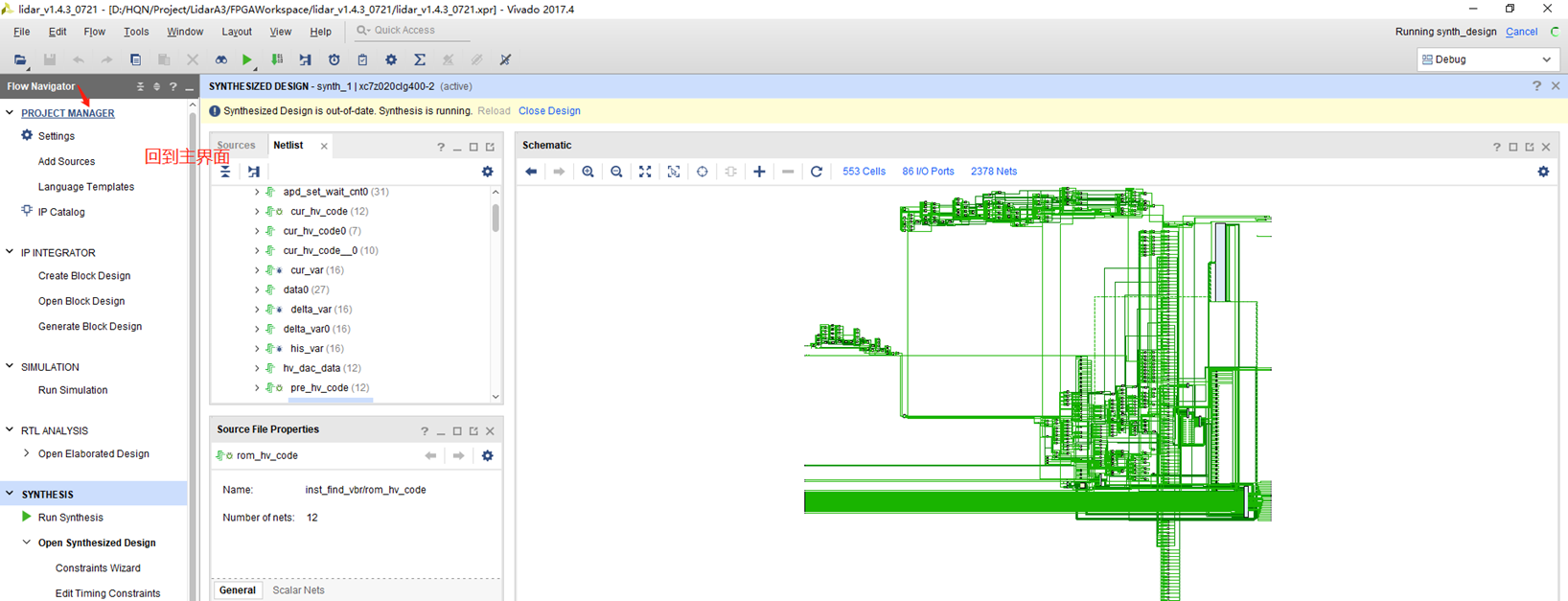
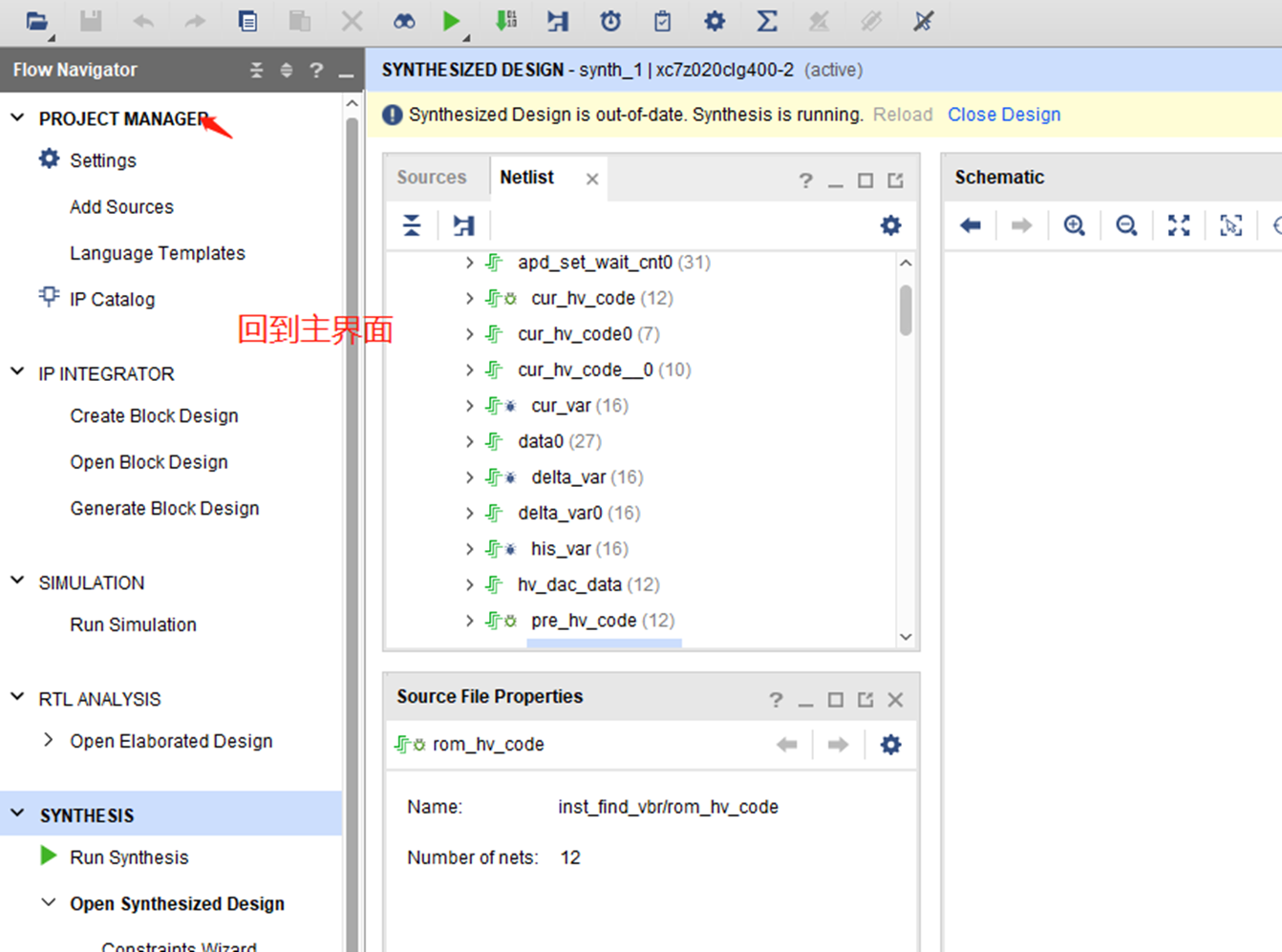
第十步:
重新综合、布线、生成bit文件,以便后续烧写程序,在线调试

3 ila在线调试的技巧和注意事项
在工程比较大的时候,在vivado版本比较低的时候,在你不熟悉vivado的时候,你去用ila在线调试,你会遇到各种奇葩的问题,解决办法也很奇葩。 只要你动了项目里微小的东西,比如加个IP核,减个IP核,甚至哪怕你源代码中多了一个空格。同样的工程,以前编译能够通过的,现在很有可能编译通不过了。 编译通不过的原因一般出现时布局布线上面,这里面有很多随机性。 同样地,你在ila调试的时候,你增加一个观测变量,你删除一个观测变量。 都有可能造成编译无法通过,最终无法生成bit文件。
调试技巧1
当你编译通不过了,你尝试删除几个ila的观测变量,如果再通不过,那就再删除几个。 你这次删除后编译通过了,下次编译你再慢慢加上去,也可以的。
调试技巧2
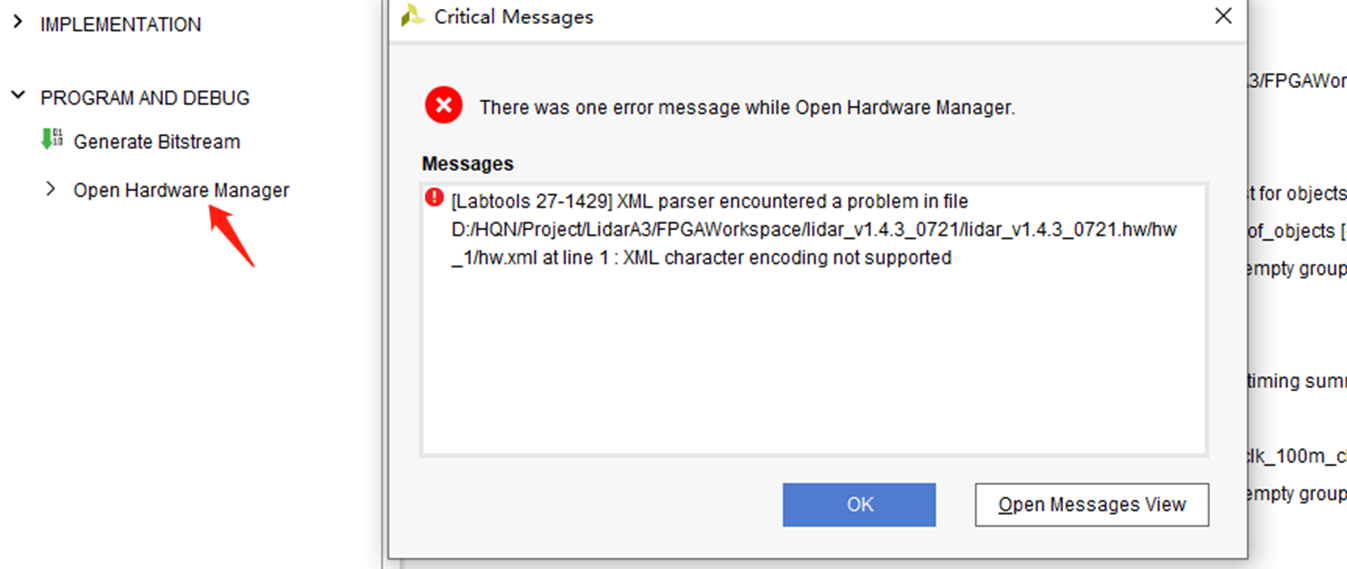
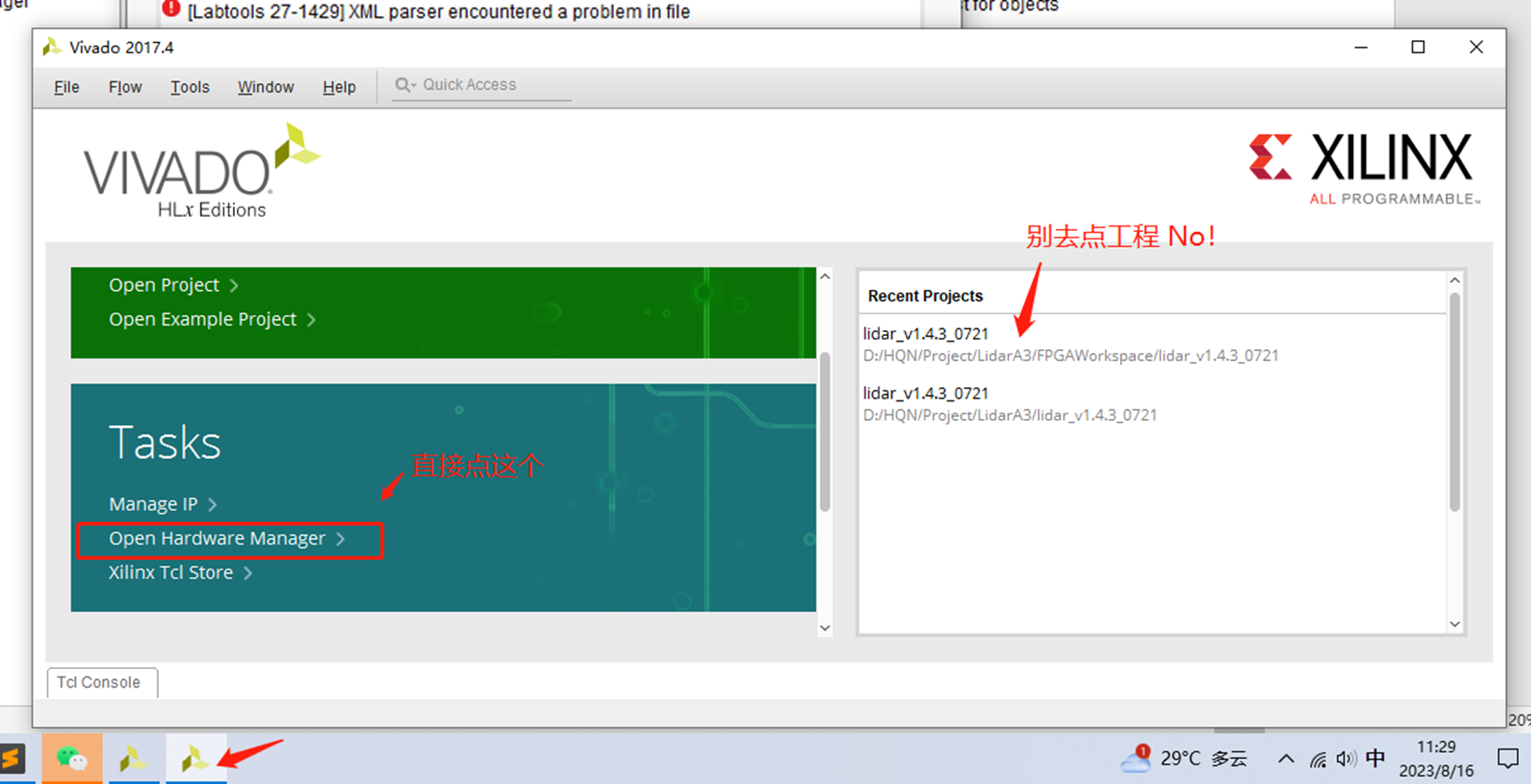
如果编译通过了,硬件上电正常,仿真器连接都正常,但是,你始终没办法打开你的硬件。 解决办法可以是:重新打开另一个vivado
调试技巧3
正常的调试流程,也稍微说一下
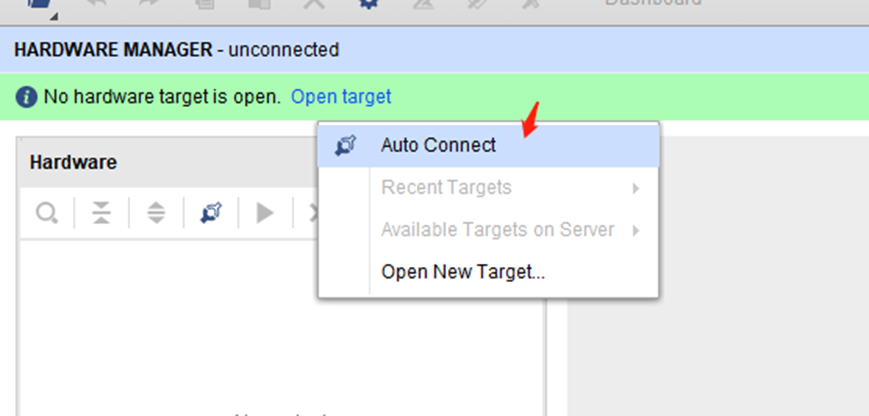
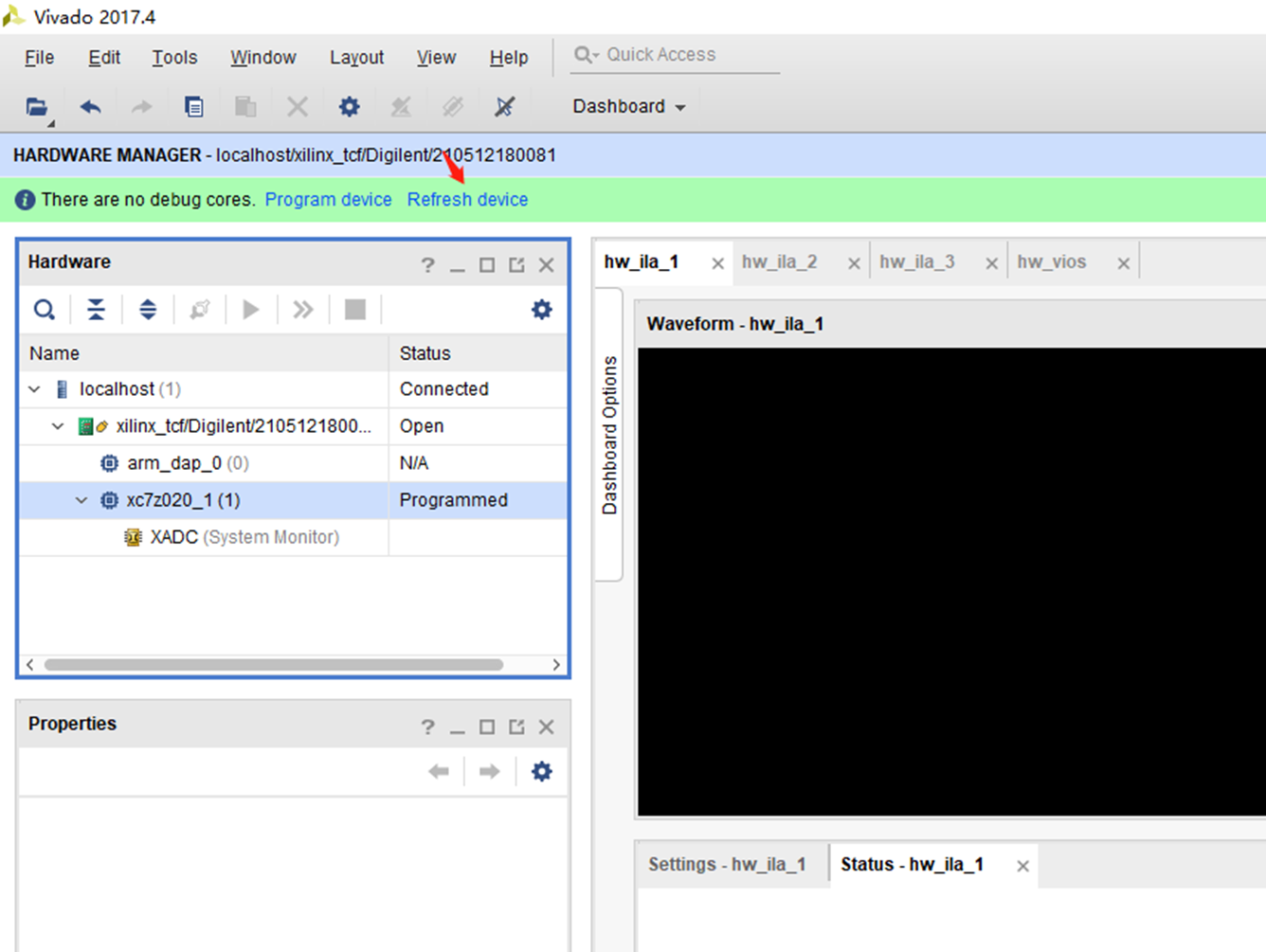
先把程序烧写到板子上

选择.bit文件

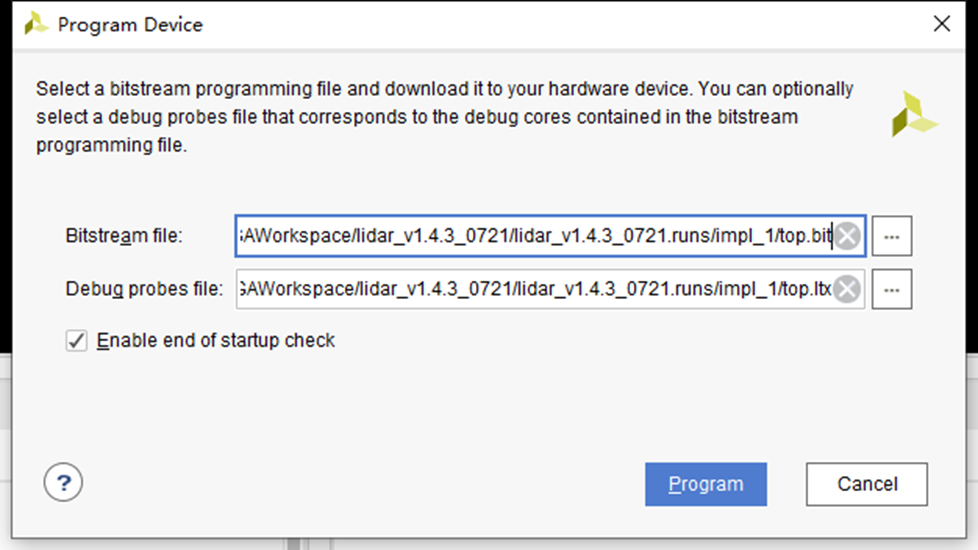
下载之后,Refresh device一下,这个操作一定别忽略。
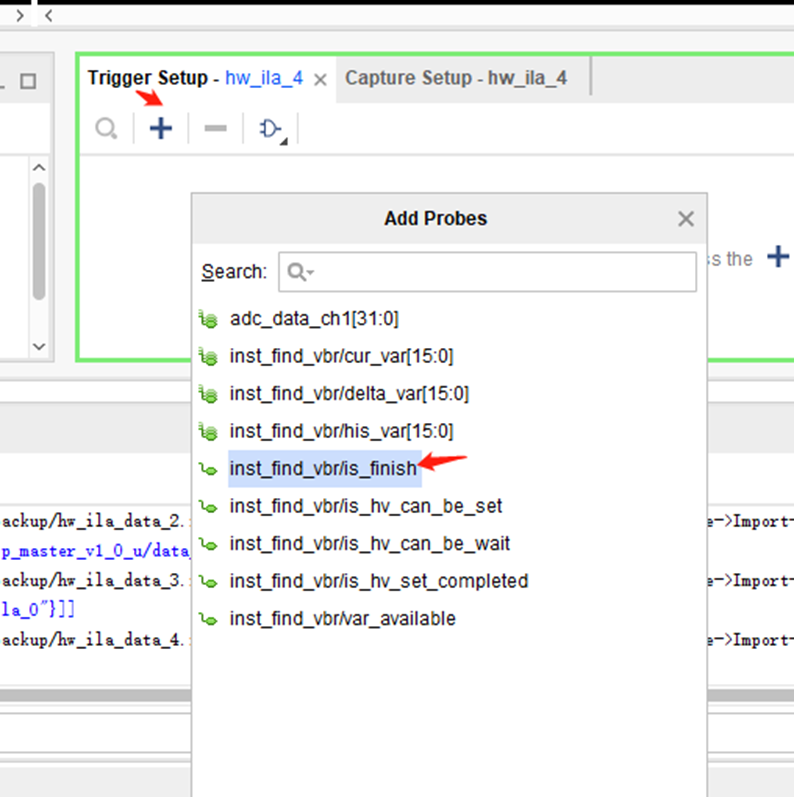
在触发设置的窗口,添加触发信号 ,可以用 这个加号添加,也可以用拖动的方式。
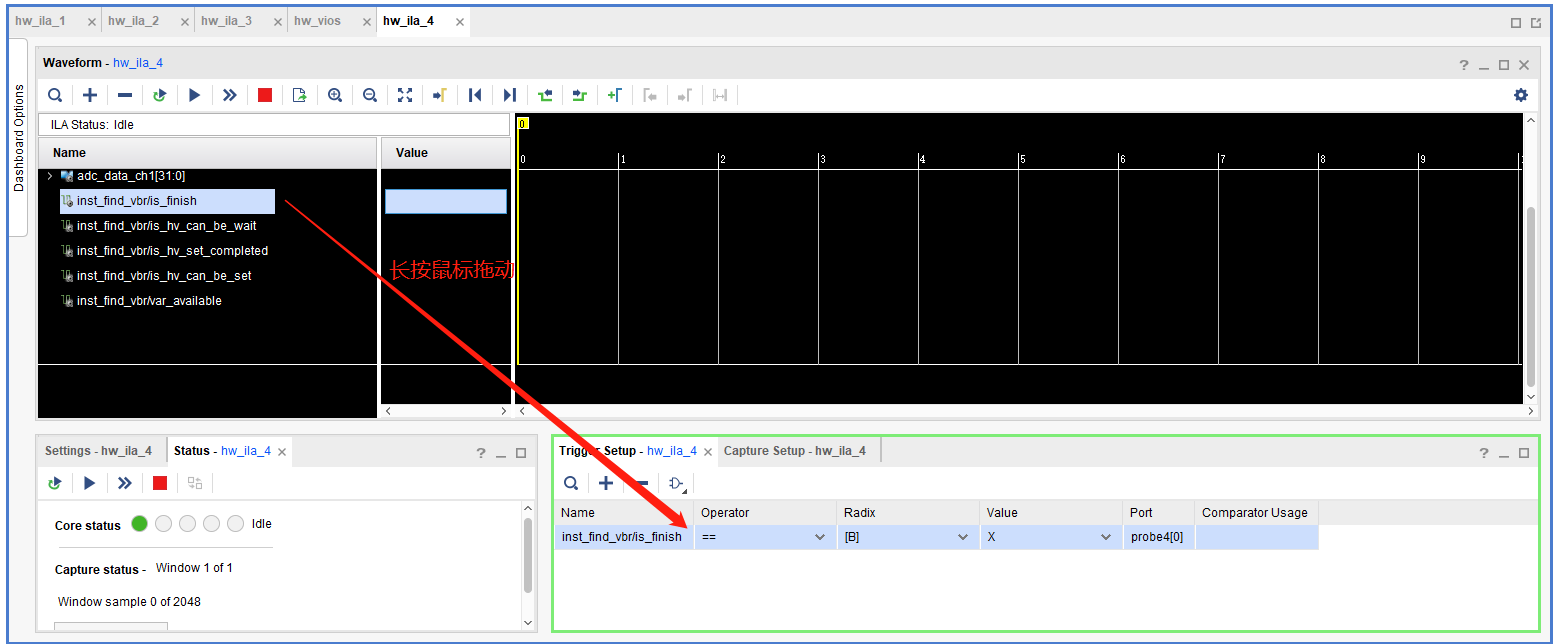
然后设置触发条件,并且运行。
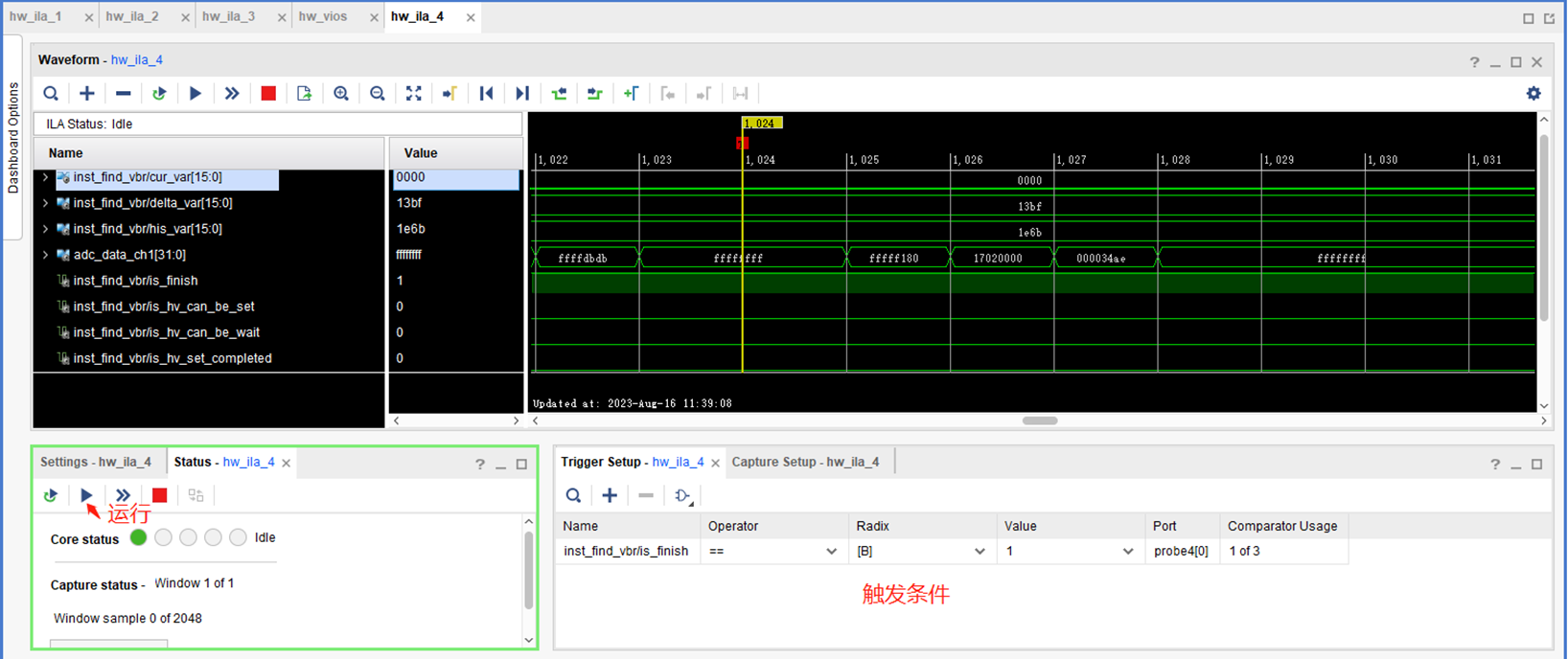
运行之后,如果系统捕获到了你的触发条件,那么波形窗口就会显示出来。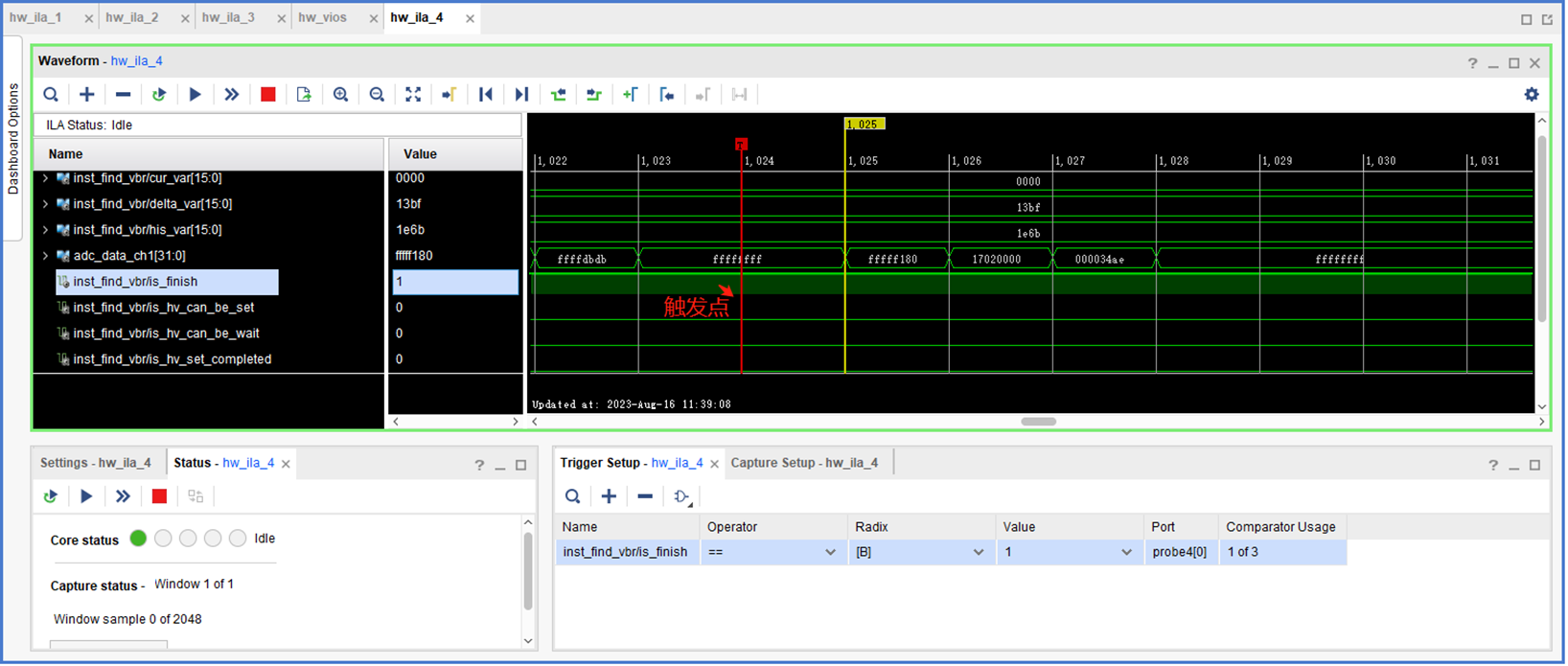
这个按钮是连续触发的意思,你先选中这个按钮,然后再点运行,它就会根据你的触发条件,连续不断的触发。刷新你的波形数据。 在调试一些需要观察数据变化的时候可以用使用。
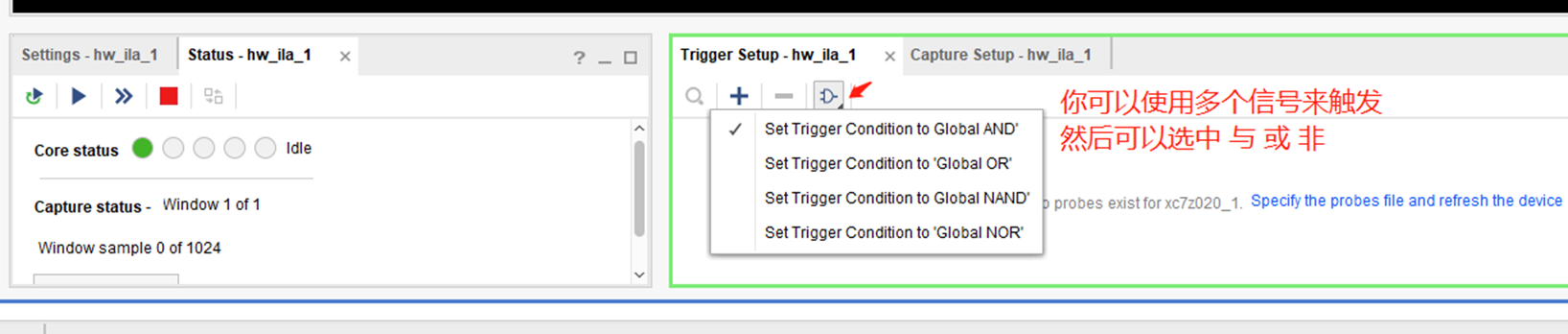
另外,当你想要用多个信号来进行触发的时候,需要点击这个按钮。
调试技巧4
调试的过程,一般是由顶层逐步向下再展开去看信号是否正常, 比如顶层的top,top里面实例化了一个 find_vbr子模块叫inst_find_vbr, find_vbr子模块里面实例化了一个var_compute子模块 叫inst_var_compute。 你调试的过程应该是先看 top层的信号正不正常, 再看find_vbr层的信号正不正常,再看var_compute层的信号正不正常。 逐步的深入。 这三层模块的内部信号,都是可以使用(* MARK_DEBUG="true" *)标记,然后在线调试观测的。
调试技巧5
如果你想判断程序是否执行了某个条件,那么你可以添加一个test_flag变量, 复位的时候拉低,然后在你想检测条件下面把这个flag拉高。 这样我们就可以判断出,这个条件是否被执行过。
注意事项
代码只要烧写进去了,它就会自己跑起来,不会等你点![]() 这个按钮,它才开始跑。
这个按钮,它才开始跑。
比如你自己写了一个内部的复位信号, 你在调试的时候,你是抓不到rst_n的上升沿的。 复位时间是小于1ms的,因为等你去抓的时候,人家早就已经拉高了。
(* MARK_DEBUG="true" *) reg rst_n;
reg [7:0] rst_counter; // 默认为0
parameter RESET_COUNT_MAX = 100;
always @(posedge clk) begin
if (rst_counter < RESET_COUNT_MAX) begin
rst_counter <= rst_counter + 1;
end
else if(rst_counter == RESET_COUNT_MAX)begin
rst_counter <= rst_counter;
end
else begin
rst_counter <= 'd0;
end
end
always @(posedge clk) begin
if(rst_counter==RESET_COUNT_MAX) begin
rst_n <= 1'b1;
end else begin
rst_n <= 1'b0;
end
end
越学习,越觉得自己无知,后面应该会有一篇讲VIO的博客。欢迎大家留私信,或者评论区讨论。 分享大家的调试问题和技巧。
未完待续...