摘要:
本文从信号灯服务入手,简单介绍了车路协同工程化落地过程中的一些关键问题和解决方案,包括设备接入、V2X消息层编解码、C-V2X通信,车端消费以及车路协同安全防护等,类似的问题还有很多,需要从业者做极致的工程优化。
随着车路协同在全国示范区和双智试点项目的推进,V2X技术逐步成熟,车路协同的增量效应被验证。如今,车路协同已成为未来智能交通的关键基础,但实现规模化落地仍面临着挑战。如何解决规模化落地的问题已成为智能交通领域内的重要话题。
规模化落地的系统要求
车路协同规模化落地是指将车路协同技术在实际交通场景中进行大规模应用,以实现更高效、更安全、更智能的交通运行和管理。具体而言,车路协同规模化包括对交通设施、车辆和用户移动设备的智能化升级,以及对数据传输、处理和应用的大规模支持和优化。在规模化应用中,V2X技术将不再是一个单个的示范项目或试点,而是覆盖城市、地区甚至全国范围的交通系统的一部分,从而实现更加普及和广泛的应用。
车路协同规模化落地应满足以下基本条件:
1.标准化:统一南北向生态的接口规范和通信协议标准,统一空间位置协议,异构设备和系统之间具备互操作性。
2.高可用性:具备智能运维、OTA、数据更新、数据共享、质量监控,弹性调度等能力,确保系统的高可用性。
3.可扩展性:具备多层次的感知能力,包括硬件算力、感知算法指标、通信能力、道路智能化分级标准等,满足不同车型和路况的要求。
4.安全性:保障数据的安全性和隐私性,防止恶意攻击和数据泄露,为用户提供可靠的服务。
规模化落地的典型问题和解决思路
信号灯服务是车路协同中的一个重要应用,也是智能交通系统的发展的重要基础。它可以为智能网联车和自动驾驶车辆提供实时、准确的灯色和倒计时信息,通过接收这些信息,车辆可以结合自身的行驶状态提前做出决策,例如选择最佳速度、避免急刹车和闯红灯等行为,从而提高整体的交通效率和驾驶安全性。此外,信号灯服务还可以与其他车路协同应用协同工作,例如路口协同、车辆行驶路径优化等。本文将以信号灯服务链路为例,讨论实际工程化落地中的典型问题和解决思路。
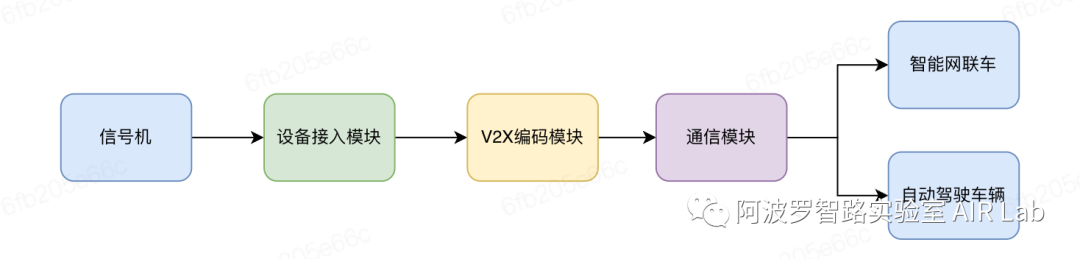
一个标准的信号机服务链路如下:
1) 「设备接入」 统一规范,提升效率
车路协同信号灯的数据源大部分来自于城市道路的交通信号机或信号机外接的智能采集设备,信号机和智能采集设备与路侧计算单元(RSCU)或路侧通信单元(RSU)之间的协议并没有一个统一的接入标准。信号机厂商可能支持不同的标准协议或者私有协议,针对标准协议的理解各厂商也存在偏差,这会导致信号机的数据表现存在轻微差异,严重的可能出现灯色或倒计时与灯显不一致的情况,这就需要对不同信号机厂商设备进行重度的适配,影响信号机的接入效率。
类似于信号机或采集卡,其他路侧设备的接入也存在该问题,包括枪机、鱼眼、激光雷达、毫米波雷达、RSU等,这就需要为每种类型的设备提供通用的统一的接口和规范,使得不同类型、不同厂商的设备可以以一致的方式接入系统,并提供标准的消息接口和数据格式。这样可以屏蔽相同类型设备不同厂商之间的差异性,降低系统集成的复杂性和开发成本,提高系统的可扩展性和灵活性。【智路OS】开源的硬件抽象层对各类设备进行了抽象,各设备厂商按照标准进行适配接入,开发者基于智路OS可专注于业务逻辑的实现,而不需要过多考虑底层硬件接入细节,从而提高开发效率和接入质量。

2)「V2X消息集编解码」 标准演进需结合工程应用场景,不同版本需兼容
V2X消息集是车路协同应用场景实现的基础,它要求设备接入数据或感知数据转换成V2X消息集标准定义,以便发送给路侧通信单元、车辆通信单元或其他移动设备,保证应用和服务的互操作性和互通性。车路协同中信号灯服务主要用到的标准消息类型是信号灯相位与配时消息(SPAT)和地图消息(MAP)。以MAP为例,MAP消息通过地图采样而来,包含车道的经纬度和车道对应的信号灯相位信息。MAP消息定义和各图商对地图数据定义不一致,车端消费信号灯信息,需要进行相位匹配,极大的浪费了车端的计算资源,提升了系统的复杂性。另外,由于车道和信号灯现实变更经常发生,导致静态消息map和实际道路要素位置信息发生偏差,最终影响服务的可靠性。针对该场景,通过路侧感知观测到现实变更,对地图进行实时动态更新,包含map消息和消费车辆的地图变更,但实际生产实践中,map消息当前不能满足【现实变更】语义需求。这就需要map消息结合落地应用进行调整和优化。
类似问题在其他消息中也很常见,例如感知共享消息SSM,路侧感知的全量交通参与者和障碍物对于智能网联车和自动驾驶车辆具有重要应用意义,但由于一些通信设备能力的限制,一个路口的交通参与者过多则无法通过一个数据包全量发送给车端或其他消费方,而标准的SSM消息不支持消息分片,因此在实际落地中,必须使用私有的消息或者其他替代方案,比如按区域发送等。解决此类问题,要求V2X消息集标准和工程应用需要紧密结合,同时也需要不断地进行调整和改进,以满足不断变化和创新的应用需求。
在标准的迭代过程中,也需要重点关注兼容性问题。随着V2X标准的不断推出,不同版本标准的向下兼容成为了一个主要问题,比如MAP消息中的LaneWidth字段从可选字段变成了必选字段,如果在旧的版本中没有使用此字段,则新版本会存在编码失败问题。同样的Map中的NodeList字段、RSI中的PathPointList字段取值范围变小,也会导致向下兼容的问题。另外由于C++的ASN.1的编码较为复杂,稍有不慎就可能会产生内存泄漏等问题,对非专业开发者上手难度较高,做好消息标准的兼容性至关重要。对已发布的消息版本,为了能够兼容多种标准协议,方便开发者轻松上手V2X标准消息编码,加速车路协同规模化落地进程,【智路OS】开源的airos-v2x-msg提供了多版本消息集兼容的方案,通过配置即可切换消息版本。
3)「V2X车路通信」极致的工程优化,最大化利用成熟通信体系
V2X通信指的的车-路-云等不同异构体之间的协同通信,跨多主体、高并发、低延迟、高可靠的通信服务是规模化落地的必选项。同样以信号灯服务为例,在路-车链路上,时延、频率、覆盖范围、等核心指标将直接影响信号灯的服务质量,不可靠的数据传输通路,将会导致整体服务不可信,车端无法消费。因此在实际部署应用中,应考虑各影响因子,充分利用现在已经成熟的搭载LTE-V2X通信模组的RSU和OBU设备提供的能力进行极致的工程优化。
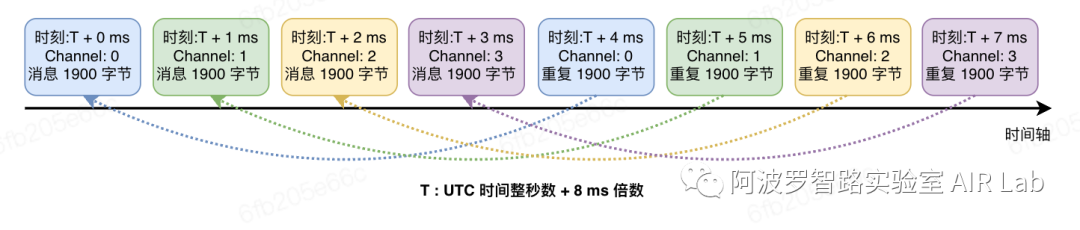
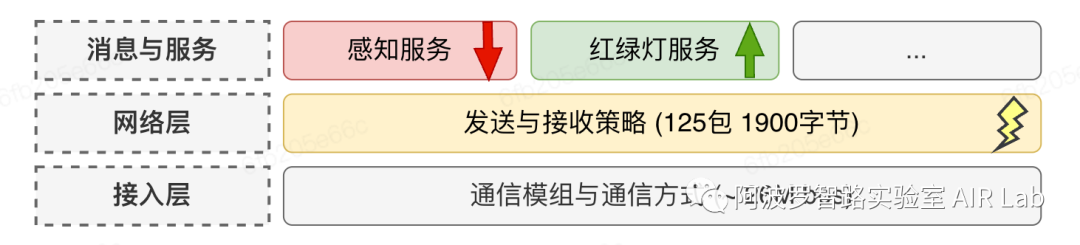
以RSU为例,从带宽和频率层面来看,为了给L2或者L4提供高质量的信号灯服务,SPAT消息发送频率需要达到10Hz,路侧广播发送数据的上限仅有125*1900Bytes/s,如下图所示,每一个RSU占用一个channel,每8ms中发送一帧数据,再发送一次是为了防止丢包。所以从应用层来看,每秒钟最多可发送125帧数据,每帧数据上限1900字节.
按照MAP消息每秒钟发送一次,SPAT每秒钟发送10次,通信链路上还有相当多的空闲,但是,面对数据量更大的感知数据来说,现有的通信链路就显得捉襟见肘了。参考[智路OS]开源的感知部分的数据结构,在大型路口繁忙的时候,路侧RSU要负责向外广播300+目标(车辆,行人,锥桶,三角牌等等)。超过180KiB/s的数据,按照每1800字节拆分数据包(剩余100字节用于存储DSMP头,以及存储用于将数据包拼接的数据)来看,这个负载已经超过了每秒125帧的发送上限,基于此,包括红绿灯数据延迟,感知数据延迟等会给车端消费带来极大的影响。从长期演进方向,NR-V2X和EUHT等方案在逐步推进落地过程中,可以解决带宽不足的问题,但其落地周期长,开发者应对当前成熟的基础通信体系,从工程实践上可以进行极致的优化:
例如:从QoS控制上,可对消息根据不同的应用场景进行分级,根据信道忙率,制定精细的策略,以下是两个简单的分级示意:
提升感知发送优先级,添加红绿灯延迟过滤器
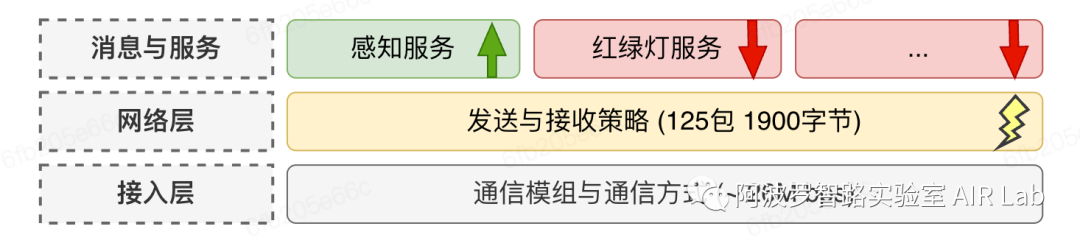
提升MAP&SPAT发送优先级,添加感知消息延迟过滤器
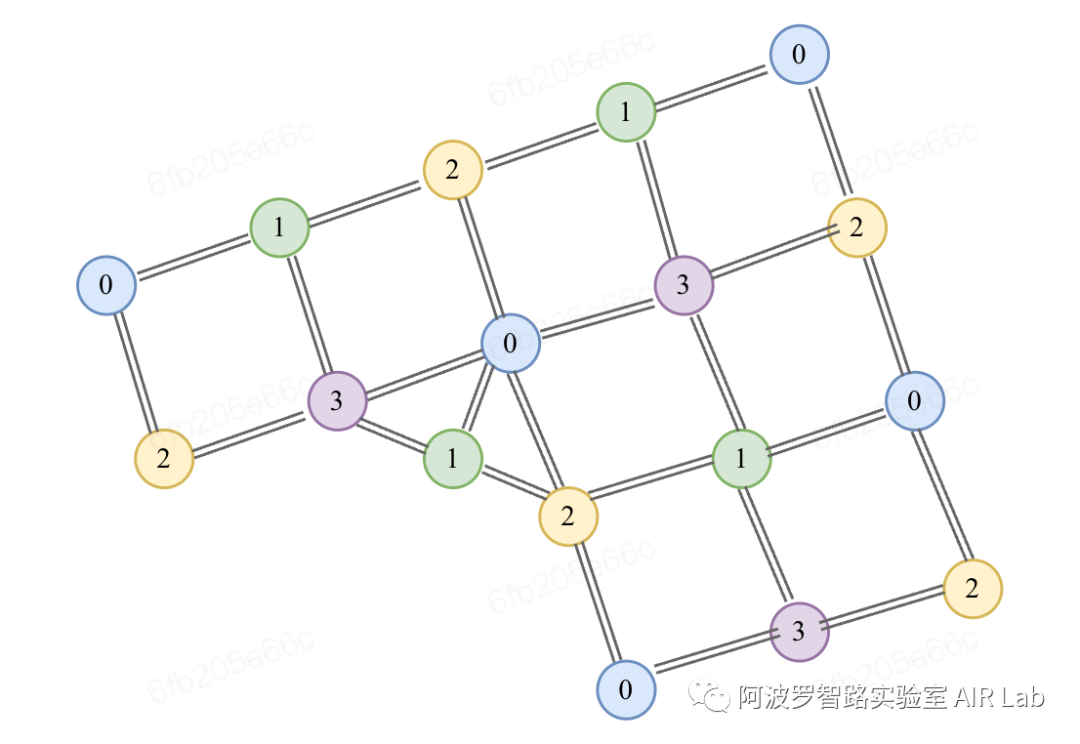
从部署方案上也可以进行优化,例如不同的信道的RSU可以间隔部署,可以有效防止路口间的信号干扰,如下图所示:
4)「车端数据消费」路侧系统"功能安全"保障,车-路同构高质量服务
安全和效率是智能交通永恒的话题,安全是效率的前提,车路协同路侧服务首先要保证高置信度,车端才能消费。依然以信号灯服务为例,路侧系统可为网联车和自动驾驶车辆提供超视距、全天候的信号灯服务。信号灯服务链路任一随机故障、系统故障或共因失效都不应导致车端故障。路侧信号灯服务可以引入功能安全,避免因为系统功能性故障导致不可接受的风险。

(ISO 26262-6 & ISO/PAS 21448 功能安全分析流程)
如上述示例描述,车路协同系统通过车端V2X模块和路侧边缘系统共同组成了车路协同非对称高可用系统,共同保障服务的"安全可靠"。
5)「V2X安全」构建纵深防御系统,保障车路协同安全
车路协同安全问题不容忽视。根据upstream报告,自2019年以来,汽车行业公开347个漏洞,其中2021年为139个,2022年为151个,漏洞数量逐年增加,黑客也可以利用这些公开信息在类似系统中寻找漏洞。恶意的汽车黑客攻击不仅易导致服务中断,还可能造成公共安全隐患和人身威胁。车路协同安全体系化、标准化建设是支撑车路协同规模化的前置依赖条件。
车路协同安全是一个需要从细节入手的系统性工程,每一个安全子系统都需要深度打磨。以现行成熟的LTE-V2X PC5直连通信为例,它主要通过广播的方式支持车辆之间和车辆与基础设施之间的高速短距离通信。广播通信的安全风险相对较高,它可以被任何接收设备获取,攻击者可以利用广播通信发送虚假消息或破坏真实消息,从而干扰或破坏整个通信网络的正常运行。因此,V2I/V2V应用场景需要重点考虑安全风险并采取相应的安全措施。我国针对C-V2X的安全框架已基本完善,安全标准有YD/T3594-2019和YD/T3957-2021,框架遵守YD/T 3594-2019,实现细节遵守YD/T3957-2021。前者定义了整体的V2X安全框架,后者规定了V2X CA的具体实现细节。整体架构如下图所示(以百度APOLLO CA平台为例):由受信任的V2X-CA给V2X车路终端颁发注册证书(相当于车、路侧的身份证),车和路侧V2X通信设备使用注册证书定期去CA机构换取假名证书和应用证书;在V2X通信时,使用假名证书和应用证书对V2X消息进行签名,并在消息中携带证书,为消息的信用背书。以此建立身份认证、安全加固等安全防护能力,支持各类车与设备通信场景下的身份认证,保护数据的机密性和完整性。
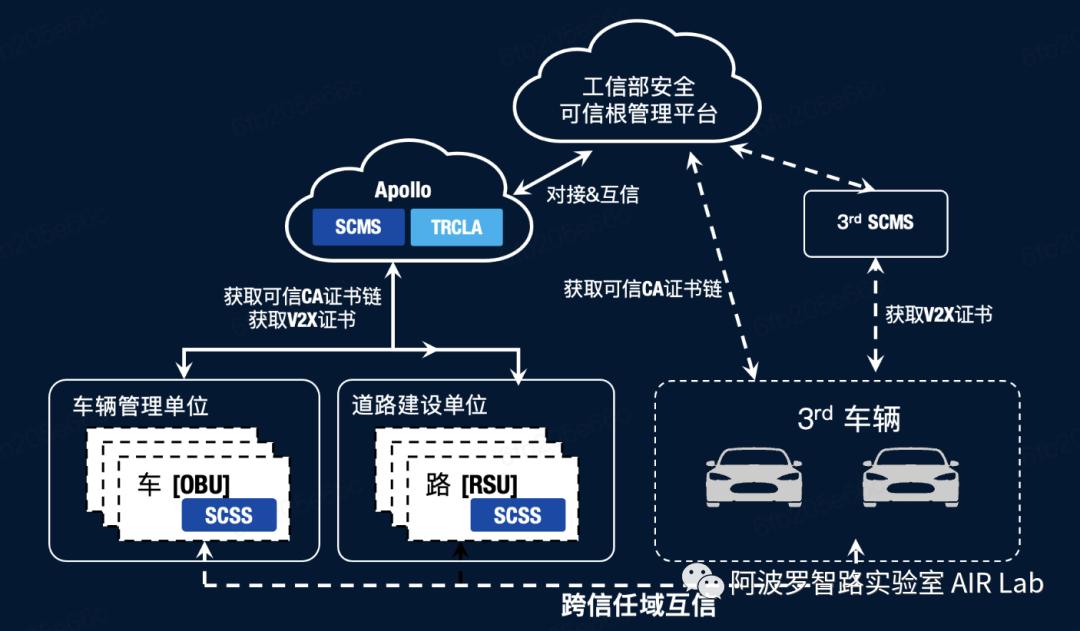
(管端安全通信防护方案)
SCMS:V2X数字身份管理系统
1、为车企和政府提供ITS 数字身份管理平台,实现交通参与者的统一身份管理。
2、V2X证书发布、更新、撤销等证书管理服务。
TRCLA:可信证书链平台
1、与工信部安全可信根管理平台对接
SCSS:V2X终端安全通信子系统
1、V2X证书发布、更新、撤销等证书管理服务。
标准和实践应用需要紧密结合,北京市高级别自动驾驶示范区首次实现了国内城区级车联网安全身份认证系统,支持X.509 和C-V2X 证书管理系统,为V2X上车量产打下了坚实的基础。标准化的安全防护机制是解决互操作性的必要手段,以下行动项仍需产业共同推进,加速V2X规模化落地进程:
1.车联网安全身份认证从示范活动到单区域突破再到规模化部署,北京成功经验快速复制到全国各个城区
2.国家政策上出台V2X CA认证资质和相关条文,工信部可信根管理平台进行高可用部署,推行商用
3.目前出台的CA管理体系未包含对重要数据加密的标准,应尽快推出细则,保护敏感数据,保证公共安全和国家安全。
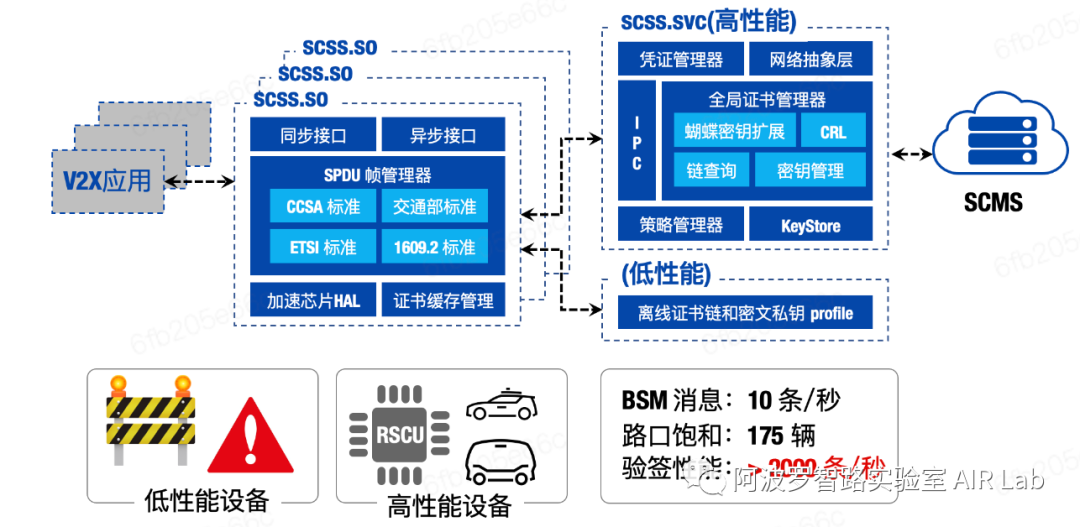
另外终端安全通信子系统也需要充分考虑高低性能设备的差异性,无IP设备,验签计算压力等问题,以百度apollo为例,在实践过程中,对终端安全通信子系统进行了深度优化,支持丰富的异构设备,支持无IP网能力的设备,可裁剪设计满足搭载不同硬件设备的量产车型和路侧基础设施的安全防护需求。整体架构如下图所示:
小结:
本文从信号灯服务入手,简单介绍了车路协同工程化落地过程中的一些关键问题和解决方案,包括设备接入、V2X消息层编解码、C-V2X通信,车端消费以及车路协同安全防护等,类似的问题还有很多,需要从业者做极致的工程优化。车路协同技术是多学科交叉的创新性基础技术,这不仅需要前瞻性的宏大的理论研究和规划,更需要实际应用的规模化落地和针对关键问题的不断优化迭代,只有这样才能真正推动技术的发展和创新。
仰望天空,脚踏实地,与大家共勉!
来源 | 阿波罗智路实验室 AIR Lab