openTCS简介
openTCS是一个开放的交通控制系统,可以实现机器人的任务分配、路径规划、调度等一系列的功能,也有相应的仿真平台,既可以使用该软件及仿真平台进行基本的任务分配、路径规划等操作,也可以基于该平台进行二次开发,总之是一款很好很强大的软件。
本文主要介绍如何利用openTCS的plant overview平台进行基本的操作,主要内容来源于该软件内自带的opentcs-users-guide手册。
启动客户端
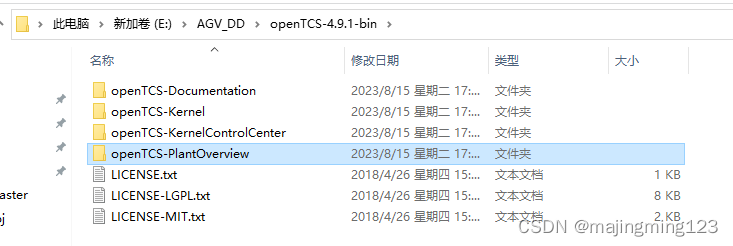
方法A.在openTCS文件中,找到openTCS-xxxx-bin点击进入 按顺序点击
openTCS-Kernel中的startKernel.bat (windows系统 Linux系统点击.sh)
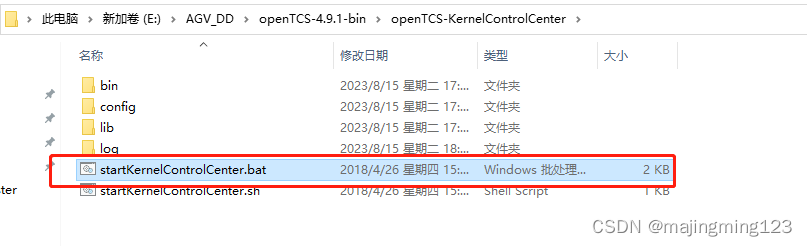
openTCS-KernelControlCenter中的startKernelControlCenter.bat
openTCS-PlantOverview中的startPlantOverview 以完成平台启动
基本操作
1.openTCS-Kernel中的startKernel.bat

出现页面:

此处页面kernel之前加载过的车辆会出现,若是初次使用,kernel内部时不会出现车辆的;
初次使用如图所示:

2.openTCS-KernelControlCenter中的startKernelControlCenter.bat
出现页面:已连接kernel且切换online状态;

3.openTCS-PlantOverview中的startPlantOverview 以完成平台启动
出现页面:

可以加载例程:File->load model...->


此时可以下载模型:
将模型与优化核心kernel相连 File-> Persist the model in the kernel
出现信息: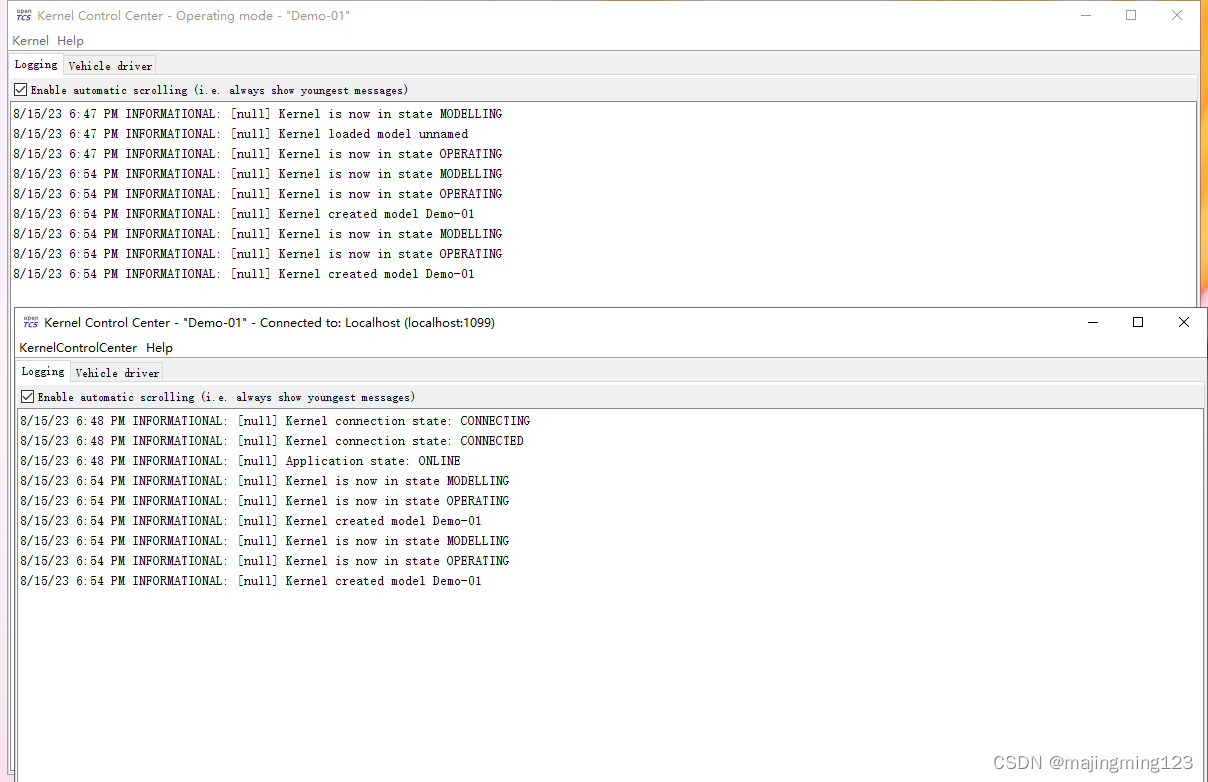
此时就会有车辆信息:

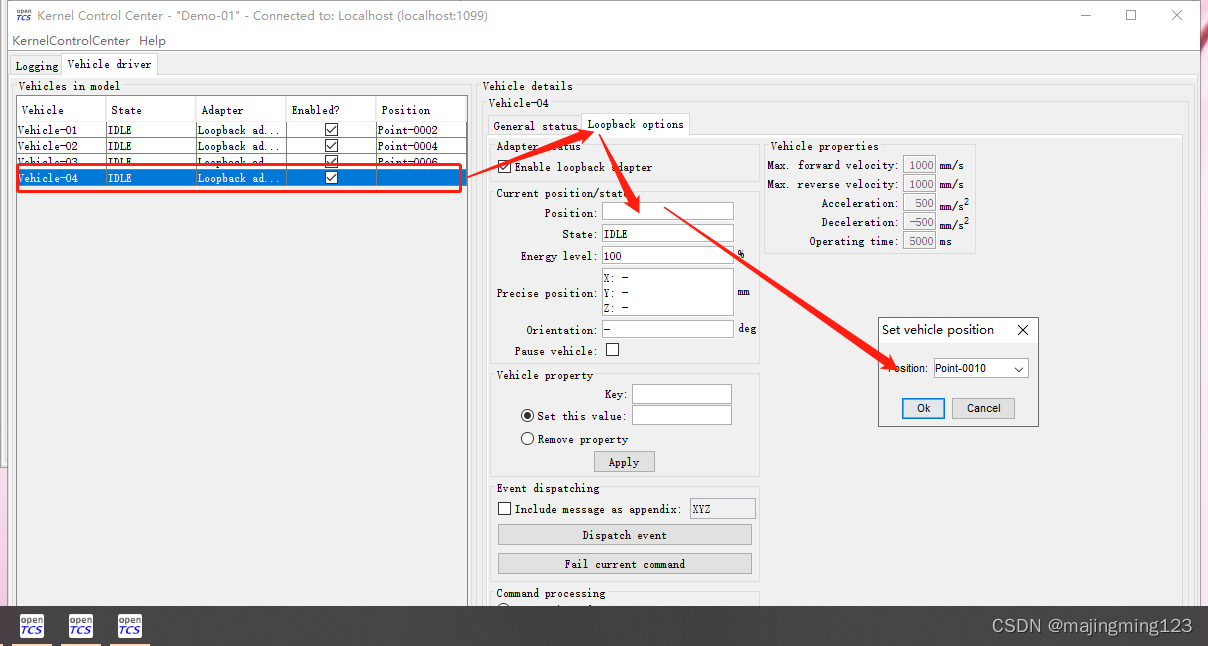
在KernelControlCenter界面内选择想要放置于plant overview中的小车,点击Enabele,并设置小车的初始位置(Position)如图1所示。
在图1界面的右侧,展示了小车的各种属性等,可以进行调整。
加载车辆初始位置:
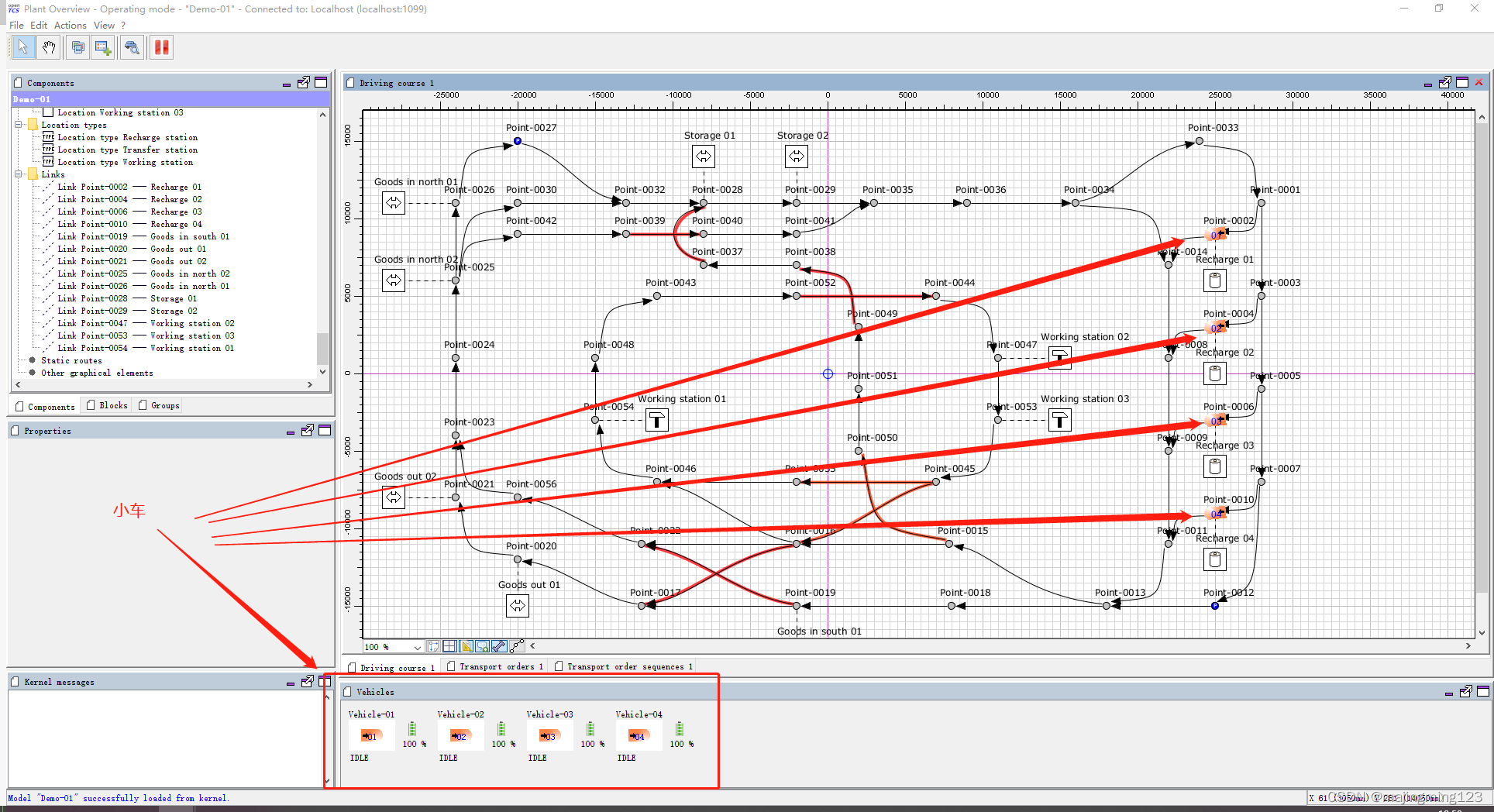
将PlantOverview的状态改为 File->mode->Operating mode

这时,plant overview界面会出现小车,如图2所示
下面就可以会挂路径任务:
1.点击plant overview界面上方的Actions | Transport Order 在该界面内添加actions以创建订单,如图5所示。

创建订单
2.可在该界面内选择category实现订单种类的选取,选择Vehicle内的选项将订单分配给不同的小车/自动分配。
3.创建订单完毕后点击ok按钮,订单被立即分配,小车开始运行,

4.点击小车,选取Withdrawing transport orders 可以让小车停止当前任务
5.连续生成订单:View | Plugins | Continuous load
6.报告(logging)报告写入的目录为log/statistics/ subdirectory 通过View | Plugins | Statistics查询
或者直接给定目标位置;
右击车辆:Send to point...或者Send to lcation...
再次右击车辆:Dispatch Vehicle
源码下载地址
Releases · openTCS/opentcs · GitHubThe open Transportation Control System (by Fraunhofer IML) - Releases · openTCS/opentcs https://github.com/openTCS/opentcs/releases
https://github.com/openTCS/opentcs/releases