1.自适应巡航辅助功能描述
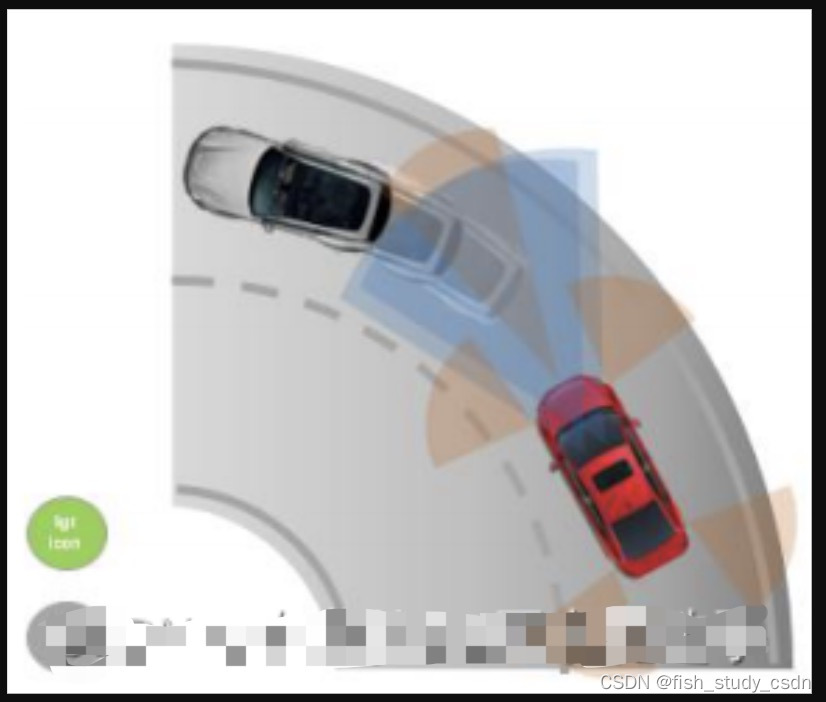
自适应巡航控制(Adaptive Cruise Control),它通过单目摄像头与雷达数据融合来检测前方车辆距离及相对速度,控制油门和刹车系统以实现稳定跟随前方车辆,且达到驾驶员设定的目标时距。在没有前方车辆时,ACC实现传统定速巡航的功能,使自车稳定至驾驶员设定的车速。ACC自适应巡航在高速公路下,能够辅助驾驶员以更轻松舒适的状态控制车辆。
2. 典型用例
表1 ACC典型用例
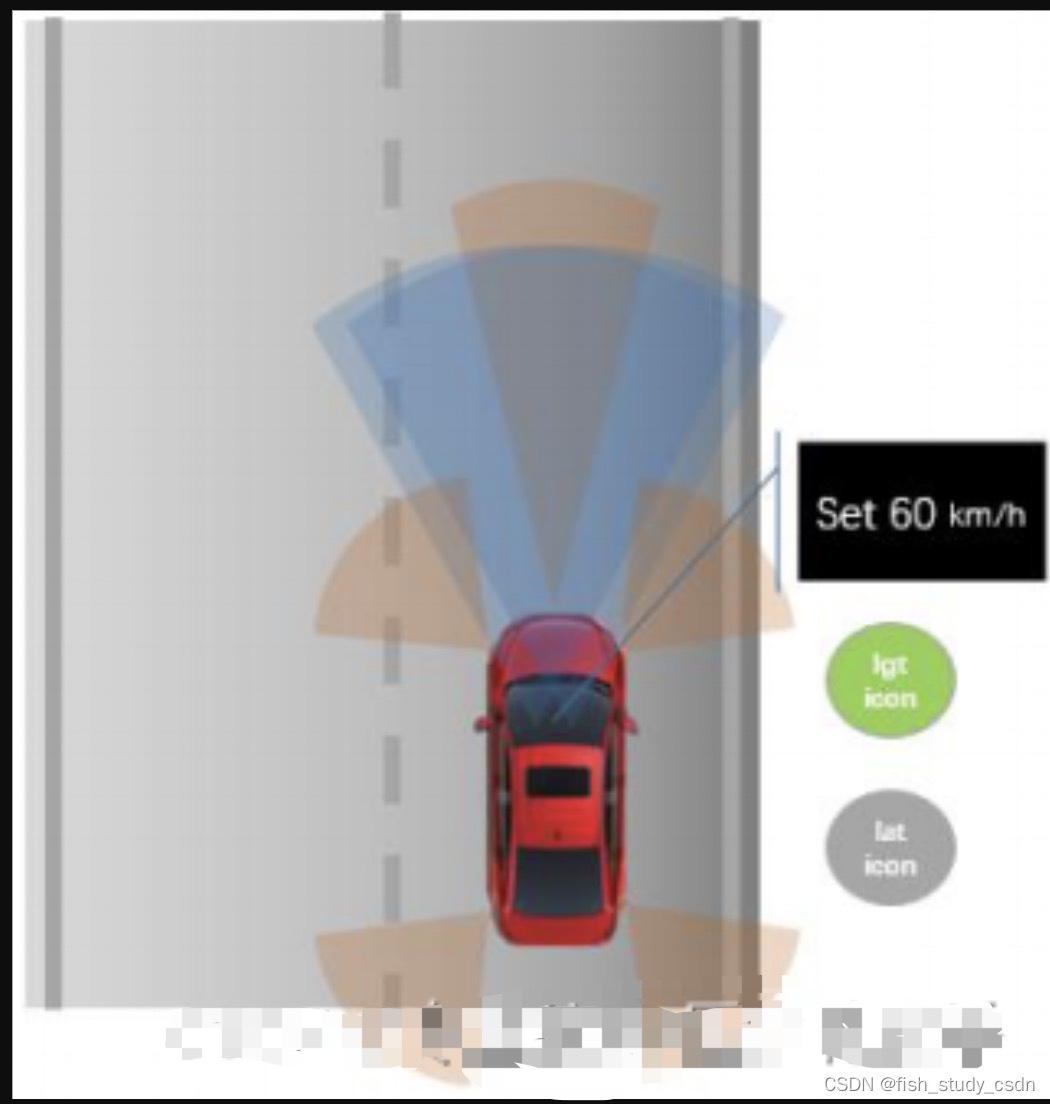 | 定速控制 车辆根据驾驶员设定的巡航速度行驶。驾驶员可设置的巡航速度范围为30-150km/h。 | |
 | 跟随控制 启停型ACC(ACC Stop & Go)使自车跟随前车行驶到停并满足以下需求:
在车辆跟随前车刹停过程中时,因近距离目标丢失导致ACC功能退出时提示驾驶员请接管后功能退出。 | |
|
| 弯道控制 弯道控制功能应当使车辆在弯道巡航时避免出现不舒适的加减速。
| |
 | 减速控制 ACC根据不同工况计算并输出目标减速度,输出至ESC车辆纵向控(VLC)模块实现自车减速控制。VLC接收ACC目标减速度,通过以下2种方式控制自车减速:
| |
 | 加速控制 ACC应根据不同工况计算并输出目标加速度,输出至车辆纵向控制(VLC)模块实现车辆的加速控制。车辆纵向控制(VLC)模块接收到目标加速度指令后计算输出扭矩,控制发动机管理系统(EMS)实现车辆加速。ACC加速度限值用于限制ACC目标加速度的最大值(如前方无目标车时设置较高的vSet),ACC加速度限值由以下两组数据组成,根据本车车速选择两者的较小值:
| |
|
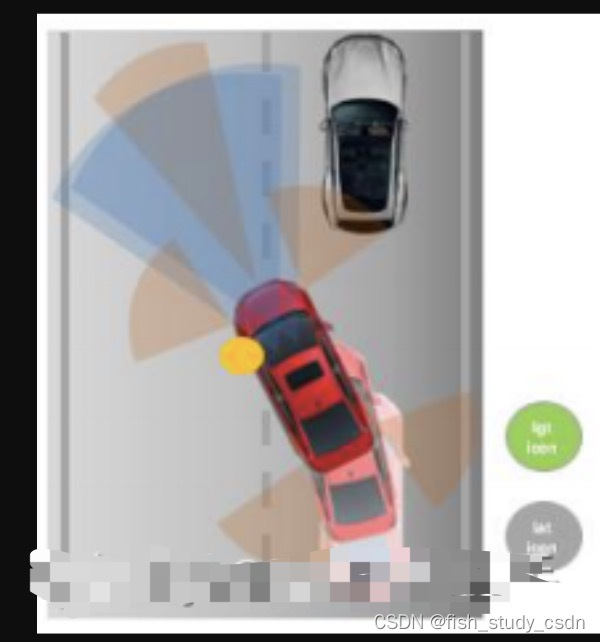
| 切入/切出控制 切入\切出控制功能在变道过程中,ACC释放前方目标、拾取所切入/切出车道车辆为新目标,从而继续保持控制 | |
 |
| |
| 超车抑制 超车(右侧)抑制功能应当被关闭,即车辆在变道过程中ACC S&G不会给车辆加速,变道后车辆车速恢复到驾驶员设定车速。 | ||