保证三种跟踪方式更加准确
1.局部关键帧
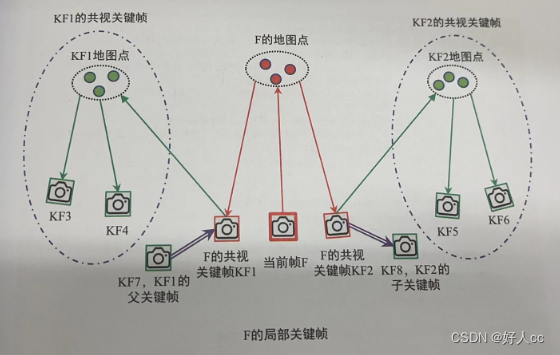
当前帧F的局部关键帧包括:
- 能够观测到当前帧F中地图点的共视关键帧KF1、KF2,称为一级共视关键帧。
- 一级共视关键帧的共视关键帧(前10个共视程度最高的关键帧),比如图中的KF1的共视关键帧为KF3、KF4,KF2的共视关键帧为KF5、KF6,称为二级共视关键帧。
- 一级共视关键帧的父关键帧和子关键帧。
代码:
2.局部地图点
局部关键帧对应的地图点为局部地图点。
局部地图点的更新代码:
3.局部地图跟踪
局部地图跟踪流程:
- 更新局部关键帧和局部地图点。
- 筛选局部地图中新增的在视野范围内的地图点,投影到当前帧中进行搜索匹配,得到更多的匹配关系。
- 前面得到了更多的匹配关系,再一次进行BA优化,(仅优化位姿),得到更准确的位姿。
- 更新当前帧地图点的被观测程度,并统计成功跟踪匹配的总数目。
- 根据成功跟踪匹配总数目及重定位情况决定是否跟踪成功。
代码: