文章目录
- PAPS类型与要求
- 类型1
- 类型2
- 功能要求
- 车位类型
- 水平空间车位
- 水平线车位
- 垂直空间车位
- 垂直线车位
- 车库
- 功能状态
- 泊入流程
- 泊出流程
- 性能验收
- 车位标线
- 验收标准
- 性能测试
- 水平空间车位
- 水平线车位
- 垂直空间车位
- 垂直线车位
- 车库车位
PAPS类型与要求
对于PAPS,需要驾驶员操作车辆直到确定停车位置。直到停车操作完成之后,PAPS系统执行停车所需的所有操作,如转向、加速、制动、换挡和驻车制动。以下两种类型的PAPS在本文档中是根据系统由车载传统驾驶员监督或不一定位于驾驶员座位上的远程驾驶员远程控制的场景定义的。
类型1:系统由位于驾驶员座位上的常规驾驶员监督 —— APA。
类型2:系统由远程监督 —— RPA/HPP。
类型1
1. 该系统应由坐在车内的常规驾驶员进行操作监督。
2. 司机须进行自动泊车操作。
3. 系统自动搜索停车位。
4. 搜索可以自动启动(后台车位搜索),也可以由常规驱动程序启动(功能开启后搜索车位)。
5. 在这两种情况下,系统应通知驾驶员系统已识别出一个可用的停车位。
5.1 如果识别出多个可能的停车位,系统将显示候选车位,驾驶员可从候选车位中选择预期的停车位。
5.2 如果司机没有在自动泊车系统所识别的多个泊车位中选择任何泊车位,则可继续进行搜寻。
该系统通过自动控制转向、推进、制动和换挡,在规定的定位精度范围内移动车辆,将车辆停在目标车位,最后释放控制。
类型2
主要面向两个场景,泊入和泊出。车位类型为空间车位、线车位和车库(类似于立体停车位)。
泊入: 系统应通知驾驶员它已识别出一个或多个可能的停车位置。如果识别出多个可用的停车位置,系统应显示候选车位。系统推荐一个停车位置,但驾驶员应该能够从候选中选择预定的停车位。如果驾驶员没有选择,系统则使用推荐的停车位。当车辆停止时,驾驶员将控制方法传递给远程控制端。然后,驾驶员使用远程控制设备激活停车操作。只有当驾驶员使用远程控制设备持续对车辆进行移动授权时,系统才会自动运行,并在指定的定位精度范围内将车辆停在目标车位上。当到达最终停车位置或远程驾驶员使用远程控制装置停用系统时,车辆停止。
泊出: 当系统收到并确认驾驶员的远程离车请求时,系统将启动泊出操作。只有当驾驶员使用远程控制设备持续对车辆进行移动授权时,系统才会自动运行,并在指定的定位精度范围内将车辆从停车位中移动出来。当到达指定位置或远程驾驶员使用远程控制装置停用系统时,车辆停止。
功能要求
车位类型
1. 水平空间车位
2. 水平线车位
3. 垂直空间车位
4. 垂直线车位
5. 立体车位
水平空间车位
泊车空间受下列一项或全部定义的限制:
1. 两辆参考车辆
2. 一侧存在路沿(可选)
对于这种停车类型,建议相邻车辆适当平行停放。标准停车位宽度W定义为PAPS车辆的长度加上Δy,车位深度D定义为PAPS车辆的宽度加上0.2 m。在有参考路肩的情况下,车辆以平行于它的固定距离停放。在没有路边石的情况下,停放车辆投射到地面的外边界之间的虚拟连接线是侧向基准线。车位的宽度为W,深度为D,如下图所示。W为两辆参考车之间的距离。深度D为侧向基准线与PAPS车辆宽度之间的距离+ 0.2 m。当PAPS车辆长度在4m ~ 6m之间时,Δy = PAPS车辆长度乘以0.25。对于小型车辆(≤4m): Δy = 4m * 0.25 = 1.0 m,对于大型车辆(≥6m) Δy = 6m * 0.25 = 1.5 m。
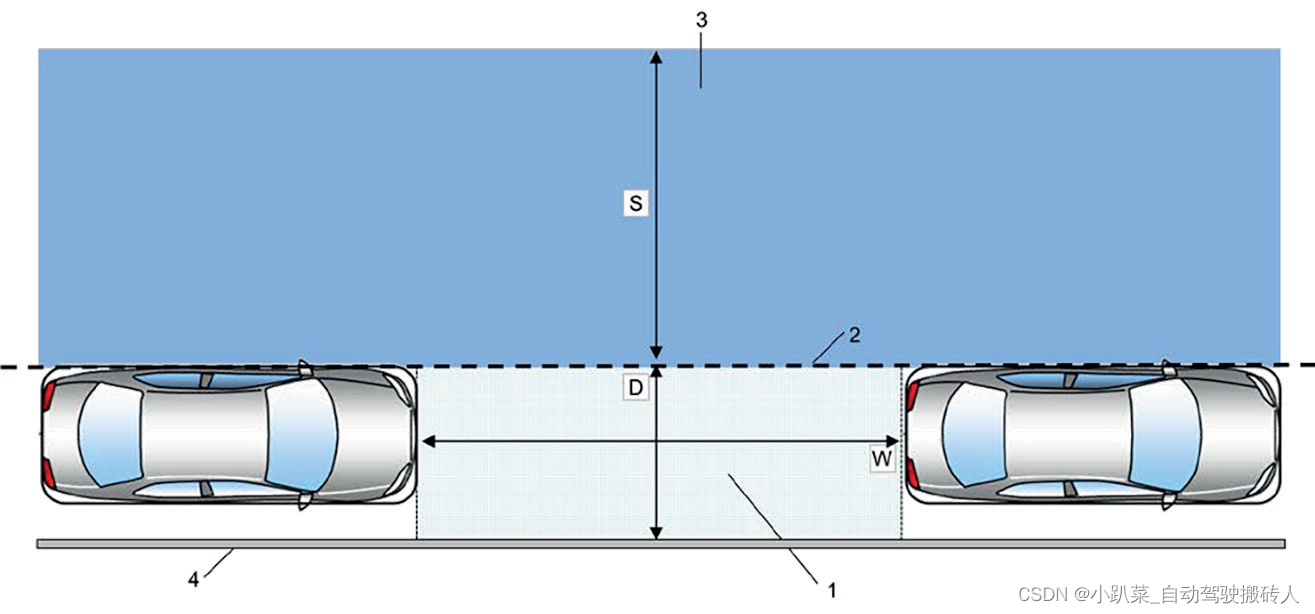
参数说明:
1 —— 目标停车区
2 —— 水平侧边参考线
3 —— 控制允许范围区域
4 —— 路沿
W —— 车位长度=车长+Δy
D —— 车位宽度=车宽+0.2m
S —— 控制允许范围区域宽度为4.5m
水平线车位
作为最低要求,泊车操作必须在受下列定义限制的停车场内进行 —— 地面上的对比标记。对比标记的最小对比度应为5(5)。标记的推荐尺寸和尺寸如下图所示。
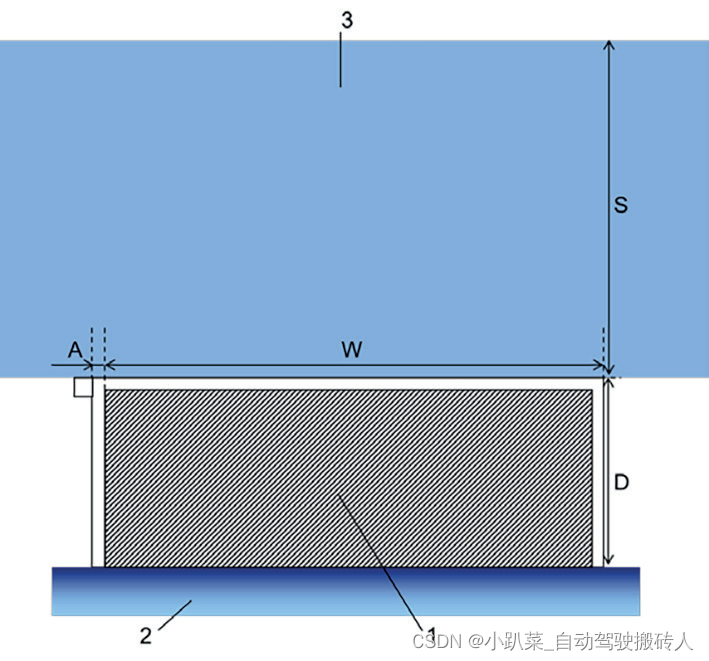
参数说明:
1 —— 目标停车区
2 —— 侧边边界
3 —— 控制允许范围区域
W —— 车位长度=7.0m
D —— 车位宽度=2.5m
A —— 车位线宽=0.15m
S —— 控制允许范围区域宽度为4.5m
垂直空间车位
必须在受下列定义限制的泊车空间内进行 —— 两辆边境车辆。对于这种停放方式,建议将周边车辆适当垂直停放。标准停车位宽度W定义为包括外后视镜在内的PAPS车辆宽度加上Δx (= 1.2 m),如下图所示。

参数说明:
1 —— 目标停车区
2 —— 控制允许范围区域
W —— 车位宽度=车宽(包含后视镜宽度)+1.2m
S —— 控制允许范围区域宽度为7m
垂直线车位
作为最低要求,泊车操作必须在受下列定义限制的停车场内进行 —— 地面上的对比标记。对比标记的最小对比度应为5(5)。标记的推荐尺寸和尺寸如下图所示。
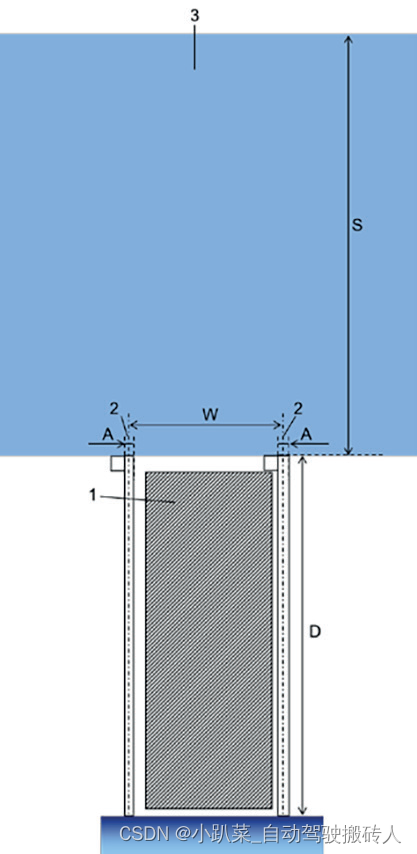
参数说明:
1 —— 目标停车区
2 —— 控制允许范围区域
3 —— 控制允许范围区域
W —— 车位宽度=2.5m
D —— 车位深度=6.0m
A —— 车位线宽=0.15m
S —— 控制允许范围区域宽度为7m
特殊声明:
1. 对于车宽大于1.9m的测量,车位宽度应为车宽+0.6m
1. 对于车长大于5.0m的测量,车位深度应为车长+1.0m
车库
受以下定义限制:
1. 车库门;
2. 车库正面,侧面和后墙。
车库车位由门宽Wg、车位宽Wp、车位深D定义,如下图所示。
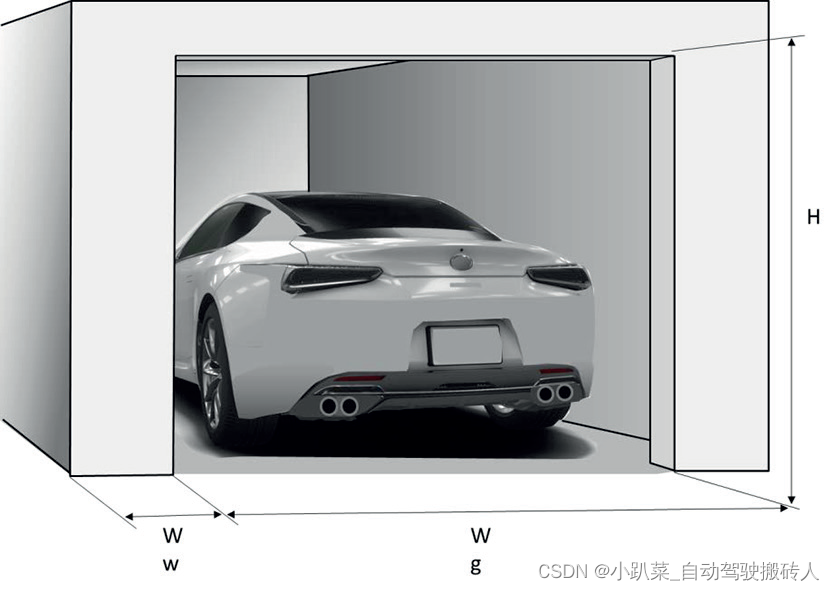
参数说明:
Wg —— 车库门宽度=车宽(包含外后视镜)+0.8m
Ww —— 车库正面墙宽度=1.0m
H —— 车库高度应>车高
1 —— 目标停车区域
2 —— 车库内边缘
Wp —— 车库内宽度应≥Wg
D —— 车库深度=车长+1.0m
功能状态
泊入流程
参数说明:
1 —— 驾驶员操作或者系统判断
2 —— 线车位与空间车位
3 —— 车库车位
4 —— 识别可用车位
5 —— OEM定义
6 —— 目标车位选择
7 —— 驾驶员授权
8 —— 泊车完成或退出
泊出流程
参数说明:
1 —— 远程控制命令
2 —— 远程控制授权
3 —— 泊出完成或退出
性能验收
车位标线
识别所需的停车场线与路面之间的最小亮度对比度应为5。亮度对比的定义如下:
停车场线亮度对比= (Lsl - Lrs) / Lrs
Lsl —— 标线亮度;
Lrs —— 路面亮度。
验收标准
1. 上文提到的车位均能识别且泊入泊出。
2. 泊入泊出的时间应在180s内完成。
3. 泊入泊出的试验次数应为10次,且至少应有9次以上的成功。
性能测试
水平空间车位
对自动泊车控制结束时PAPS车辆到达终点位置的要求,考虑车辆前后轮到路边石的距离D_f、D_r和到路边石的方向α(有路边石的情况)或两辆停放车辆之间的连接线的距离D_f、D_r和方向α(无路边石的情况)。
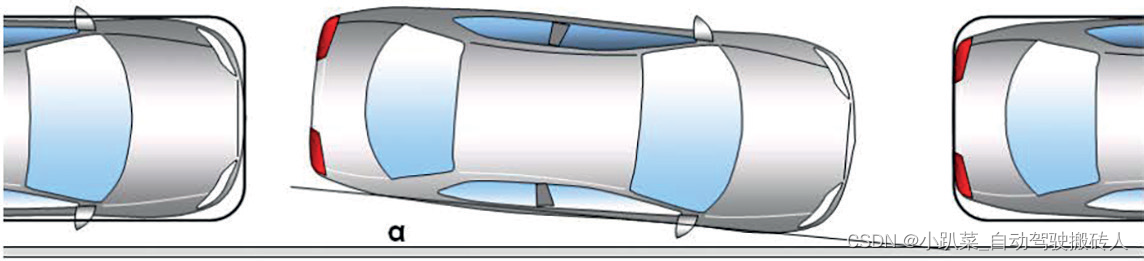
倾斜角度α的要求:
1. 倾斜角度应-3°≤α≤3°。
2. 倾斜角度α的标准差应不大于1.5°。
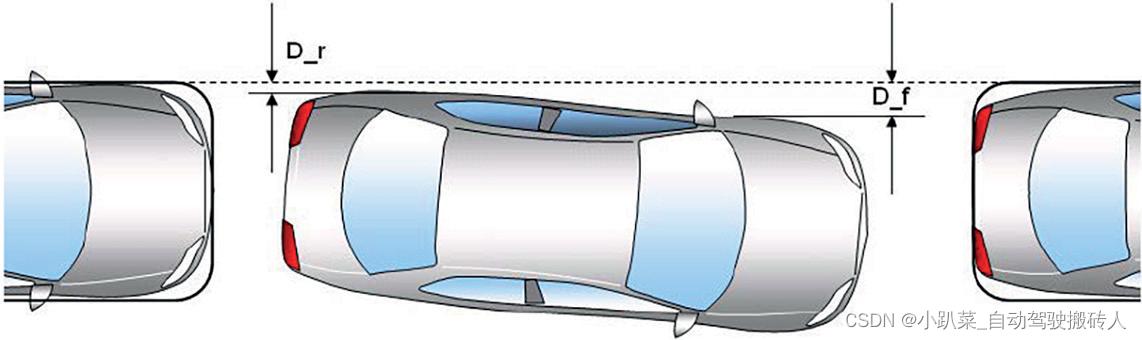
D_r/D_f的要求:
1. D_r/D_f距离路沿的距离应为5cm~30cm。
2. D_r/D_f距离车位参考线的距离应由OEM制定。
3. D_r与D_f的标准差应不大于10cm
水平线车位
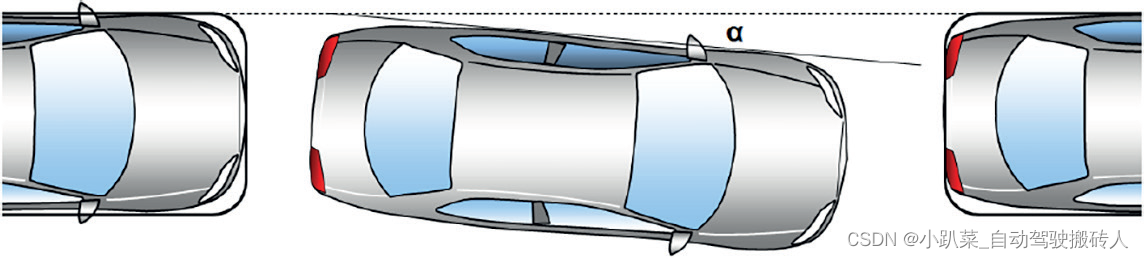
在终点位置,无论侧视镜是否展开,投影在地面上的PAPS车辆轮廓应在目标区域内。每次试验到达终点位置后,测量相对于道路边缘的倾斜角θ。平行停车场边线定义如图所示。
参数说明:
1 —— 目标泊车区域
2 —— 车辆中心线
倾斜角度θ的要求:
1. 倾斜角度应-3°≤θ≤3°。
2. 倾斜角度θ的标准差应不大于1.5°。
垂直空间车位
用于测试的两辆边界车辆在尺寸上应与装备PAPS车辆相似。目标区域由4条线划分,如图所示。L1平行于左侧边界车辆的边界对应线,距离0.3 m, L3平行于右侧边界车辆的边界对应线,距离0.3 m。L2和L4平行于相邻车辆的前后线,距离0.4 m。在终点位置,无论侧视镜如何,投射在地面上的PAPS车辆轮廓应在目标区域内。每次试验到达终点位置后,测量相对停车位的倾斜角(θ)。目标区域的定义和垂直车位的角度对准如图所示。

参数说明:
1 —— 目标泊车区域
2 —— 车辆中心线
Lv —— 边界参考车长度
BVp —— 参考车外边缘
倾斜角度θ的要求:
1. 倾斜角度应-3°≤θ≤3°。
2. 倾斜角度θ的标准差应不大于1.5°。
针对此场景下的泊出要求为:能让驾驶员安全进入车辆。并无明确且可测的指标。
垂直线车位
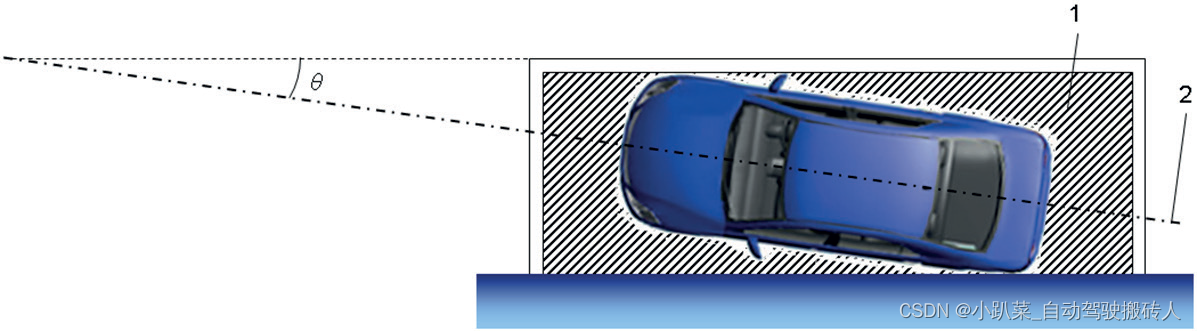
&esmp;PAPS将车辆引导到目标停车场。车辆停车时应停在绘线划定的停车场内。汽车制造商可以根据他们的目标系统性能来定义公差要求。系统性能定义为相对于停车场线的倾斜角(θ)和停车完成时的“偏差”。在终点位置,无论侧视镜如何,投射在地面上的PAPS车辆轮廓应在目标区域内。垂直停车场目标区定义及角度对准如图所示。
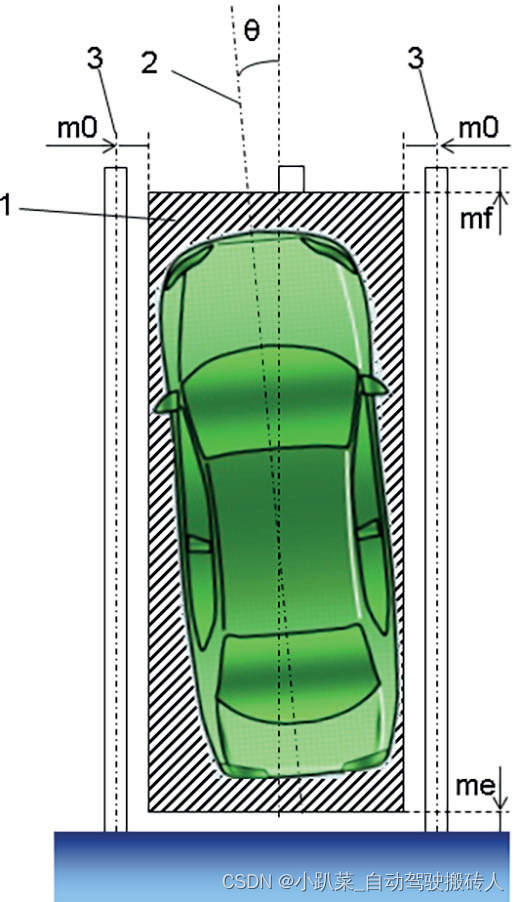
参数说明:
1 —— 目标泊车区域
2 —— 车辆中心线
3 —— 车位中心线
m0 = 0.1m
me = 0.1~0.2m
mf = 0~0.1m
me+mf = 0.2m
倾斜角度θ的要求:
1. 倾斜角度应-3°≤θ≤3°。
2. 倾斜角度θ的标准差应不大于1.5°。
针对此场景下的泊出要求为:能让驾驶员安全进入车辆。并无明确且可测的指标。
车库车位
车库车位需驾驶员自行将PAPS车辆放置在目标车库入口的初始位置。初始位置应由制造商任意定义。接下来由PAPS把车开进车库。停车完毕后,车辆应停在车库内。在这种情况下,带侧视镜的PAPS车辆的轮廓应保持在目标停车区域内。系统性能定义为相对于车库中心线的倾斜角(θ)和停车完成时的“偏差”。目标停车区域的定义和角度对准如图所示。
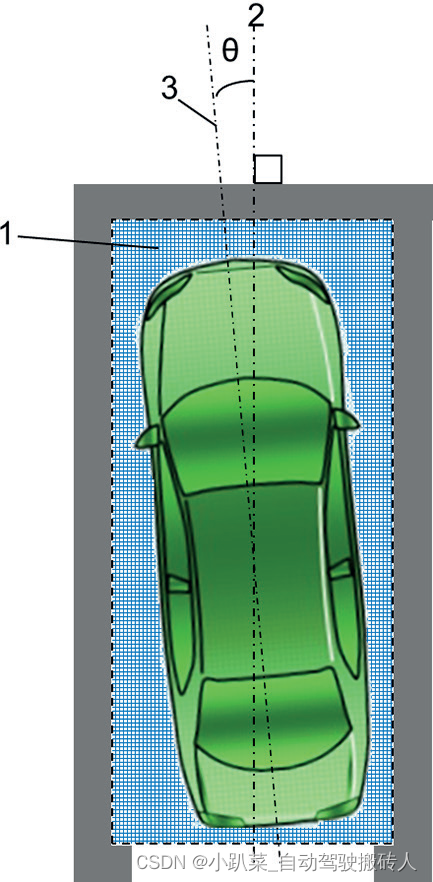
参数说明:
1 —— 目标泊车区域
2 —— 车库车位中心线
3 —— 车辆中心线
倾斜角度θ的要求:
1. 倾斜角度应-3°≤θ≤3°。
2. 倾斜角度θ的标准差应不大于1.5°。
针对此场景下的泊出要求为:能让驾驶员安全进入车辆。并无明确且可测的指标。