目录
一、抢占式多任务
二、代码实现
三、上板测试
本节的代码在仓库的 06_Preemptive_Muti_Task 目录下,仓库链接:riscv_os: 一个RISC-V上的简易操作系统
本文代码的运行调试会在前面开发的RISC-V处理器上进行,仓库链接:cpu_prj: 一个基于RISC-V指令集的CPU实现
在第五节的内容中,我们实现了协作式多任务,这一节我们要实现的是抢占式多任务。
一、抢占式多任务
我们先回忆一下协作式和抢占式多任务的概念。
- 协作式多任务(Cooperative Mutitasking):协作式环境下,下一个任务被调度的前提是当前任务主动放弃处理器。
- 抢占式多任务(Preemptive Multitasking):抢占式环境下,操作系统完全决定任务调度方案,操作系统可以剥夺当前任务对处理器的使用,并且将处理器提供给其他任务。
可以看到,在协作式多任务中,需要用户程序主动放弃处理器,其他程序才能运行,这种调度方式十分不合理(万一有一个用户程序不懂谦让,那整个系统就乱了)。
而在抢占式多任务中,任务的调度完全由操作系统决定,采用统一的调度方式,这样就防止了某些用户程序不释放处理器。
在这一节,我们会利用第七节实现的硬件定时器来实现简单的抢占式调度(每个任务运行一个 tick 的时间)。
二、代码实现
大致步骤如下,当中断发生时,进入 trap_handler 函数,如果是定时器中断则进入 timer_handler 函数,在 timer_handler 函数中调用了 schedule 函数,从而实现任务切换的效果:
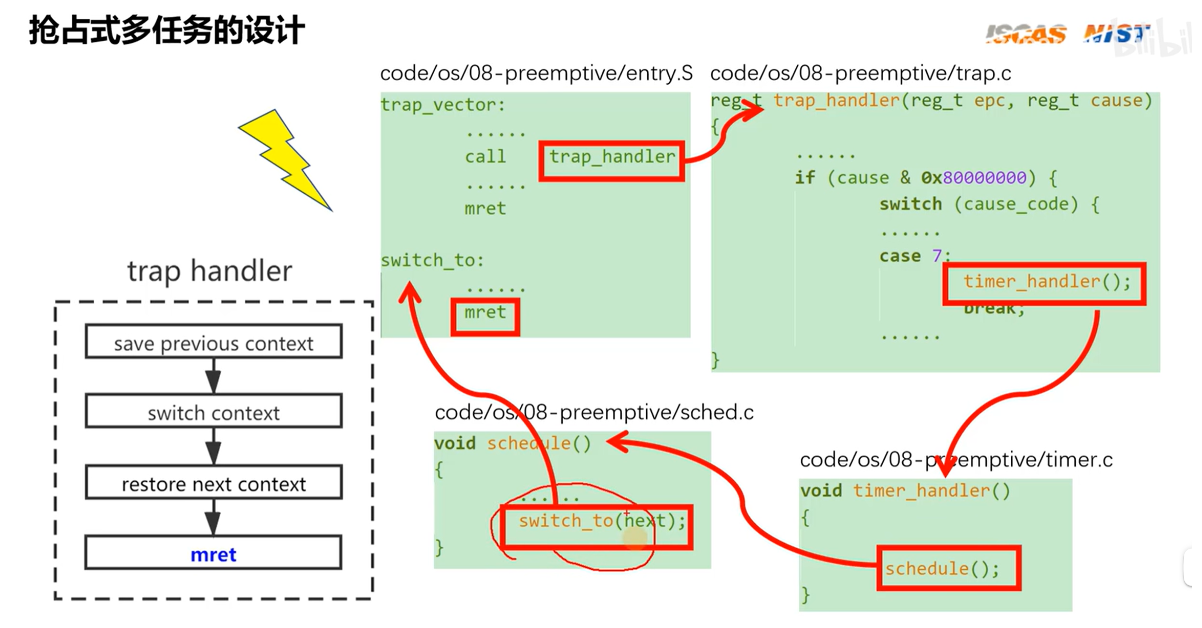
timer_handler 函数代码如下:
void timer_handler()
{
timer_write_reg(TIMER_CTRL, (timer_read_reg(TIMER_CTRL) & ~(TIMER_INT_PENDING)));
_tick++;
printf("tick: %d\n", _tick);
timer_load(TIMER_INTERVAL);
schedule();
}和之前不同的是,context 上下文还需要额外保存 mepc 值,switch_to 函数最后的返回由 ret 改成了 mret(这样switch_to 函数就不需要返回,直接通过 mret 跳转到下一个任务上下文的 mepc 处执行)。
# void switch_to(struct context *next);
# a0: pointer to the context of the next task
.globl switch_to
.align 4
switch_to:
# switch mscratch to point to the context of the next task
csrw mscratch, a0
# set mepc to the pc of the next task
lw a1, 124(a0)
csrw mepc, a1
# Restore all GP registers
# Use t6 to point to the context of the new task
mv t6, a0
reg_restore t6
# Do actual context switching.
# Notice this will enable global interrupt
mret
.end三、上板测试
将程序烧录到板子上后,打开串口调试助手,现象如下:
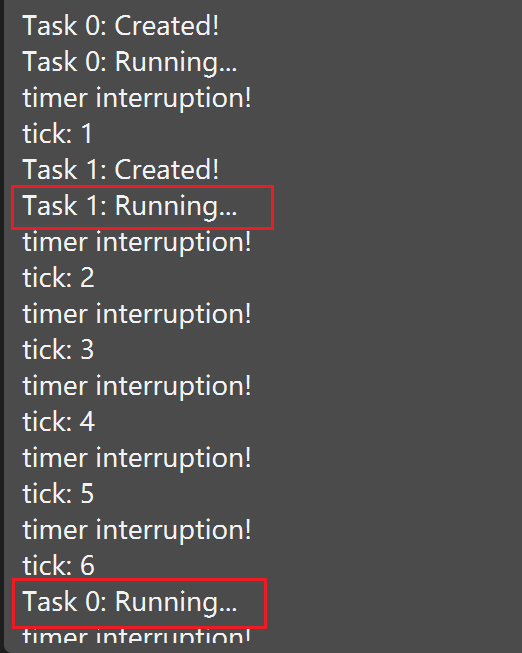
可以看到任务随着 tick 的增加而切换。