文章目录
- 一. Dalsa相机软件整体架构
- 二. 相机编号说明以及软件要求
- 三. 相机硬件参数
- 三. 相机基本参数
- 四. 软件参数设置列表
- 1. Sensor Control Category
- 2. I/O Control Category
- 3. Counter and Timer Control Category
- 4. Advanced Processing Control Category
- (1) 平场校正介绍
- (2) 平面场校正算法描述
- (3) 平场校正文件
- (4)平场校正调节方法
- 5. Image Format Control Category
- Binning解释
- 6. Acquisition and Transfer Control Category
- Acquisition Buffering
一. Dalsa相机软件整体架构

二. 相机编号说明以及软件要求

三. 相机硬件参数
- 相机接口


- 相机DB15引脚定义

- 相机外型尺寸图

三. 相机基本参数
-
相机整体参数

-
传感器参数

最高采样帧率情况下每帧时间:1/4500010001000=22us -
传感器中感光单元的排列方式
双线性彩色相机基于Teledyne DALSA的双线性CMOS传感器,并设计为使得该双线传感器的第一行具有红色(R)和蓝色(B)交替像素,而第二行具有所有绿色(G)像素。G通道可以用作单色输出。

传感器线路之间没有间隔。当图像经过两行像素时,同一图像位置的红/蓝和绿分量在不同的时间被捕获,如行间距所指示的。相机会自动校正行间距,以确保输出时图像像素的红/蓝和绿分量都对齐。然而,只有当对象像素大小为正方形时,这才是正确的;即对象在一个EXSYNC周期内移动的距离等于对象像素的宽度。 -
相机伪影校正

在某些应用中,可能无法实现“方形”物体像素作为透镜放大率和/或距离的微调.当无法生成方形对象像素时,颜色伪影将在扫描方向上发生,并且在尖锐的边缘过渡处尤为明显。边缘伪影的大小与像素离正方形的距离成比例。为了纠正这一点,相机有一个功能,即线空间校正,它允许对相机用于校正线间距的补偿机制进行微调。此功能的默认设置为1,它是为方形对象像素设置的。该设置可以从0调整到3,以补偿矩形像素——无论它们是太长还是太短。以下图像伪影的示例示出了应用特定空间设置之后的从黑到白的图像转换以及相关联的校正图像。

当摄影机不垂直于对象表面时,它将显示颜色。当相对于成像平面的相机以陡峭的角度成像时,视差失真增加。这是由三种单独颜色的行间距引起的光学效果。这种间距导致在高角度下每条线的放大率不同。如下图所示,在图像的两端有颜色失真,但在图像的中心没有显示颜色失真。
使用相机视差校正功能,可以调整每条线的光学放大率,以便在不影响中心的情况下,将颜色排列在图像的末端。使用“图像失真校正模式”功能可以打开此功能。使用“图像扭曲校正线选择器”功能,用户可以选择红色和绿色来校正失真。笔记红色和绿色线将调整为与中心蓝色线对齐。图像失真

四. 软件参数设置列表
- Camera Information Category:可以通过控制应用程序检索相机信息。读取相机型号、固件版本等参数,以唯一识别连接的Linea GigE设备。这些功能通常是只读的。GigE Vision应用程序检索这些信息以识别相机及其特性。
- Sensor Control Category:Linea GigE传感器控制将传感器特定功能分组。该组包括对线速率、曝光时间等的控制。灰色参数是只读的,无论是始终还是由于另一个功能被禁用。黑色参数由用户在CamExpert中设置或通过成像应用程序进行编程。
- I/O Control Category:Linea GigE I/O控制将用于配置外部输入和基于这些输入的采集操作的功能分组,以及到其他设备的摄像头输出信号。灰色参数是只读的,无论是始终还是由于另一个参数被禁用。黑色参数由用户在CamExpert中设置或通过成像应用程序进行编程。
- Counter and Timer Control Category:Linea GigE计数器和计时器控件对用于配置各种输入线和信号边缘检测的采集计数器和计时器的参数进行分组。灰色参数是只读的,无论是始终还是由于另一个参数被禁用。黑色参数由用户在CamExpert中设置或通过成像应用程序进行编程。
- Advanced Processing Control Feature Descriptions:Linea GigE高级处理控件,如CamExpert所示,对用于配置平面场校准的参数进行分组。灰色参数是只读的,无论是始终还是由于另一个参数被禁用。黑色参数由用户在CamExpert中设置或通过成像应用程序进行编程。
- Acquisition and Transfer Control Category:Linea GigE采集和传输控制对用于配置设备可选采集模式的参数进行分组。这些特征提供了将采集耦合到传输(基本模式)或将采集与相机传输模块和主机传输模块二者解耦的机制。
- Event Control Category:Linea GigE事件控件对用于配置相机事件相关功能的参数进行分组。灰色参数是只读的,无论是始终还是由于另一个参数被禁用。黑色参数由用户在CamExpert中设置或通过成像应用程序进行编程。
- Linea GigE GigE Vision:传输层控制将用于配置与GigE视觉规范和以太网连接相关的功能的参数分组。灰色参数是只读的,无论是始终还是由于另一个参数被禁用。黑色参数由用户在CamExpert中设置或通过成像应用程序进行编程。
- GigE Vision Transport Layer Feature Descriptions:介绍了这些参数及其视图属性和所需的最低相机固件版本。此外,设备版本列将指示哪个参数是DALSA功能命名约定(由DFNC表示)与GenICam标准功能命名约定的成员(SFNC未显示)。
- GigE Vision Host Control Category:用于配置主机系统GigE视觉功能的组参数,用于Linea GigE网络管理。这些参数都没有存储在任何Linea GigE相机中。
- File Access Control Category:CamExpert中的文件访问控制允许用户快速将各种数据文件上传到连接的Linea GigE。支持的数据文件用于Linea GigE固件更新和平面场系数。
1. Sensor Control Category



2. I/O Control Category










3. Counter and Timer Control Category











4. Advanced Processing Control Category



(1) 平场校正介绍
平面场校正函数(FFC)包括每个像素使用两个系数,用于校正相应像素的增益和偏移。这些校正补偿了每个相机传感器特有的光响应不均匀性 (Photo Response Non-Uniformity,PRNU)和固定模式噪声(fixed-pattern noise,FPN)。对于CMOS传感器,必须在与相机使用相同的条件下执行FFC校准。曝光时间和相机内部温度需要与预期操作条件相似,否则CMOS传感器的变化(温度和曝光)将导致FFC校准无效。Linea GigE相机具有多个FFC用户存储空间来存储校准数据,允许用户存储不同优化曝光设置的FFC数据。下图说明了相机的数字处理流程:

(2) 平面场校正算法描述
DALA相机平场校正公式:
n
e
w
P
i
x
e
l
V
a
l
u
e
[
x
]
=
(
s
e
n
s
o
r
P
i
x
e
l
V
a
l
u
e
[
x
]
−
F
F
C
O
f
f
s
e
t
[
x
]
)
∗
F
F
C
G
a
i
n
[
x
]
newPixelValue [x]=( sensorPixelValue [x]- FFCOffset [x]) * FFCGain [x]
newPixelValue[x]=(sensorPixelValue[x]−FFCOffset[x])∗FFCGain[x]
其中:
- [ x ] [x] [x]是平场校正像素坐标。
- n e w P i x e l V a l u e newPixelValue newPixelValue是应用平面场校正后的像素值。
- s e n s o r P i x e l V a l u e sensorPixelValue sensorPixelValue是应用平面场校正之前的像素值。
- F F C O f f s e t FFCOffset FFCOffset是要从 s e n s o r P i x e l V a l u e sensorPixelValue sensorPixelValue中减去的偏移系数值。
- F F C G a i n FFCGain FFCGain是与 s e n s o r P i x e l V a l u e sensorPixelValue sensorPixelValue相乘的增益系数值
- 重要提示: F F C O f f s e t FFCOffset FFCOffset和 F F C G a i n FFCGain FFCGain是根据许多相机特定特征值(不可见 D F N C DFNC DFNC特征)计算得出的衍生因子。直接从平面场系数文件中读取这些值对用户来说毫无意义。
(3) 平场校正文件
平面场系数文件是一个标准的16位TIFF文件。Sapera应用程序(如CamExpert)创建一个新的SapBuffer对象,其宽度与传感器相同,但行数是传感器的两倍。这提供了存储偏移和增益平场校正数据的空间。平场校正偏移数据包含在新缓冲区的上半部分,而增益缓冲区位于下半部分。Sapera应用程序使用SapBuffer::Save和-format-tiff选项保存新的缓冲区,该选项允许在不丢失有效位的情况下保存数据。
重要提示:在校准之前,Linea GigE应通电足够长的时间以达到其标称温度(至少30分钟)。低的环境温度可能会增加相机达到稳定内部温度所需的时间。
重要提示:在校准过程中,不应访问或修改其他Linea GigE功能。
通过CamExpert或用户应用程序进行校准:平场校准期间使用的曝光和帧速率应与相机应用程序中使用的曝光设置类似。
(4)平场校正调节方法
相机校准包括FPN(固定模式噪声)校正、PRNU(光子响应不均匀性)校正、颜色校正等操作。最常用的操作是FPN和PRNU校正。它们统称为平场校正(FFC)。相机校准的目标是在用户的应用程序设置中对均匀的白色物体进行成像时,产生所需级别的均匀、白平衡和颜色校正图像(如果需要)。FFC功能分为高级处理类别。对于颜色校正,可以使用CamExpert提供的工具。

-
准备一个全黑暗和全白色的视野
全白环境:例如干净、均匀照明的白墙或镜头稍微失焦的无光泽纸。理想情况下,应使用直接对准透镜的受控散射光源。
全黑环境:一个镜头盖遮挡。 -
获取全黑环境的像素直方图
合上相机镜头光圈,并用镜头盖盖住镜头。使用CamExpert软件,单击抓取按钮,然后单击直方图按钮。下图显示了Linea GigE软件抓取暗图像的典型直方图。

在本例中,帧的平均像素值接近黑色。还要注意,由于一个或多个“热像素”,传感器可能会显示出更高的最大像素值。 -
获取全白环境的像素直方图,根军直方图调整镜头光圈
将相机对准漫射光源或均匀照明的白色墙壁,确保上面没有阴影。使用CamExpert软件,单击抓取按钮,然后单击直方图按钮。调整镜头光圈,使直方图中像素平均值约为200左右的亮灰色(对于8位像素)。下图显示了Linea GigE软件抓取亮灰色图像的典型直方图。

重要提示:在此示例中,帧的平均像素值为亮灰色。还要注意的是,由于一个或多个“热像素或死像素”,传感器可能显示出更高的最大像素值或更低的最小像素值。传感器规格考虑了少量的热像素、卡住像素或死像素(在为该传感器指定的整个动态范围内对光没有反应的像素)。 -
在执行FFC之前,我们强烈建议您评估“裸图像”特性。裸图像质量决定将应用于图像的FFC的质量。要获得裸图像,请禁用FPN、PRNU和颜色校正系数,将白平衡、红色、绿色和蓝色增益设置为1x,并将系统增益设置为1x。
通过在
Advanced Processing类别下的Color Transformation Matrix Selector选项中选择“NoCorrectionFactorySet”来禁用颜色校正系数

将红色、绿色和蓝色增益设置为1x。在Sensor Control category类别下的Gain Selector中逐个选择四个选项


-
从
Flat Field Correction Mode中选择off

-
相机现在可以制作裸图像了。可以通过线条轮廓工具评估裸图像质量。
以下是白色均匀对象的裸图像的示例线轮廓

线形是否良好主要由三个因素决定:
1) Flatness平坦度:在这种情况下,由于线条轮廓代表平坦的场,因此越平坦越好。然而,由于透镜的明暗处理效果,光线会向边缘衰减,导致边缘输出低于中心区域输出。这导致边缘的噪声水平高于应用FFC的图像中的中心区域。较小的光圈开口和较长的焦距可以减少镜头的阴影效果。在一些要求苛刻的应用中,应考虑优化的低遮光透镜2)Height高度:平均输出水平越接近校准目标越好。如果电平高于目标是可以的,但不希望比目标低得多。与目标相比,在校正PRNU后,极低的输出将使噪声电平显著升高,从而使SNR和/或DNR可能无法满足应用程序的要求。为了避免这种情况,轮廓应达到尽可能接近校准目标的水平。为了调整轮廓高度,曝光时间、光强、光圈开口(这可能与平面度相冲突)和透镜吞吐量指数等都是需要考虑的因素。毕竟,所有这些的目的都是为了增强照明。
3) Matching匹配:三个RGB线条轮廓彼此越接近越好。颜色之间的较大间隔表示颜色之间的噪声水平不同。从理论上讲,最好是三种配置文件都匹配。然而,在实践中,它们没有必要完全重叠,只需要你试着让它们尽可能靠近。不同波长范围的光会影响匹配程度。因此,需要考虑应用程序中使用的过滤器。如果尽管做出了上述努力,你仍然没有达到目标,那么是时候使用增益功能了。您可能希望使用白平衡增益将每种颜色的峰值调整为类似的DN值,并使用系统增益将三种颜色的峰强度调整为所需的DN级别。请记住,从SNR的角度来看,增益的改变根本不会提高图像质量。所有增益都是数字乘法器,因此,增益会放大信号和噪声
请记住以下几点:
1.确保摄像头的温度处于稳定状态。这可能需要在通电后30分钟或更长时间。
2.所有参数应符合您的应用规范。如果在FFC完成后更改参数,则FFC结果将不再相关。当参数发生变化时,应考虑重新运行FFC。 -
FPN Correction
步骤1:盖上镜头(将传感器置于黑暗中)。
步骤2:从Flat Field Correction Mode下拉菜单中选择off,然后检查线条轮廓/直方图。如果部分或全部像素输出为零,则应调整黑电平偏移值,以确保所有像素的输出都在零以上。黑电平偏移调整位于Sensor Control category类别中

步骤3:从
Flat Field Correction Mode下拉菜单中选择Calibration。

步骤4:从
Flat Field Calibration Sample Size中选择4096或2048。4096选项返回更准确的结果;而2048选项减少了计算时间。
步骤5:按下Calibrate FPN(校准FPN)菜单中的Press…(按下…)命令。

-
PRNU校正
步骤1。在相机视野内放置一个一个白色平面目标。使用纸张的结果可能产生所谓的颗粒效应,即在抓取的图像中显示可见的垂直线。有两种常见的方法来校正颗粒效应:
1)在进行PRNU校正时保持物体移动。
2)在执行PRNU校正时对镜头进行散焦,并在完成后重新聚焦。
从平面场校正模式下拉菜单中选择off,然后检查裸图像线轮廓。我们将使用上图作为示例,并假设它是可以接受的。步骤2。从
m Flat Field Correction Mode下拉菜单中选择Calibration。
步骤3。从Calibration Algorithm(校准算法)下拉菜单中选择Basic (in general, otherwise select Low Pass Filter)。
步骤4。如有必要,调整平场校准目标(DN)中的校准目标。200DN是常用的典型目标。该目标值可以高于或低于从裸图像中观察到的峰值。
步骤5。从平面场校准样本大小下拉菜单中选择4096或2048。
步骤6。按下Calibrate PRNU(校准PRNU)菜单中的Press…(按下…)命令。

步骤7。从Flat Field Correction Mode下拉菜单中选择Active,将校准的FPN和PRNU参数应用于未来成像。您可以使用线路配置文件检查结果

如上所述,PRNU校正功能不仅执行了平场校正,还执行了白平衡。
步骤8。您可能希望保存FFC结果以备将来使用。如果不保存,一旦相机断电,FFC结果就会丢失。单击Camera Information类别中的Powerup Configuration parameter参数中的Setting…

在Power-up Configuration对话框中,为Camera Power-up configuration和Load / Save configuration选择四个UserSets之一,然后按Save按钮。这将确保下次打开相机时相机加载保存的参数。

5. Image Format Control Category




Binning解释
Binning是将两个(或多个)相邻像素上的电荷组合在一起的过程。这导致光灵敏度增加,因为捕获光子的传感器面积是传感器面积的两倍。传感器空间分辨率降低,但是改进的低光灵敏度加上较低的信噪比可以解决困难的成像情况。用户可以使用CamExpert在Linea GigE上评估装仓函数(因子为2x)的结果。
Linea GigE独立支持水平和垂直装箱。在相机内的多条采集线上执行垂直装仓。因此,当启用装仓时,虚拟帧缓冲区的高度会自动减小。还要注意,装仓是以数字方式执行的,因此采集线速率没有增加。下图说明了装箱

6. Acquisition and Transfer Control Category

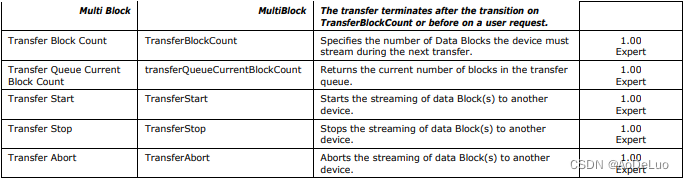
Acquisition Buffering
所有采集都在内部进行缓冲,并尽可能快地传输到主机系统。该内部缓冲区允许不间断的采集,无论可能发生任何传输延迟(例如采集速率快于千兆以太网链路或IEEE Pause帧)。只有当内部缓冲区被消耗时,才会生成图像丢失事件。该相机有一个256MB的块。存储器的一部分可以保留用于数据包重新发送,但会丢失累积帧