文章目录
- 一、正反欧拉角定义
- 二、相关文献阐述
- 三、对正反欧拉角的思考
- 四、参考代码
- 五、参考文献
最近看到有人讨论“双欧拉角”或者“正反欧拉角”的问题,因为自己之前没听说过这个概念,为了避免无知,因此找了一些文献进行学习和理解。不过基于我目前的理解,个人认为用处不是很大。感兴趣的话,简单了解即可。
一、正反欧拉角定义
假设导航系为“东北天ENU”,载体坐标系为“右前上xyz”。参考严恭敏老师的文章双欧拉角用于飞控问题,可知正反欧拉角定义如下:
常规飞机姿态角即为正欧拉角:航向角是机头y轴与北向夹角、俯仰角是机头y轴与水平面夹角、横滚是z轴与y轴所在铅垂面的夹角。
反欧拉角的含义为:航向角是机右翼x轴与东向夹角、俯仰角是机右翼x轴与水平面夹角、横滚是z轴与x轴所在铅垂面的夹角。(对我来说,这样的姿态角定义非常陌生…)
对于常用的正欧拉角(姿态角),计算旋转矩阵时,旋转顺序为航向、俯仰、横滚。

因此当在俯仰接近±90°时,会出现奇异。此时航向和横滚无法分开,在解算时算式的分母为0,无法计算。当然在实际中由于误差的存在,分母并不完全为0,会计算出来一些跳点。因此在俯仰接近或等于90度时,横滚和航向值无法进行表示。
二、相关文献阐述
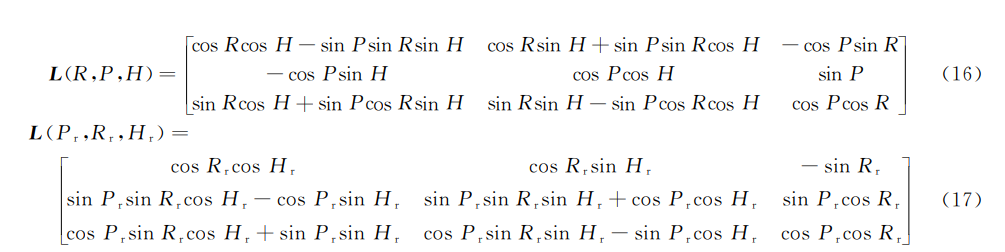
由文献2可知,正欧拉角的旋转顺序为“航向-俯仰-横滚”,当俯仰为±90°时出现奇异值;反欧拉角的旋转顺序为“航向-横滚-俯仰”,当横滚为±90°时出现奇异值。但是由于两个坐标系之间的旋转矩阵是唯一的,因此矩阵中的对应项相等。
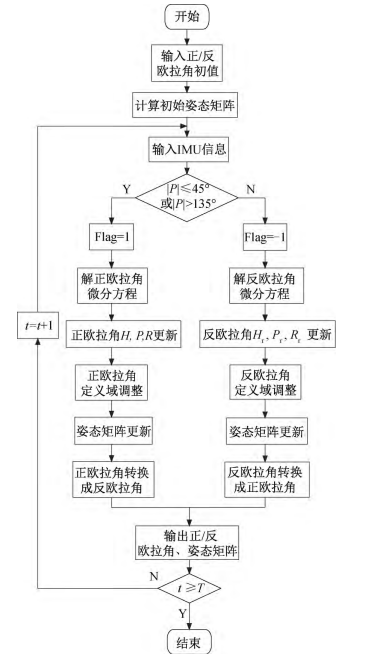
作者的正反欧拉角切换思路为:
三、对正反欧拉角的思考
参考文献[2]认为双欧拉角的导航精度相对于四元数方法更高,这个我不太理解。作者采用欧拉角微分方程进行更新,四元数法采用的是四元数微分方程更新。四元数法本身并不存在奇异值的问题,内部的所有计算并没有用到姿态角。将四元数折算成欧拉角,不过是给外部展示而已。我不太明白为什么双欧拉角法精度会更高。
此外,对于外部姿态角的展示,四元数法计算得到四元数,完全可以根据需求折算为正欧拉角或者反欧拉角,甚至其他欧拉角。
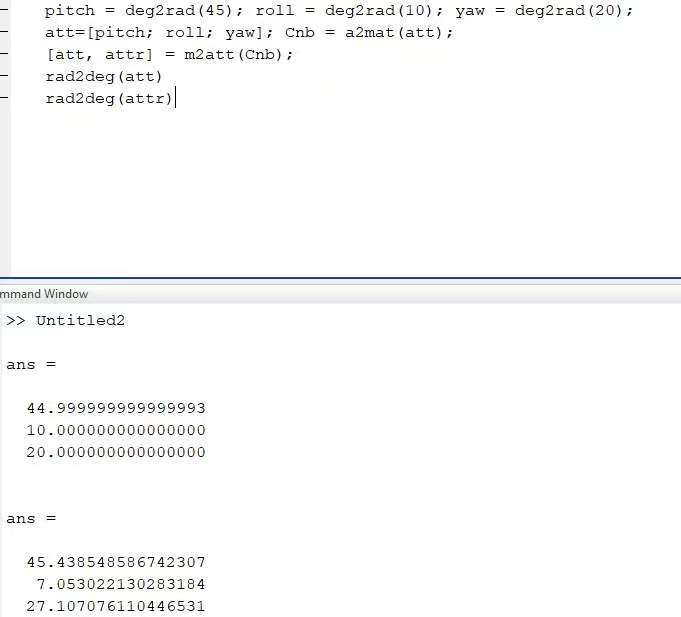
在严恭敏老师PSINS工具箱有根据旋转矩阵计算正反欧拉角的函数m2att。我尝试一下用PSINS中的函数计算正反欧拉角,显然当正、反欧拉角切换时,由同一个旋转矩阵计算出来的正反欧拉角的值是不同的。因此如下图所示,显示的姿态角会不连续,产生跳变。
由以上分析,对于使用正、反欧拉角,如果是出于精度目的,我并不觉得四元数方法精度较差;如果出于显示目的,我觉得姿态角切换会跳变,而且反欧拉角定义对常人来说比较难理解,对使用者来说也会有很大困难;如果是出于飞控目的,可以直接使用四元数做飞控,而不是姿态角。 虽然目前我并没有感受到它有用的地方,不过这种思维方式还是比较有趣且值得学习的。
四、参考代码
严恭敏老师PSINS工具箱,根据旋转矩阵计算正反欧拉角的函数m2att:
function [att, attr] = m2att(Cnb)
% Convert direction cosine matrix(DCM) to Euler attitude angles.
%
% Prototype: [att, attr] = m2att(Cnb)
% Input: Cnb - DCM from navigation-frame(n) to body-frame(b)
% Outputs: att - att=[pitch; roll; yaw] in radians, in yaw->pitch->roll
% (3-1-2) rotation sequence
% attr - in yaw->roll->pitch (3-2-1) rotation sequence
% Test:
% att0=randn(3,1)/10; [Cnb,Cnbr]=a2mat(att0); att=m2att(Cnb); [~,attr]=m2att(Cnbr); [att0, att, attr]
%
% See also a2mat, a2qua, m2qua, q2att, q2mat, attsyn, m2rv, incline.
% Copyright(c) 2009-2014, by Gongmin Yan, All rights reserved.
% Northwestern Polytechnical University, Xi An, P.R.China
% 21/02/2008
att = [ asin(Cnb(3,2));
atan2(-Cnb(3,1),Cnb(3,3));
atan2(-Cnb(1,2),Cnb(2,2)) ];
if nargout==2 % dual Euler angles
attr = [ atan2(Cnb(3,2),Cnb(3,3));
asin(-Cnb(3,1));
atan2(Cnb(2,1),Cnb(1,1)) ];
end
五、参考文献
[1] 赵仁杰,胡柏青,吕旭,田佳玉.基于双欧拉角的UKF组合导航滤波算法[J].系统工程与电子技术,2021,43(07):1912-1920
[2] 吕维维, 程向红, 邱伟. 基于弹载捷联惯性导航系统精确导航的双欧拉全姿态方法[J]. 上海航天, 2019, 36(1):9.