motive:启动→载入已有→layout选择capture→view选择data streming→复选marker右键create刚体→rename刚体→修改local interface为本机ip→勾选vrpn
ROS端:roslaunch vrpn_client_ros vrpn_efy.launch 记得修改server地址为motiveip地址
关掉motive所在的防火墙,如果能ping通但是没办法用vrpn_client接收数据,实在是发现不了问题的话,重启ROS所在的虚拟机和主机试试。
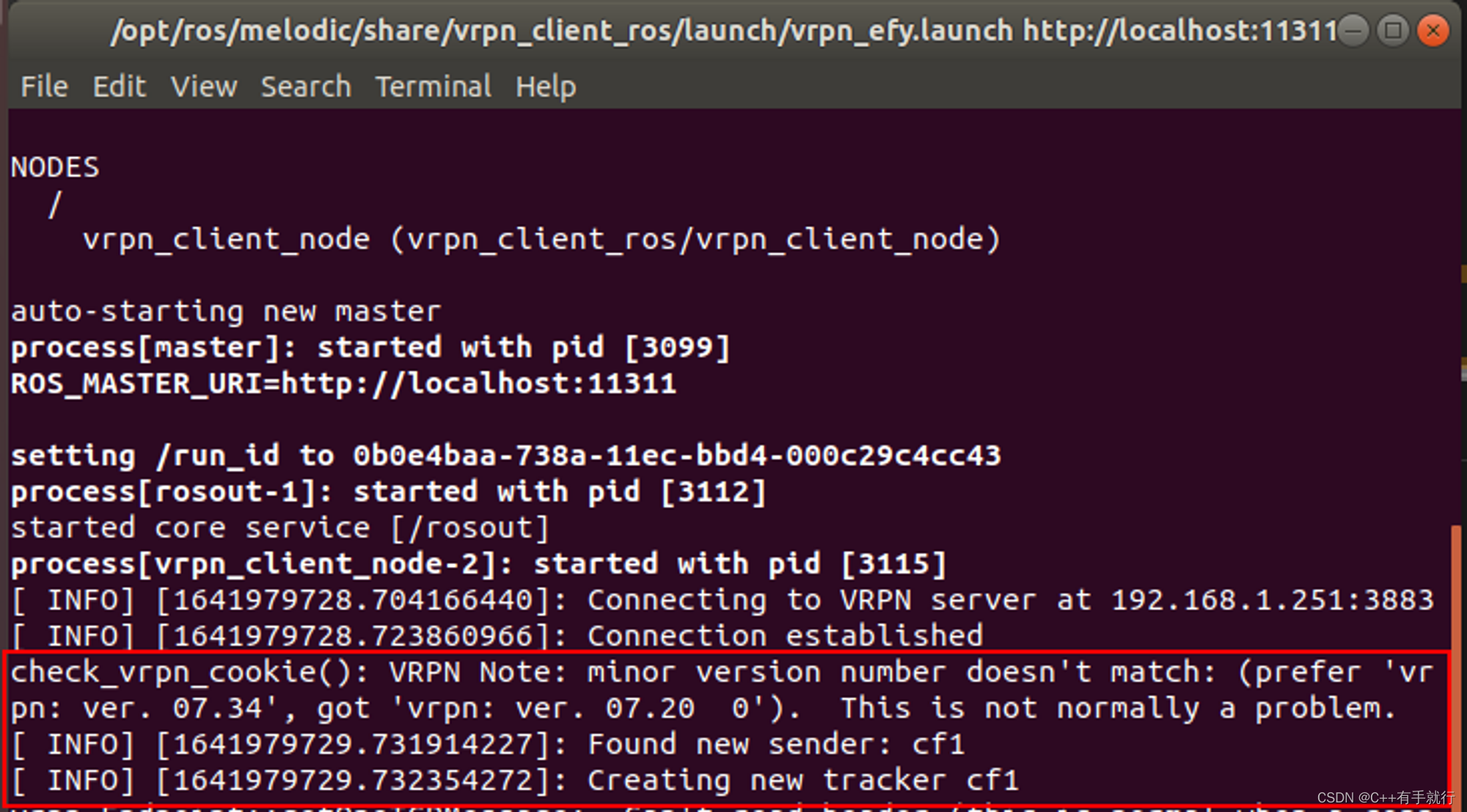

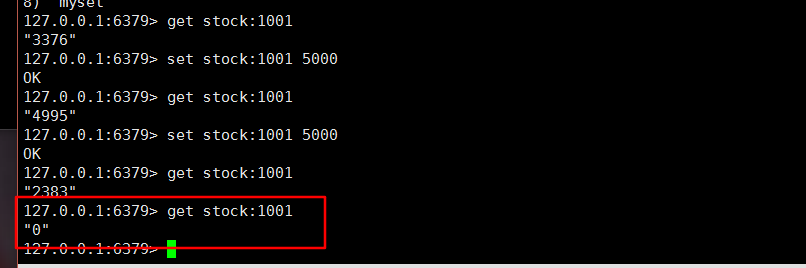
出现红框内容就连上啦(vrpn_client_ros) 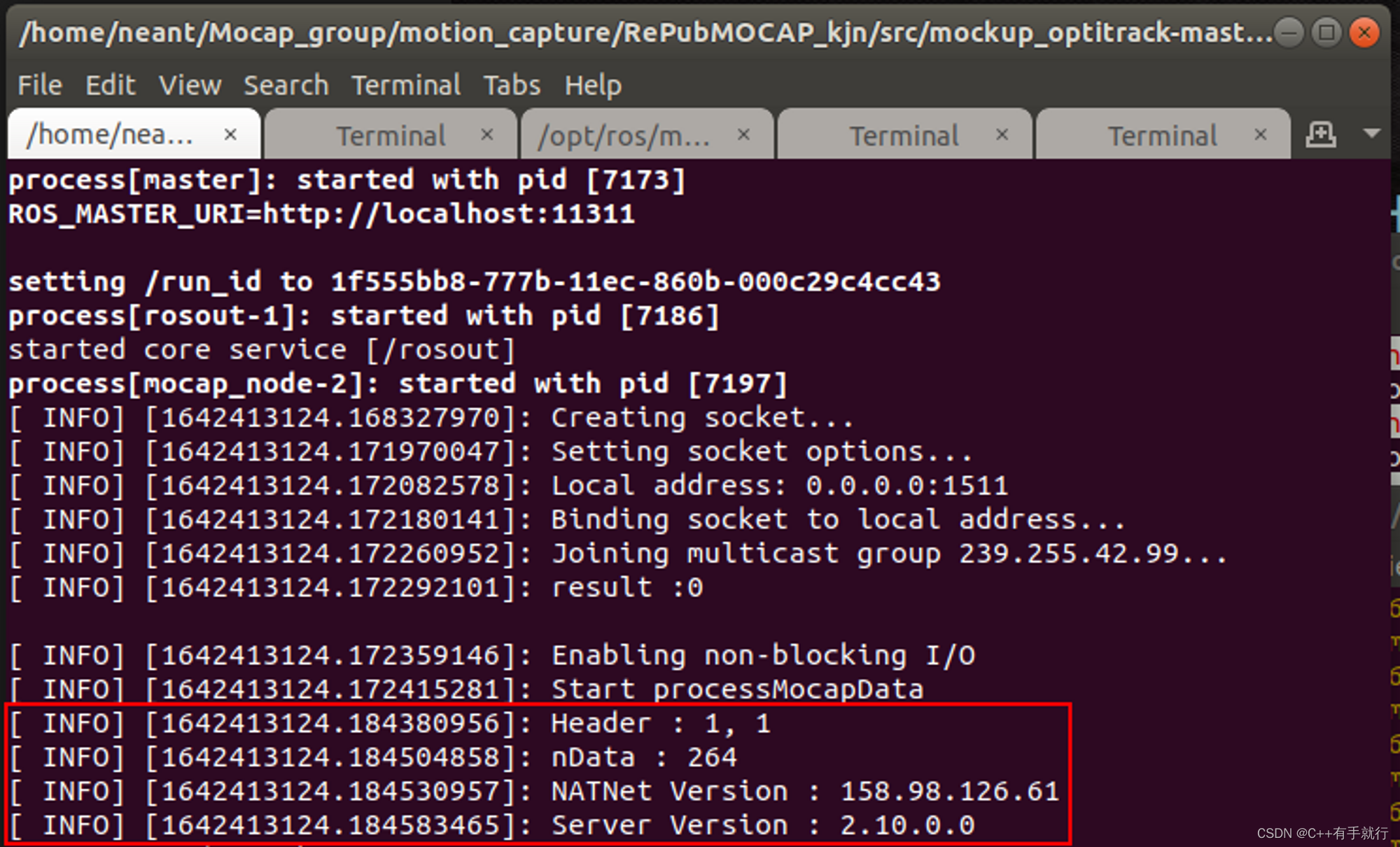
出现红框内容就连上啦(mocap_optitrack)