经纬度与ECEF直角坐标的基本换算
我们目前最常用的全球坐标系是WGS-84坐标系,各种手机、地图基本用经纬度来标记位置。然而,经纬度对于空间的计算是很复杂的,需要很多三角函数操作。平面直角坐标系利用向量的运算,可以非常方便的计算角度、距离等参数,在实际应用中往往作为中间计算的工具。
目前用到的很多GIS、遥感与测绘工具里都有这种功能,比如利用 libproj、RTK等工具,直接进行转换。
文章目录
- 经纬度与ECEF直角坐标的基本换算
- 1. WGS-84 坐标系
- 2 从经纬度转换到ECEF
- 3 从 ECEF 到经纬度
- (1) 求取经度
- (2) 纬度、海拔计算
- 4 代码与工程
1. WGS-84 坐标系
WGS-84 坐标系是目前使用最为广泛的全球坐标系统。其示意图如下:
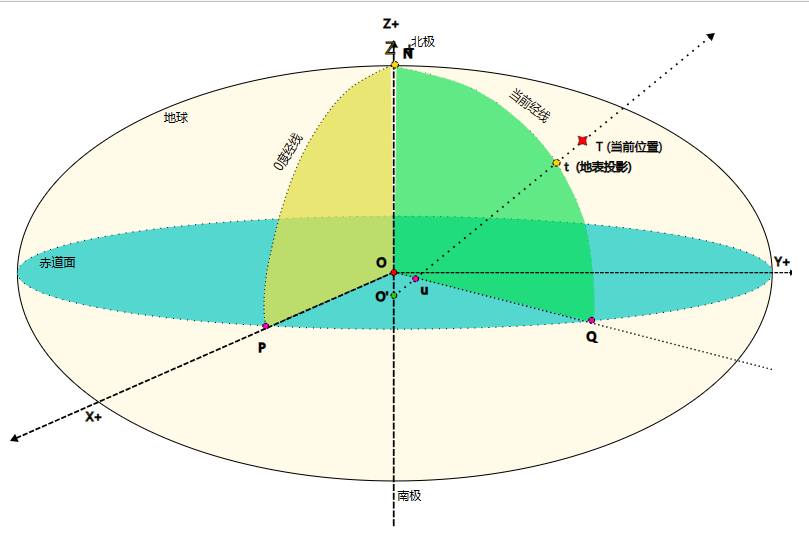
WGS-84坐标系里,地球等效为一个椭圆,直角坐标系原点O位于地球的中心。
- 坐标轴 Z ⃗ = O N ⃗ \vec{Z} =\vec{ON} Z=ON 指向北极点。
- 坐标轴 X ⃗ = O P ⃗ \vec{X} =\vec{OP} X=OP 指向格林威治0度经线与赤道面的交点P。
- 坐标轴 Y ⃗ = X ⃗ ⊗ Z ⃗ \vec Y=\vec X\otimes \vec Z Y=X⊗Z 呈右手螺旋关系。
当前位置 T 的经纬度定义:
从高度 H 开始定义:
- T是一个距离参考海平面(椭球面)高度为 H ⃗ = t T ⃗ \vec{H} =\vec{tT} H=tT 的点。
- t是点T在椭球面上的正射投影,矢量 t T ⃗ \vec{tT} tT 是椭球面上t点切面的法向量。
- 需要注意的是,和正球面不同,法向量 t T ⃗ \vec{tT} tT 的反向延长线与Z轴的交点是 O’,和原点O并不重合。
对于经度 θ \theta θ 的定义,是这样的:
- 0度经度大圆 N O P ⌢ \stackrel\frown{NOP} NOP⌢是由北极点 N, 地心 O, 格林威治经线与赤道面的交点 P 组成的平面。
- 当前经度大圆 N O ′ T ⌢ \stackrel\frown{NO'T} NO′T⌢是由北极点 N, 交点O’, 当前位置T组成的平面。
- O、 O’ 、t、 T 都在当前经度面上,直线 O’T 与赤道面的交点为u,矢量 O u ⃗ \vec{Ou} Ou 与赤道的交点是Q。
- O’、u、t、T四点共线。
- 经度 θ = ∡ P O Q \theta=\measuredangle {POQ} θ=∡POQ
对于纬度 φ \varphi φ 的定义,是这样的:
- 椭球的切平面的法线与Z的交点 O’ 和原点并不重合。
- 纬度定义为法向量 u T ⃗ \vec{uT} uT 与赤道面的夹角。在北半球为正,南半球为负
- 纬度 φ = ∡ T u Q = ∡ O u O ′ \varphi=\measuredangle {TuQ}=\measuredangle {OuO'} φ=∡TuQ=∡OuO′
2 从经纬度转换到ECEF
- ECEF 坐标系有利于利用矢量计算简化角度、距离的求取。
已知:
- 赤道半径 a = 6378137 米,对应上图 O P ⃗ \vec{OP} OP的长度;
- 椭球扁率 f = ( a − b ) / a f = (a-b)/a f=(a−b)/a= 1.0/298.257223563。扁率就是衡量椭球是不是很“扁”,正球的扁率为0.
- 椭球偏心率 e = a 2 − b 2 / a e={\sqrt {a^2-b^2} }/{a} e=a2−b2/a= 0.0818191908426
- e和f的关系为 e 2 = f ( 2 − f ) e^2=f(2-f) e2=f(2−f)
- 极地半径 b = 6356752.3142 米,对应上图 O N ⃗ \vec{ON} ON的长度;
设:经度 θ \theta θ, 纬度 φ \varphi φ, 海拔 H,则有:
r = ∣ R ⃗ ∣ = ∣ O ′ t ⃗ ∣ = a 1 − e 2 sin 2 φ = a 1 − f ( 2 − f ) sin 2 φ r = \left | \vec R\right |=\left | \vec{O't} \right | = \frac{ a}{\sqrt{1-e^2 \sin^2\varphi }} =\frac{ a}{\sqrt{1-f(2-f) \sin^2\varphi }} r= R = O′t =1−e2sin2φa=1−f(2−f)sin2φa
经纬度极坐标可以利用矢量 R ⃗ \vec R R 构造一个Z轴平移了的正球,进行极坐标运算。这个正球的球心是 O’。由于x,y没有平移,故而两个坐标系的x、y是重合的。Z坐标z’与z的关系是平移,平移量为OO’的长度:
∣ O O ′ ⃗ ∣ = r e 2 sin φ \left | \vec {OO'} \right | = re^2\sin \varphi OO′ =re2sinφ
下图是把经度大圆 N O Q ⌢ \stackrel\frown {NOQ} NOQ⌢切割出来,观察:
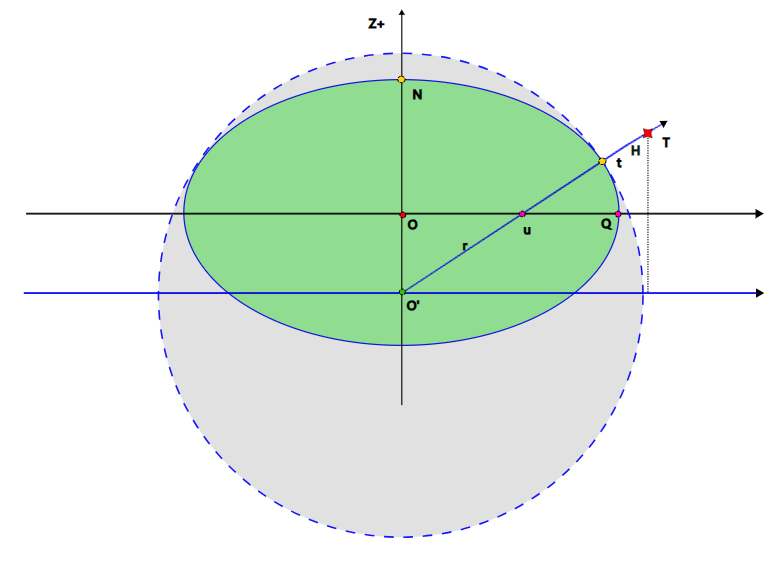
在正球模型下,根据极坐标的基本定义,可以直接计算x,y:
x = ( r + H ) ⋅ cos φ ⋅ c o s θ x=\left ( r + H \right ) \cdot \cos \varphi \cdot cos \theta x=(r+H)⋅cosφ⋅cosθ
y = ( r + H ) ⋅ cos φ ⋅ s i n θ y=\left ( r + H \right ) \cdot \cos \varphi \cdot sin \theta y=(r+H)⋅cosφ⋅sinθ
Z的坐标,要先计算后,再平移即可得到:
z
′
=
(
r
+
H
)
⋅
s
i
n
φ
z'=\left ( r + H \right ) \cdot sin \varphi
z′=(r+H)⋅sinφ
z
=
z
′
−
r
e
2
sin
φ
z=z' - re^2\sin \varphi
z=z′−re2sinφ
带入后,可写成如下等效形式:
z
=
(
r
(
1
−
e
2
)
+
H
)
sin
φ
z=(r(1-e^2)+H) \sin \varphi
z=(r(1−e2)+H)sinφ
z
=
(
r
(
1
−
f
(
2
−
f
)
)
+
H
)
sin
φ
=
(
r
(
1
−
f
)
2
+
H
)
sin
φ
z=(r(1-f(2-f))+H) \sin \varphi =(r(1-f)^2+H) \sin \varphi
z=(r(1−f(2−f))+H)sinφ=(r(1−f)2+H)sinφ
含有扁率的化简,是基于扁率 f = ( a − b ) / a = 1 − b / a f = (a-b)/a = 1 - b/a f=(a−b)/a=1−b/a 计算得到的。
通过上面的处理,极坐标的 T ( θ , φ , H ) T(\theta, \varphi,H) T(θ,φ,H) 便转换为平面直角坐标 T ( x , y , z ) T(x,y,z) T(x,y,z) 。
3 从 ECEF 到经纬度
对上述计算过程而言,逆向运算可以立刻得到经度,却不能解析得到纬度。纬度需要进行迭代。
主要原因是:
∣ O O ′ ⃗ ∣ = r e 2 sin φ \left | \vec {OO'} \right | = re^2\sin \varphi OO′ =re2sinφ
的具体取值不知道导致的。
(1) 求取经度
由于
x / y = tan θ x/y=\tan \theta x/y=tanθ
故而
θ = tan − 1 ( x / y ) \theta=\tan^{-1} (x/y) θ=tan−1(x/y)
注意处理好象限问题,即可得到经度。
(2) 纬度、海拔计算
对于纬度,则比较复杂。求解三角方程
( r + H ) sin φ = z + ∣ O O ′ ⃗ ∣ (r + H) \sin \varphi = z + \left | \vec {OO'} \right | (r+H)sinφ=z+ OO′
由于 H 不知道,r 也不知道,加入第二条件(相切,H向量与r共线)后,得到的是二元四次三角方程,很难解析求取。
可以首先假设 ∣ O O ′ ⃗ ∣ = 0 \left | \vec {OO'} \right | =0 OO′ =0, 求取一个粗略的纬度,并得到 d,利用d反过来更新其他数值,进行迭代。这种迭代收敛的前提,是因为每次计算出的纬度一定小于真实的纬度,这是由三角关系决定的。
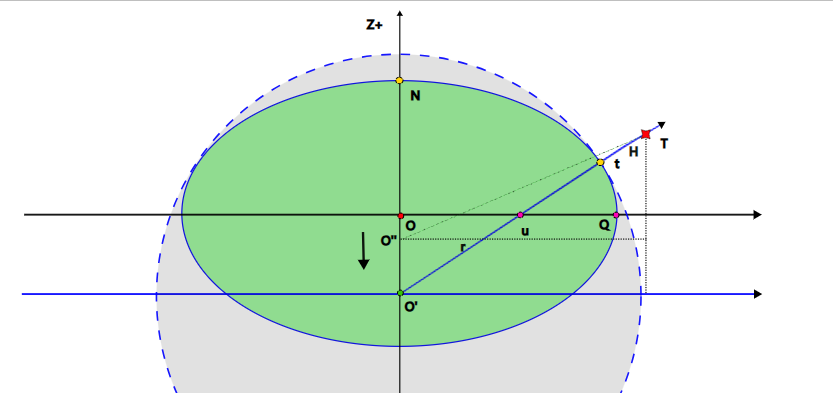 迭代的效果是不断地把原点向真实的原点移动,直到z达到一个很小的误差。迭代方法:
迭代的效果是不断地把原点向真实的原点移动,直到z达到一个很小的误差。迭代方法:
设起始偏移 d = ∣ O O ′ ⃗ ∣ = 0 d = \left | \vec {OO'} \right | =0 d= OO′ =0,迭代开始:
R ′ = r + H = x 2 + y 2 + ( z + d ) 2 R'=r+H = \sqrt{x^2+y^2+(z+d)^2} R′=r+H=x2+y2+(z+d)2
φ ′ = sin − 1 z + d R ′ \varphi' = \sin^{-1} {\frac {z+d}{R'}} φ′=sin−1R′z+d
r ′ = a 1 − e 2 sin 2 φ ′ r' = \frac{ a}{\sqrt{1-e^2 \sin^2\varphi' }} r′=1−e2sin2φ′a
d ′ = r ′ e 2 sin φ ′ d'= r'e^2\sin \varphi' d′=r′e2sinφ′
z ′ = R ′ s i n φ ′ − d ′ z'=R'sin \varphi'-d' z′=R′sinφ′−d′
d = d ′ d = d' d=d′
当
e
r
r
=
∣
z
−
z
′
∣
<
ε
err = \left | z-z' \right | < \varepsilon
err=∣z−z′∣<ε
时停止迭代。此时
φ = sin − 1 z + d x 2 + y 2 + ( z + d ) 2 \varphi = \sin^{-1} {\frac {z+d}{\sqrt{x^2+y^2+(z+d)^2}}} φ=sin−1x2+y2+(z+d)2z+d
H = R ′ − r ′ H= R'-r' H=R′−r′
4 代码与工程
代码与工程参考
https://gitcode.net/coloreaglestdio/geocalc/-/blob/master/geocalc.h
核心转换逻辑如下:
/*!
* GEOCalc 实现了基本的WGS-84坐标系的计算。
* by CEStdio
* 1997-2023
*
*/
#include <cassert>
#include <cmath>
namespace CES_GEOCALC {
inline const double a = 6378137;
inline const double pi = 3.14159265358979323846;
inline const double f = 1.0 / 298.257223563;
inline const double e = sqrt(f * (2 - f));
inline const double es = f * (2 - f);
inline const double deg2rad = pi / 180.0;
inline const double rad2deg = 180.0 / pi;
/*!
* \brief lla2ecef 经纬度坐标到ECEF,
* \param lla 纬经高(默认)/经纬高, 量纲是度(默认)/弧度、米
* \param ecef xyz,量纲是米
* \param rad 角度量纲开关,false 是度,true 是弧度
* \param latfirst 经纬度顺序,false 是经度\纬度\高度,true 是纬度\经度\高度
*/
inline void lla2ecef(const double lla[/*3*/],
double ecef[/*3*/],
const bool rad = false,
const bool latfirst = true)
{
const double lat = latfirst ? (rad ? (lla[0]) : (lla[0] * deg2rad))
: (rad ? (lla[1]) : (lla[1] * deg2rad));
const double lon = latfirst ? (rad ? (lla[1]) : (lla[1] * deg2rad))
: (rad ? (lla[0]) : (lla[0] * deg2rad));
const double H = lla[2];
const double r = a / sqrt(1 - es * sin(lat) * sin(lat));
const double d = r * es * sin(lat);
ecef[0] = (r + H) * cos(lat) * cos(lon);
ecef[1] = (r + H) * cos(lat) * sin(lon);
ecef[2] = (r + H) * sin(lat) - d;
}
/*!
* \brief ecef2lla ECEF到经纬度坐标
* \param ecef xyz,量纲是米
* \param lla 纬经高(默认)/经纬高, 量纲是度(默认)/弧度、米
* \param maxiter 最大迭代次数
* \param piter 迭代次数输出,可以为null
* \param eps Z误差门限
* \param rad 角度量纲开关,false 是度,true 是弧度
* \param latfirst 经纬度顺序,false 是经度\纬度\高度,true 是纬度\经度\高度
* \return 迭代收敛标志
*/
inline bool ecef2lla(const double ecef[/*3*/],
double lla[/*3*/],
const int maxiter = 32,
int * piter = nullptr,
const double eps = 1e-10,
const bool rad = false,
const bool latfirst = true)
{
const double x = ecef[0], y = ecef[1], z = ecef[2] < 0 ? -ecef[2] : ecef[2];
const int south = ecef[2] < 0 ? -1 : 1;
double d = 0;
double err = 0;
int iter = 0;
double Rp = 0, sinphi = 0, rp = 0, dp = 0, zp = 0;
do {
Rp = sqrt(x * x + y * y + (z + d) * (z + d));
sinphi = (z + d) / Rp;
rp = a / sqrt(1 - es * sinphi * sinphi);
dp = rp * es * sinphi;
zp = Rp * sinphi - dp;
d = dp;
assert(z >= zp);
err = z - zp; //z always > zp
++iter;
} while (err > eps && iter < maxiter);
const double lat = asin(sinphi) * south;
const double lon = atan2(y, x);
const double H = Rp - rp;
lla[latfirst?0:1] = lat * (rad?1:rad2deg);
lla[latfirst?1:0] = lon * (rad?1:rad2deg);
lla[2] = H;
if (piter)
*piter = iter;
return err <= eps;
}
}; // namespace CES_GEOCALC
对各种边界和迭代次数进行测试, 以确定迭代的收敛性:
using namespace CES_GEOCALC;
for (double lon = -180; lon <=180; lon+=60)
{
for (double lat = -90; lat <=90; lat += 15)
{
double LLA[] = {lat,lon,10000};
double ECEF[] = {0, 0, 0};
double LLA2[] = {0, 0, 0};
lla2ecef(LLA, ECEF);
int iter = 0;
ecef2lla(ECEF,LLA2,32,&iter);
printf("LAT=%12.7lf,LON=%12.7lf,dLAT=%10.7lf,dLON=%10.7lf,dALT=%5.3lf, iter = %d\n",
lat,lon,
LLA[0]-LLA2[0], LLA[1]-LLA2[1], LLA[2]-LLA2[2],iter);
}
}
输出:
LAT= -90.0000000,LON=-180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 2
LAT= -75.0000000,LON=-180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= -60.0000000,LON=-180.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= -45.0000000,LON=-180.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 7
LAT= -30.0000000,LON=-180.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= -15.0000000,LON=-180.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 0.0000000,LON=-180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 1
LAT= 15.0000000,LON=-180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 30.0000000,LON=-180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 45.0000000,LON=-180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 7
LAT= 60.0000000,LON=-180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= 75.0000000,LON=-180.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= 90.0000000,LON=-180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 2
LAT= -90.0000000,LON=-120.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 2
LAT= -75.0000000,LON=-120.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 6
LAT= -60.0000000,LON=-120.0000000,dLAT=-0.0000000,dLON=-0.0000000,dALT=0.000, iter = 6
LAT= -45.0000000,LON=-120.0000000,dLAT=-0.0000000,dLON=-0.0000000,dALT=0.000, iter = 7
LAT= -30.0000000,LON=-120.0000000,dLAT=-0.0000000,dLON=-0.0000000,dALT=0.000, iter = 8
LAT= -15.0000000,LON=-120.0000000,dLAT=-0.0000000,dLON=-0.0000000,dALT=0.000, iter = 8
LAT= 0.0000000,LON=-120.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 1
LAT= 15.0000000,LON=-120.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 8
LAT= 30.0000000,LON=-120.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 8
LAT= 45.0000000,LON=-120.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 7
LAT= 60.0000000,LON=-120.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 6
LAT= 75.0000000,LON=-120.0000000,dLAT=-0.0000000,dLON=-0.0000000,dALT=0.000, iter = 6
LAT= 90.0000000,LON=-120.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 2
LAT= -90.0000000,LON= -60.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 2
LAT= -75.0000000,LON= -60.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 6
LAT= -60.0000000,LON= -60.0000000,dLAT=-0.0000000,dLON=-0.0000000,dALT=0.000, iter = 6
LAT= -45.0000000,LON= -60.0000000,dLAT=-0.0000000,dLON=-0.0000000,dALT=0.000, iter = 7
LAT= -30.0000000,LON= -60.0000000,dLAT=-0.0000000,dLON=-0.0000000,dALT=0.000, iter = 8
LAT= -15.0000000,LON= -60.0000000,dLAT=-0.0000000,dLON=-0.0000000,dALT=0.000, iter = 8
LAT= 0.0000000,LON= -60.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 1
LAT= 15.0000000,LON= -60.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 8
LAT= 30.0000000,LON= -60.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 8
LAT= 45.0000000,LON= -60.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 7
LAT= 60.0000000,LON= -60.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 6
LAT= 75.0000000,LON= -60.0000000,dLAT=-0.0000000,dLON=-0.0000000,dALT=0.000, iter = 6
LAT= 90.0000000,LON= -60.0000000,dLAT= 0.0000000,dLON=-0.0000000,dALT=0.000, iter = 2
LAT= -90.0000000,LON= 0.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 2
LAT= -75.0000000,LON= 0.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= -60.0000000,LON= 0.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= -45.0000000,LON= 0.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 7
LAT= -30.0000000,LON= 0.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= -15.0000000,LON= 0.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 0.0000000,LON= 0.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 1
LAT= 15.0000000,LON= 0.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 30.0000000,LON= 0.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 45.0000000,LON= 0.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 7
LAT= 60.0000000,LON= 0.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= 75.0000000,LON= 0.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= 90.0000000,LON= 0.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 2
LAT= -90.0000000,LON= 60.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 2
LAT= -75.0000000,LON= 60.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= -60.0000000,LON= 60.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= -45.0000000,LON= 60.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 7
LAT= -30.0000000,LON= 60.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= -15.0000000,LON= 60.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 0.0000000,LON= 60.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 1
LAT= 15.0000000,LON= 60.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 30.0000000,LON= 60.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 45.0000000,LON= 60.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 7
LAT= 60.0000000,LON= 60.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= 75.0000000,LON= 60.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= 90.0000000,LON= 60.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 2
LAT= -90.0000000,LON= 120.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 2
LAT= -75.0000000,LON= 120.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= -60.0000000,LON= 120.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= -45.0000000,LON= 120.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 7
LAT= -30.0000000,LON= 120.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= -15.0000000,LON= 120.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 0.0000000,LON= 120.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 1
LAT= 15.0000000,LON= 120.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 30.0000000,LON= 120.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 45.0000000,LON= 120.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 7
LAT= 60.0000000,LON= 120.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= 75.0000000,LON= 120.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= 90.0000000,LON= 120.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 2
LAT= -90.0000000,LON= 180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 2
LAT= -75.0000000,LON= 180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= -60.0000000,LON= 180.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= -45.0000000,LON= 180.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 7
LAT= -30.0000000,LON= 180.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= -15.0000000,LON= 180.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 0.0000000,LON= 180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 1
LAT= 15.0000000,LON= 180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 30.0000000,LON= 180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 8
LAT= 45.0000000,LON= 180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 7
LAT= 60.0000000,LON= 180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= 75.0000000,LON= 180.0000000,dLAT=-0.0000000,dLON= 0.0000000,dALT=0.000, iter = 6
LAT= 90.0000000,LON= 180.0000000,dLAT= 0.0000000,dLON= 0.0000000,dALT=0.000, iter = 2