状态估计的概率解释:位姿x和路标y服从某种概率分布,目的是通过某些运动数据u(比如惯性测量传感器IMU输入)和观测数据z(比如拍摄到的照片像素点的值)来确定状态量x和y的分布。
一、关于卡尔曼滤波器和扩展卡尔曼滤波器的推导有博主写过,过程很详细。
(7条消息) SLAM14讲学习笔记(六)后端(最难一章:卡尔曼滤波器推导、理解以及扩展)_zkk9527的博客-CSDN博客_swm恒等式

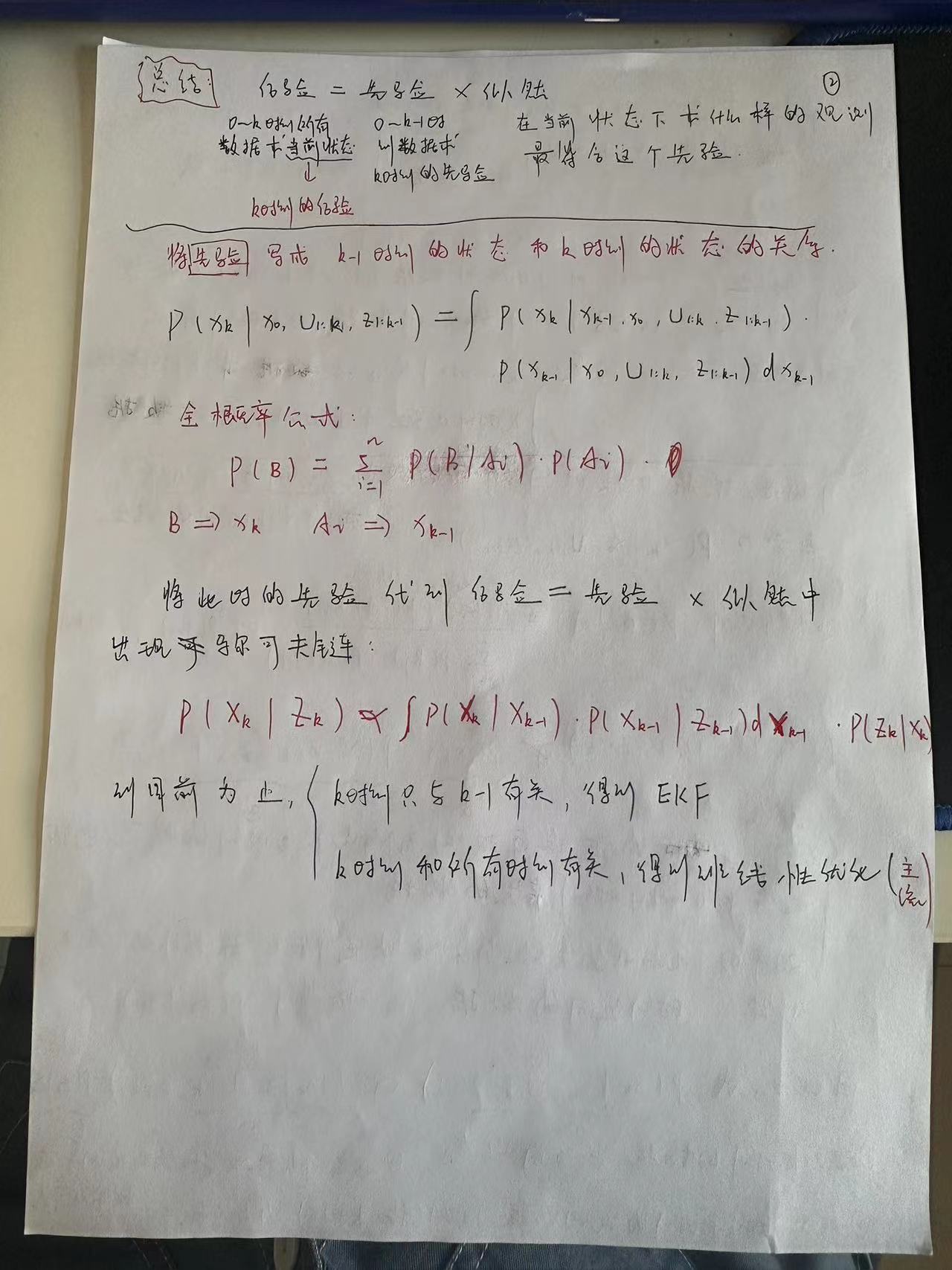




二、关于扩展卡尔曼滤波器的局限性
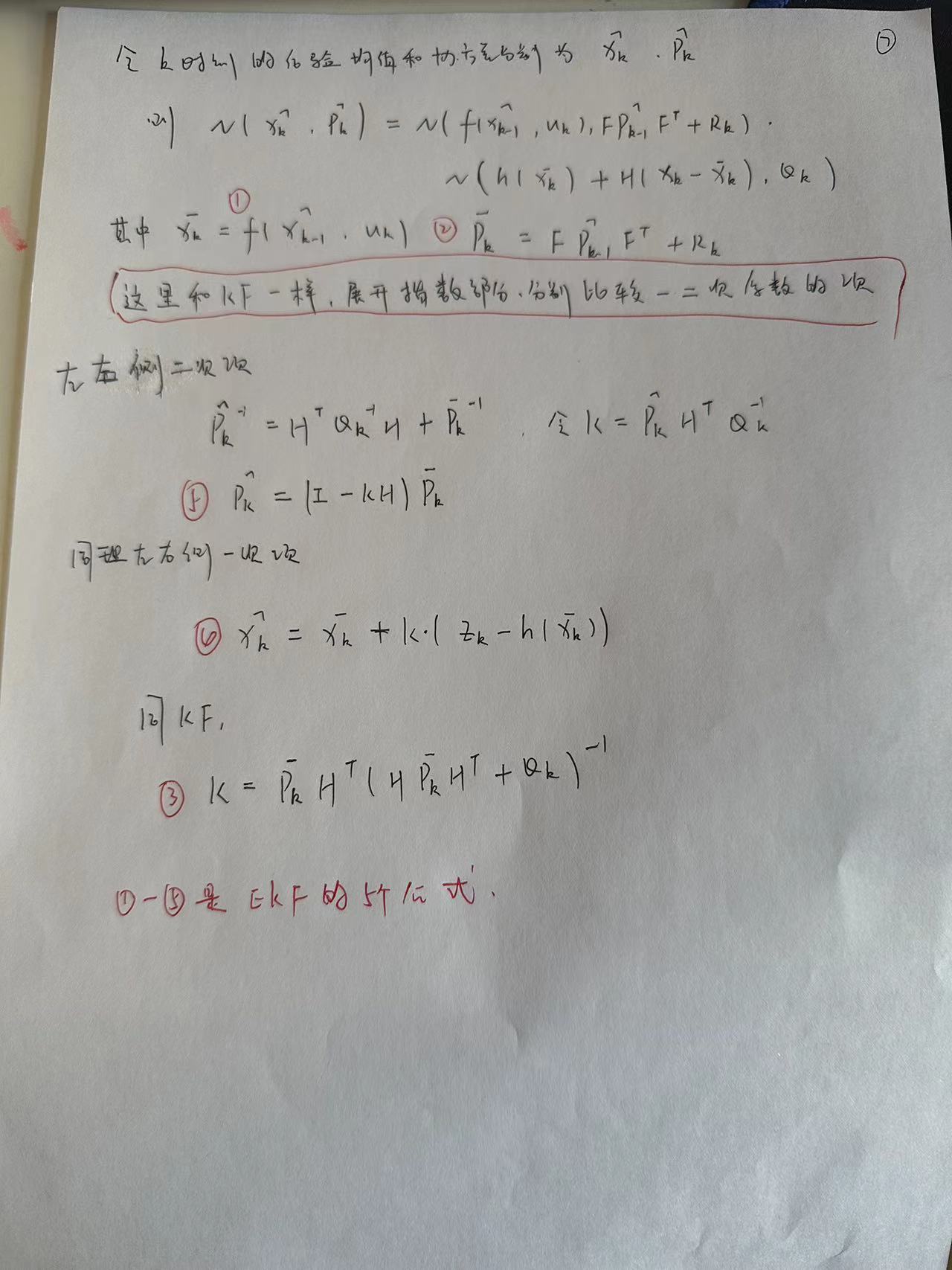
- 假设了马尔可夫性,认为k时刻状态只与k-1时刻有关;
- SLAM非线性较强,EKF只做了一次线性化,非线性误差较大
- 在推导中我们x的记号中实际包含了相机位姿和路标点,随着相机的运动,新增路标点越来越多,存储的状态量平方增长(因为存储协方差矩阵),因此不适用于大尺度场景。
- EKF没有异常检测机制,但是在SLAM中误匹配十分常见
因此,目前采用非线性优化是更好的选择。
三、非线性优化——BA优化
ch7中也用到过BA,这里和之前的区别在于,之前的BA中误差项都是针对于单个位姿和路标点的,但是在整体的BA目标函数上,必须把自变量定义成所有待优化的变量。也就是说,这章讲的是所有的误差合并到一起,做一个整体的矩阵进行优化。
这部分内容高博书讲的很详细,重点是H矩阵的稀疏性以及Schur消元求解
四、鲁棒核函数
BA中存在一个严重的问题:如果处于误匹配等原因,明明某个相机位姿处没有观测到路标点 pj ,但是误以为观测到了(表现在图中就是多加了一个本不应该存在的边),于是在BA过程中会产生一个误差极大的一项,于是为了减小这一项的误差,会使得其他正确的边全都受很大影响。
根本原因在于:当误差很大时,二范数增长太快,因此二范数容易受到某一个极大误差项的影响。
解决方法:采用鲁棒核函数,让阈值δ内使用二范数,阈值δ外使用其他增长慢的范数。








![[ vulhub漏洞复现篇 ] GhostScript 沙箱绕过(任意命令执行)漏洞CVE-2019-6116](https://img-blog.csdnimg.cn/67495553f1bf4447b4fcb1e570c16e5f.png)

![[技巧]还在使用RDP远程windows?OpenSSH远程win10操作系统!](https://img-blog.csdnimg.cn/df0bbf8213464b95b348cf4efdf402e3.png)