文章目录
- 1. grid_sample算子功能解析
- 1.1 理论介绍
- 1.2 代码分析
- 1.2.1 x,y取值范围[-1,1]
- 1.2.2 x,y取值范围超出[-1,1]
- 2. 使用grid_sample算子构建一个网络
- 3. 走PTQ进行模型转换与编译
实操以J5 OE1.1.60对应的docker为例
1. grid_sample算子功能解析
该段主要参考:https://blog.csdn.net/jameschen9051/article/details/124714759,不想看理论可直接跳至第2节
1.1 理论介绍
在图像处理领域,grid_sample 是一个常用的操作,通常用于对图像进行仿射变换或透视变换。它可以在给定输入图像和一个变换矩阵的情况下,对输入图像进行采样,生成一个新的输出图像。
pytorch中调用接口:
torch.nn.functional.grid_sample(input,grid,mode='bilinear',padding_mode='zeros',align_corners=None)
- input:输入特征图,可以是四维或者五维张量,本文主要以四维为例进行介绍,表示为 (N,C,Hin,Win) 。
- grid:采样网格,包含输出特征图的shape大小(Hout、Wout),每个 网格值 通过变换对应到输入特征图的采样点位,当对应四维input时,其张量形式为(N,Hout,Wout,2),其中最后一维大小必须为2,如果输入input为五维张量,那么最后一维大小必须为3。
为什么最后一维必须为2或者3?因为grid的最后一个维度实际上代表一个坐标(x,y)或者(x,y,z),对应到输入特征图的二维或三维特征图的坐标维度,x,y取值范围一般为[-1,1],该范围映射到输入特征图的全图,一通操作变换后对应于输出图像上的一个像素点。
- mode:采样模式,可以是 ‘bilinear’(双线性插值)、 ‘nearest’(最近邻插值)、‘bicubic’ 双三次插值。。
- padding_mode:填充模式,用于处理采样时超出输入图像边界的情况,可以是 ‘zeros’ 、 ‘border’、 ‘reflection’。
- align_corners:一个布尔值,用于指定特征图坐标与特征值对应方式,设定为TRUE时,特征值位于像素中心。
总的说来,grid_sample 算子会根据给定的网格(grid)在输入图像上进行采样,然后根据选择的插值方法在采样点周围的像素上进行插值,最终生成输出图像。
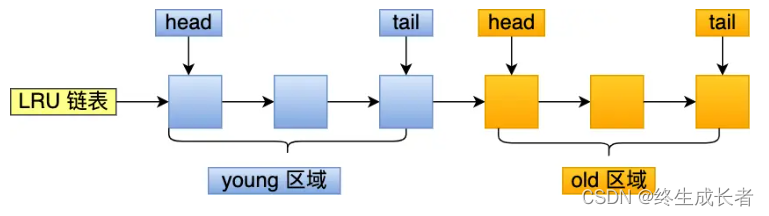
画一个在BEV方案中grid_sample原理图来帮助理解grid_sample怎么回事:

1.2 代码分析
对照代码进行下一步解读。
假设输入shape为(N,C,H_in,W_in),grid的shape设定为(N,H_out,W_out,2),使用双线性差值,填充模式为zeros,align_corners需要设置为True。
首先根据input和grid设定,输出特征图tensor的shape为(N,C,H_out,W_out),输出特征图上每一个cell上的值与grid最后一维(x,y)息息相关,那么如何计算输出tensor上每一个点的值?
首先,通过(x,y)找到输入特征图上的采样位置:由于x,y取值范围为[-1,1],为了便于计算,先将x,y取值范围调整为[0,1],方法是(x+1)/2,(y+1)/2。因此,将x,y映射为输入特征图的具体坐标位置:(w-1)(x+1)/2、(h-1)(y+1)/2。
将x,y映射到输入特征图实际坐标后,取该坐标附近四个角点特征值,通过四个特征值坐标与采样点坐标相对关系进行双线性插值,得到采样点的值。
注意:x,y映射后的坐标可能是输入特征图上任意位置。
基于上面的思路,可以进行一个简单的自定义实现。根据指定shape生成input和grid,之后取grid中的第一个位置中的x,y,根据x,y从input中通过双线性插值计算出output第一个位置的值。类比使用pytorch中的grid_sample算子生成output。
其它的看代码注释即可。
1.2.1 x,y取值范围[-1,1]
import torch
import numpy as np
def grid_sample(input, grid):
N, C, H_in, W_in = input.shape
N, H_out, W_out, _ = grid.shape
output = np.random.random((N,C,H_out,W_out))
for i in range(N):
for j in range(C):
for k in range(H_out):
for l in range(W_out):
param = [0.0, 0.0]
# 通过(w-1)*(x+1)/2、(h-1)*(y+1)/2将x,y映射为输入特征图的具体坐标位置。
param[0] = (W_in - 1) * (grid[i][k][l][0] + 1) / 2
param[1] = (H_in - 1) * (grid[i][k][l][1] + 1) / 2
x0 = int(param[0]) # int取整规则:将小数部分截断去掉。
x1 = x0 + 1
y0 = int(param[1])
y1 = y0 + 1
param[0] -= x0 # 此时param里装的是小数部分
param[1] -= y0
# 双线性插值
left_top = input[i][j][y0][x0] * (1 - param[0]) * (1 - param[1])
left_bottom = input[i][j][y1][x0] * (1 - param[0]) * param[1]
right_top = input[i][j][y0][x1] * param[0] * (1 - param[1])
right_bottom = input[i][j][y1][x1] * param[0] * param[1]
result = left_bottom + left_top + right_bottom + right_top
output[i][j][k][l] = result
return output
if __name__=='__main__':
N, C, H_in, W_in, H_out, W_out = 1, 1, 4, 4, 2, 2
input = np.random.random((N,C,H_in,W_in))
# np.random.random()范围是[0,1),想要[a,b)的数据,需要(b-a)*np.random.random() + a
grid = -1 + 2*np.random.random((N,H_out,W_out,2)) # 最后一维2,生成了坐标
out = grid_sample(input, grid)
print(f'自定义实现输出结果:\n{out}')
input = torch.from_numpy(input)
grid = torch.from_numpy(grid)
# 注意:这儿align_corners=True
output = torch.nn.functional.grid_sample(input,grid,mode='bilinear', padding_mode='zeros',align_corners=True)
print(f'grid_sample输出结果:\n{output}')
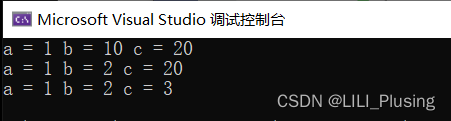
输出:

从输出结果上看,与pytorch基本一致。
注意:这里没有对超出[-1,1]范围的x,y值做处理,只能处理四维input,五维input的实现思路与这里基本一致:再加一层循环,内插算法改为3维。。
1.2.2 x,y取值范围超出[-1,1]
考虑到(x,y)取值范围可能越界,pytorch中的padding_mode设置就是对(x,y)落在输入特征图外边缘情况进行处理,一般设置’zero’,也就是对靠近输入特征图范围以外的采样点进行0填充,如果不进行处理显然会造成索引越界。要解决(x,y)越界问题,可以进行如下修改:
import torch
import numpy as np
def grid_sample(input, grid):
N, C, H_in, W_in = input.shape
N, H_out, W_out, _ = grid.shape
output = np.random.random((N,C,H_out,W_out))
for i in range(N):
for j in range(C):
for k in range(H_out):
for l in range(W_out):
param = [0.0, 0.0]
# 通过(w-1)*(x+1)/2、(h-1)*(y+1)/2将x,y映射为输入特征图的具体坐标位置。
param[0] = (W_in - 1) * (grid[i][k][l][0] + 1) / 2
param[1] = (H_in - 1) * (grid[i][k][l][1] + 1) / 2
x1 = int(param[0] + 1) # int取整规则:将小数部分截断去掉。
x0 = x1 - 1
y1 = int(param[1] + 1)
y0 = y1 - 1
param[0] = abs(param[0] - x0) # 此时param里装的是离x0,y0的距离
param[1] = abs(param[1] - y0)
# 填充
left_top_value, left_bottom_value, right_top_value, right_bottom_value = 0, 0, 0, 0
if 0 <= x0 < W_in and 0 <= y0 < H_in:
left_top_value = input[i][j][y0][x0]
if 0 <= x1 < W_in and 0 <= y0 < H_in:
right_top_value = input[i][j][y0][x1]
if 0 <= x0 < W_in and 0 <= y1 < H_in:
left_bottom_value = input[i][j][y1][x0]
if 0 <= x1 < W_in and 0 <= y1 < H_in:
right_bottom_value = input[i][j][y1][x1]
# 双线性插值
left_top = left_top_value * (1 - param[0]) * (1 - param[1])
left_bottom = left_bottom_value * (1 - param[0]) * param[1]
right_top = right_top_value * param[0] * (1 - param[1])
right_bottom = right_bottom_value * param[0] * param[1]
result = left_bottom + left_top + right_bottom + right_top
output[i][j][k][l] = result
return output
if __name__=='__main__':
N, C, H_in, W_in, H_out, W_out = 1, 1, 4, 4, 2, 2
input = np.random.random((N,C,H_in,W_in))
# np.random.random()范围是[0,1),想要[a,b)的数据,需要(b-a)*np.random.random() + a
grid = -1 + 2*np.random.random((N,H_out,W_out,2)) # 最后一维2,生成了坐标
grid[0][0][0] = [-1.2, 1.3] # 超出[-1,1]的范围
out = grid_sample(input, grid)
print(f'自定义实现输出结果:\n{out}')
input = torch.from_numpy(input)
grid = torch.from_numpy(grid)
# 注意:这儿align_corners=True
output = torch.nn.functional.grid_sample(input,grid,mode='bilinear', padding_mode='zeros',align_corners=True)
print(f'grid_sample输出结果:\n{output}')
输出:

2. 使用grid_sample算子构建一个网络
先看一下地平线提供的算子支持与约束列表:

据此,构建一个简单的网络,test.py代码如下:
import torch
import torch.nn as nn
import torch.nn.functional as F
from horizon_nn.torch import export_onnx
class GridSampleModel(nn.Module):
def __init__(self):
super(GridSampleModel, self).__init__()
self.unitconv = nn.Conv2d(24, 24, (1, 1), groups=3)
nn.init.constant_(self.unitconv.weight, 1)
nn.init.constant_(self.unitconv.bias, 0)
def forward(self, x1, x2):
x1 = self.unitconv(x1)
x = F.grid_sample(x1,
grid=x2,
mode='bilinear',
padding_mode='zeros',
align_corners=True)
x = self.unitconv(x)
return x
if __name__ == "__main__":
model = GridSampleModel()
model.eval()
input_names = ['x1', 'x2']
output_names = ['output']
x1 = torch.randn((1, 24, 600, 800))
x2 = torch.randn((1, 48, 64, 2))
export_onnx(model, (x1, x2), 'gridsample.onnx',
verbose=True, opset_version=11,
input_names=input_names, output_names=output_names)
print('convert to gridsampe onnx finish!!!')
运行test.py,生成onnx模型,可视化结构如下图:

3. 走PTQ进行模型转换与编译
对应config.yaml文件:
# 模型转化相关的参数
model_parameters:
onnx_model: './gridsample.onnx'
march: "bayes"
working_dir: 'model_output'
output_model_file_prefix: 'gridsample'
# 模型输入相关参数, 若输入多个节点, 则应使用';'进行分隔, 使用默认缺省设置则写None
input_parameters:
input_name: "x1;x2"
input_type_rt: 'featuremap;featuremap'
input_layout_rt: 'NCHW;NCHW'
input_type_train: 'featuremap;featuremap'
input_layout_train: 'NCHW;NCHW'
input_shape: '1x24x600x800;1x48x64x2'
norm_type: 'no_preprocess;no_preprocess'
# 模型量化相关参数
calibration_parameters:
calibration_type: 'skip'
# 编译器相关参数
compiler_parameters:
compile_mode: 'latency'
optimize_level: 'O3'
使用的是OE1.1.60对应的docker
hb_mapper makertbin --config config.yaml --model-type onnx

全一段,且都在BPU上