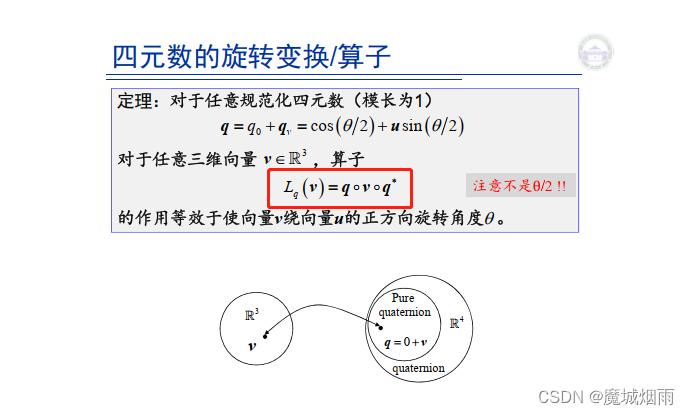
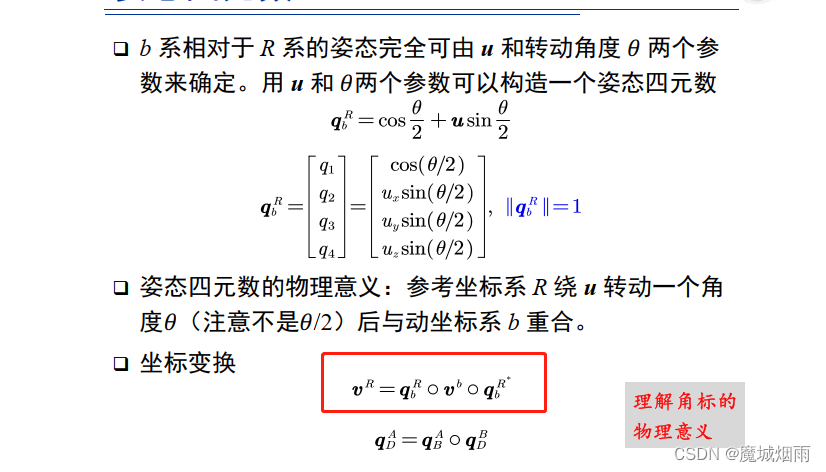
ardupilot 三维向量如何进行旋转
news2026/2/12 23:36:10

本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/859374.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

【C语言学习】函数的定义和调用
一、函数定义 要有返回类型、函数名和函数体 二、调用函数 函数名(函数值); ()起到表示函数调用的重要作用,即使没有参数也需要() 若有参数,则需要给出正确的数量和顺序…
【如何在Linux环境下进入Docker容器中的MySQL】
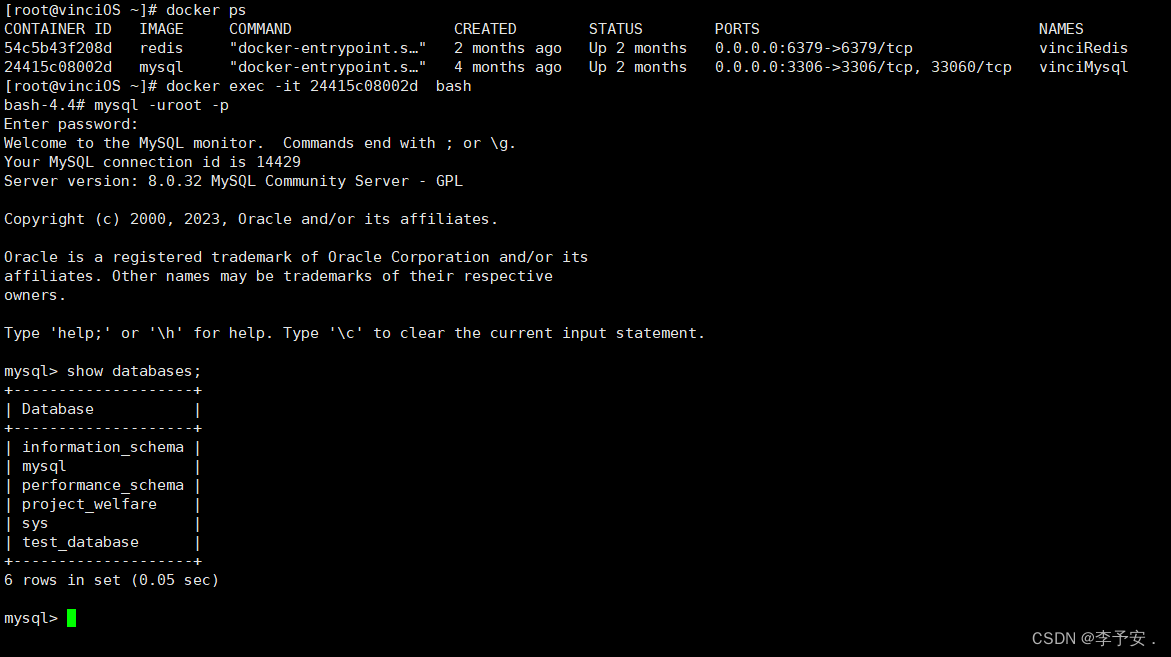
如何在Linux环境下进入Docker容器中的MySQL 查看所有容器
docker ps进入容器
docker exce -it {NAMES/CONTAINER ID} bash根据容器别名获取容器ID都可以进入到容器当中 3. 输入MySQL的账号和密码登录MySQL
mysql -uroot -p{password}
Linux下 时间戳的转化
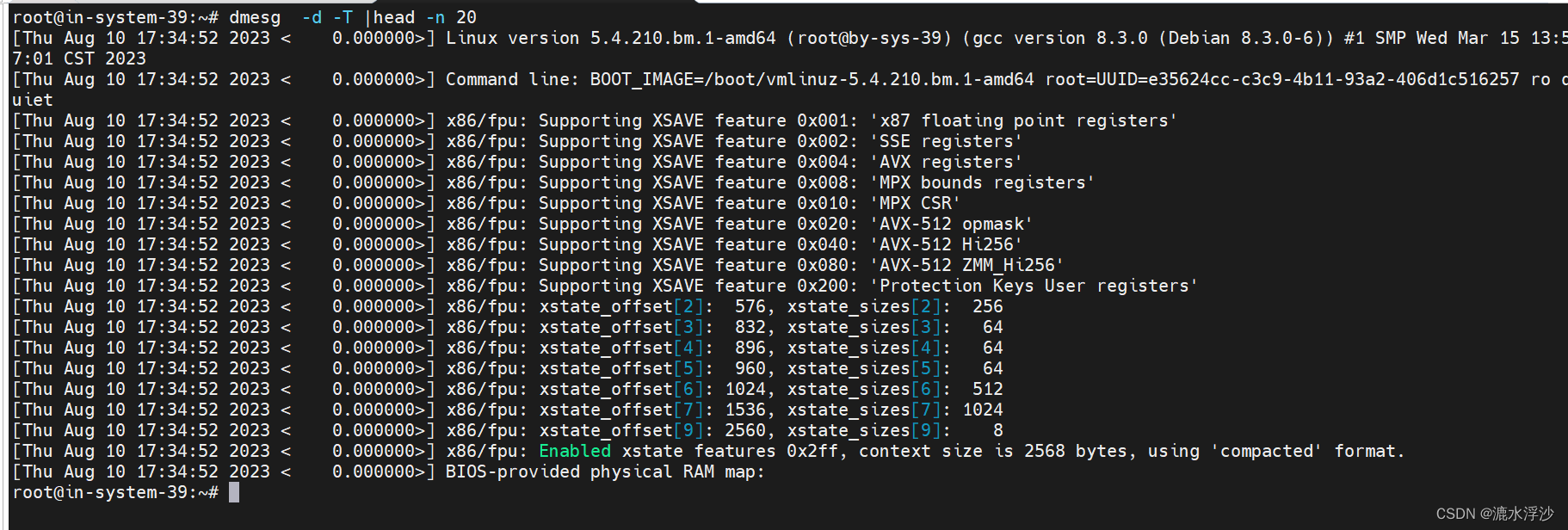
Linux下一般用date 记录当前时间,尤其是我们需要保存测试log的时候,或者设计一个跑多长时间的脚本都需要时间戳。下面看一下平时最常用的几种写法 1 date “%Y-%m-%d %H:%M” 显示具体时间 2 修改时间 date -s 3 date %s :当前时间的时间戳 显示具体时…
Maven介绍,部署在eclipse中
目录 一.Maven介绍
1,什么是maven?
2. 为什么maven会在企业中大量使用?
3.没有使用maven的前后区别?
4.maven在Java开发中的实际效果图
二.maven部署在eclipse中
1.下载maven在其官方网址下载(当然实际下载也要根据个人的…

速度提升13%?SK海力士新一代芯片组即将发布,搭载LPDDR5T 内存
据称SK海力士最新LPDDR5T内存已在联发科的下一代移动平台(可能是天玑9300)上成功验证。 SK海力士宣布,联发科即将于今年内发布最新一代旗舰移动芯片组,其中包括速度高达9.6Gbps的LPDDR5T内存。与前一代海力士LPDDR5X相比ÿ…

htmlCSS-----案例展示
目录
前言
作品效果
html代码
CSS代码
图片资源 前言 在学习html过程中我们要试着去写写一些案例,通过这些案例让我们更加熟悉代码以及丰富我们的经验,下面是我个人写的一个案例,代码和图片也给出了大家,你们可以参考参考。…
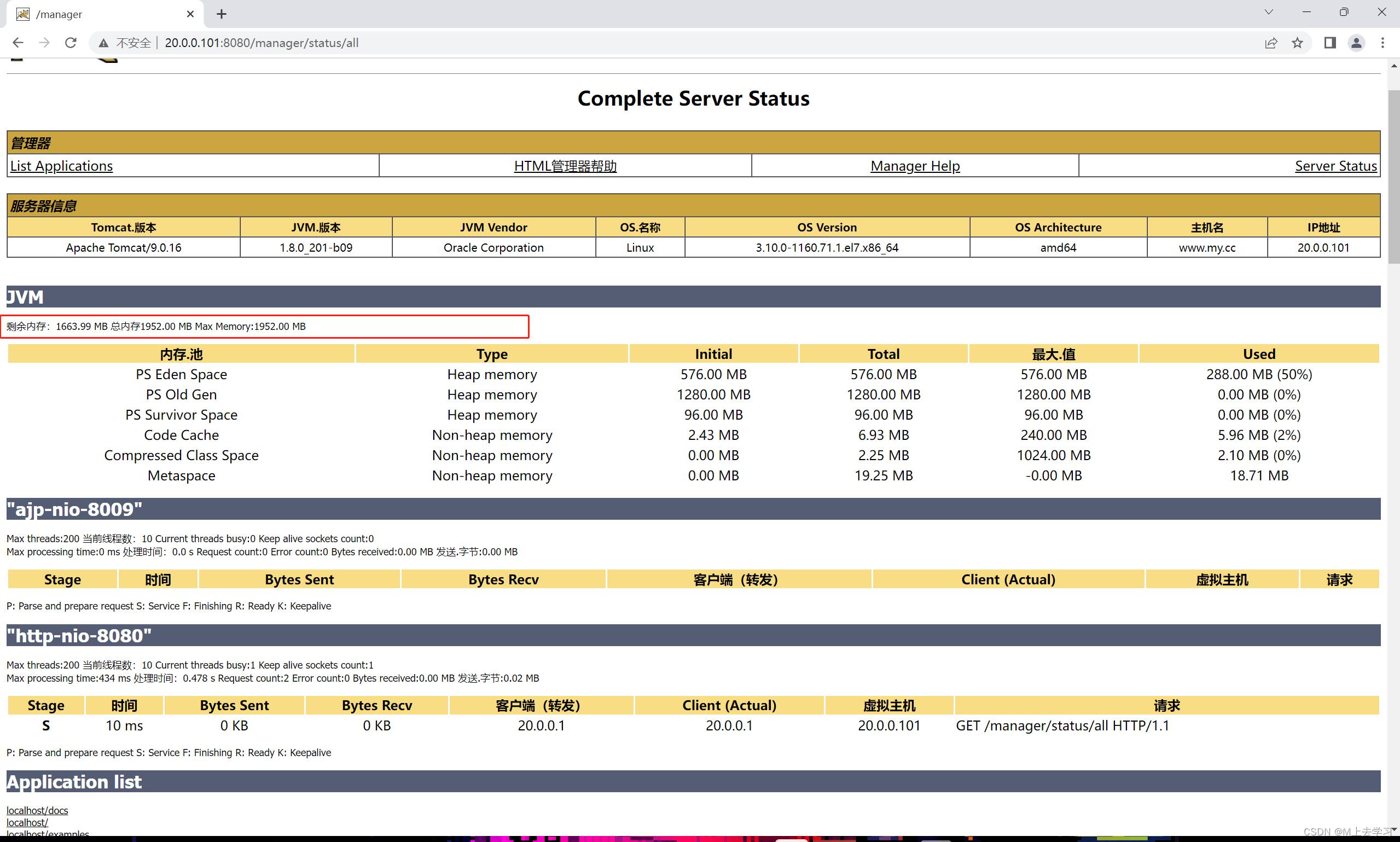
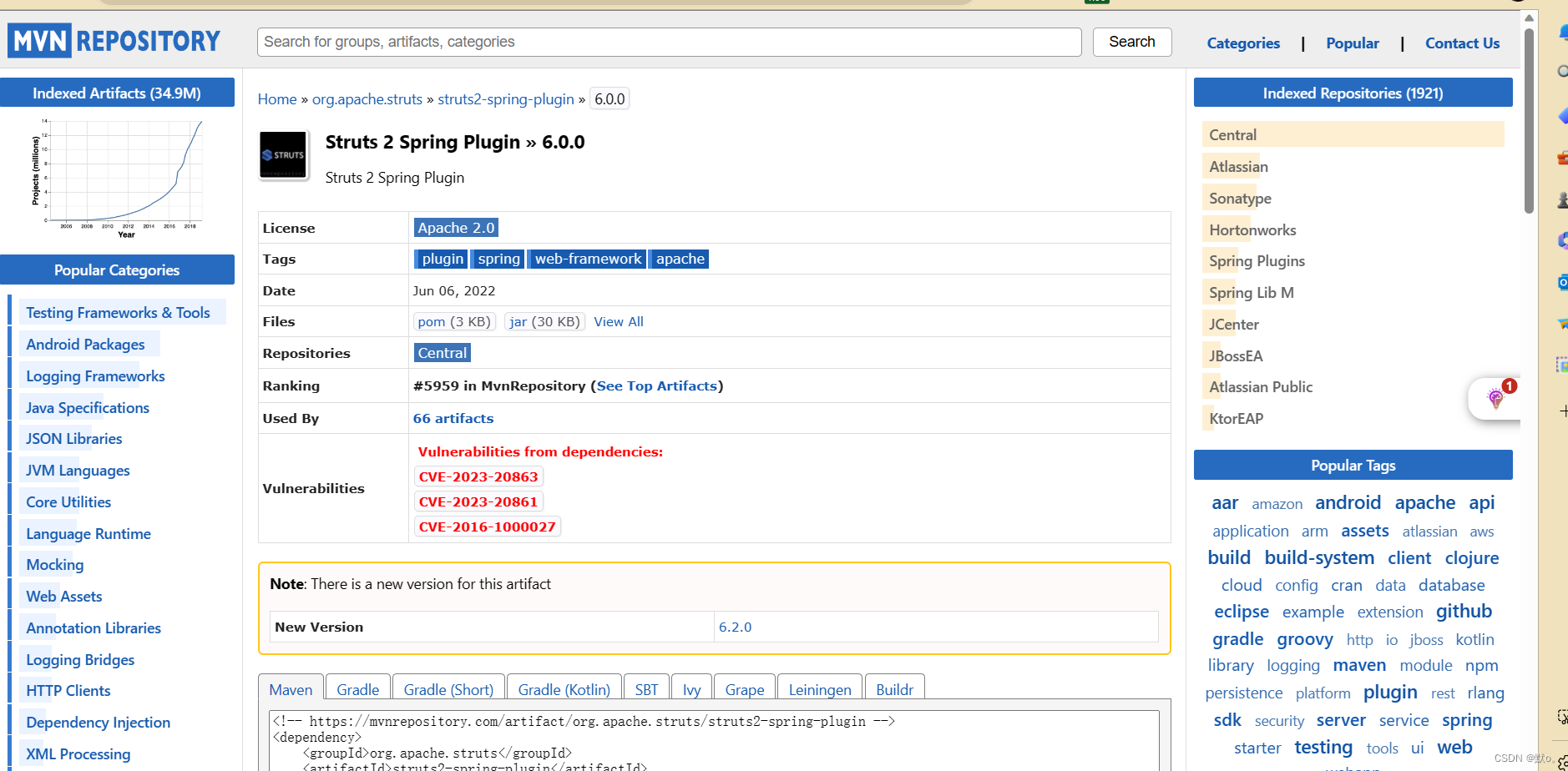
TOMCAT部署及优化(Tomcat配置文件参数优化,Java虚拟机(JVM)调优)
TOMCAT tomcat :是一个开放源代码的web应用服务器,基于java代码开发的。也可以理解为tomacat就是处理动态请求和基于java代码的页面开发。可以在html当中写入java代码,tomcat可以解析html页面当中的java,执行动态请求,…
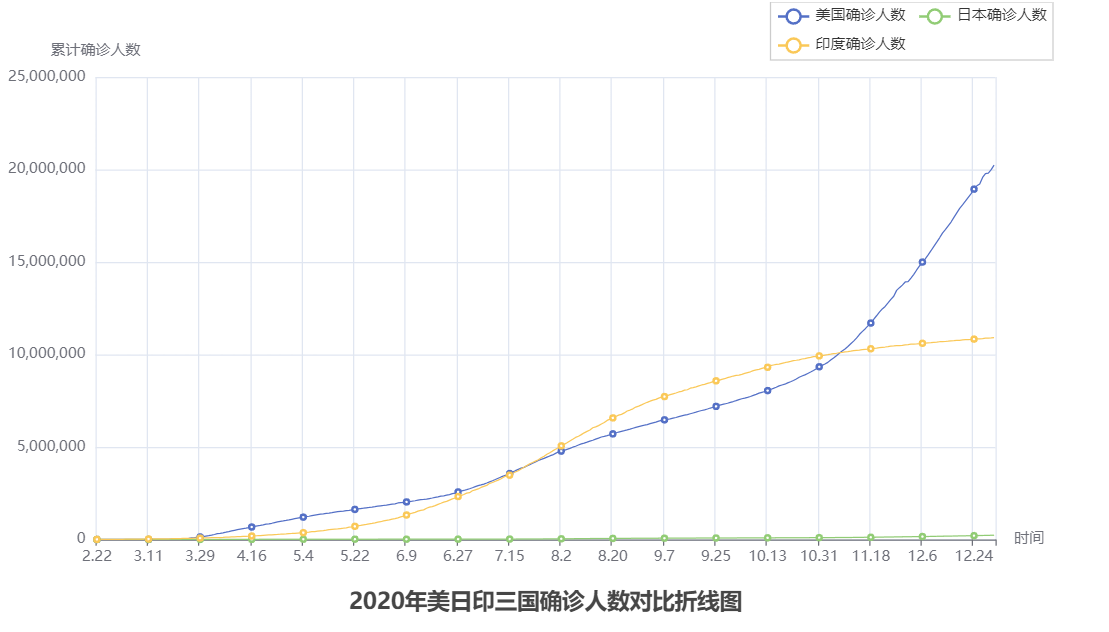
绽放趋势:Python折线图数据可视化艺术
文章目录 一 json数据格式1.1 json数据格式认识1.2 Python数据和Json数据的相互转换 二 pyecharts模块2.1 pyecharts概述2.2 pyecharts模块安装 三 pyecharts快速入门3.1 基础折线图3.2 pyecharts配置选项3.2.1 全局配置选项 3.4 折线图相关配置3.4.1 .add_yaxis相关配置选项3.…
最全网络安全(黑客)学习路线
在各大平台搜的网安学习路线都太粗略了。。。。看不下去了! 我把自己整理的系统学习路线,拿出来跟大家分享了!点击查看详细路线图 建议的学习顺序:
一、网络安全学习普法(心里有个数,要进去坐几年…

初阶C语言-操作符详解(下)
🌞 “等春风得意,等时间嘉许!” 接下来,我们把操作符没学完的继续学完! 操作符详解 6.2sizeof和数组 7.关系操作符8.逻辑操作符9.条件操作符10.逗号表达式11.下标引用、函数调用和结构成员12.表达式求值12.1隐式类型转…
设计模式(2)工厂方法模式
一、
1、介绍:定义一个用于创建对象的接口,让子类决定实例化哪一个类。工厂方法使一个类的实例化延迟到其子类。简单工厂模式的最大优点在于工厂类中包含了必要的逻辑判断,根据客户端的选择条件动态实例化相关的类,对于客户端来说…

cesium学习记录06-视图、场景与相机
一、视图(Viewer)
viewer是cesium的核心类,是一切的开端。通过new Cesium.Viewer(container, options)来创建一个Viewer对象,而通过这个 Viewer对象,可以添加图层、实体、相机控制等,以及设置一些全局属性…

Whisper.cpp 编译使用
Whisper.cpp 编译使用
whisper.cpp 是牛人 ggerganov 对 openai 的 whisper 语音识别模型用 C 重新实现的项目,开源在 github 上,具有轻量、性能高,实用性强等特点。这篇文章主要记录在 windows 平台,如何使用该模型在本地端进行…

自学网络安全(黑客)全网详细路线
前言
web渗透是网络安全大行业里入门板块,就像十年前的软件,前景非常被看好,薪资也很诱人。与软件测试和前端开发只需掌握一定的编程能力不同的是,渗透需要掌握的知识内容较多,花费的时间较长,渗透测试掌握…
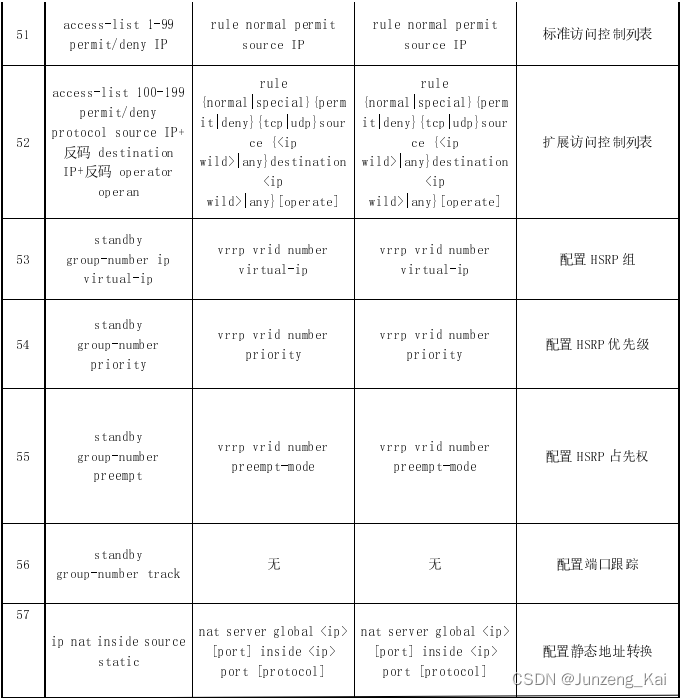
网络:CISCO、Huawei、H3C命令对照
思科、华为、锐捷命令对照表 编号思科华为锐捷命令解释1 2writesavesave保存3456 如果你所处的视图为非系统视图,需要查看配置的时候,需要在该配置命令前加do。 在特定的视图之下,有对应的特定命令。例如,在接口视图下的ip addre…
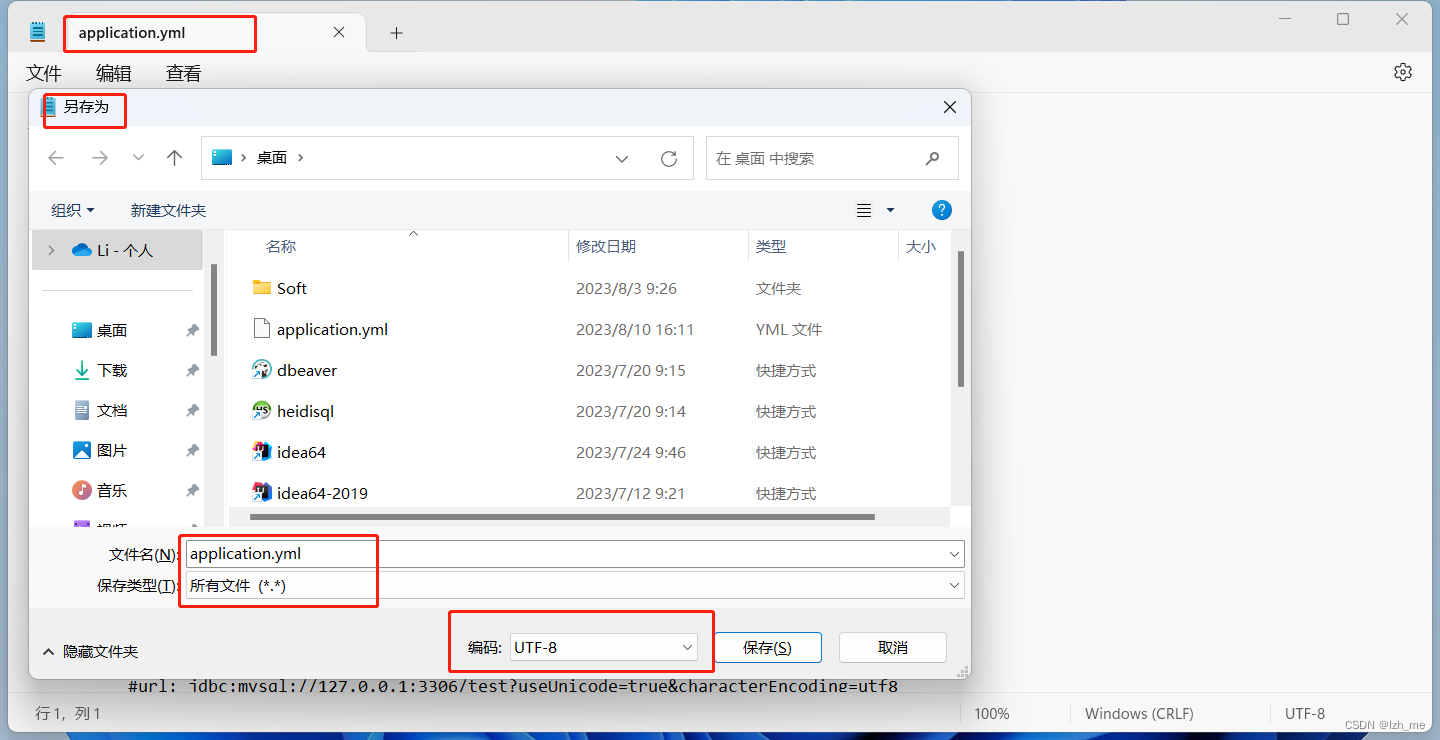
YAMLException: java.nio.charset.MalformedInputException: Input length = 1
springboot项目启动的时候提示这个错误:YAMLException: java.nio.charset.MalformedInputException: Input length 1
根据异常信息提示,是YAML文件有问题。
原因是yml配置文件的编码有问题。
需要修改项目的编码格式,一般统一为UTF-8。 或…
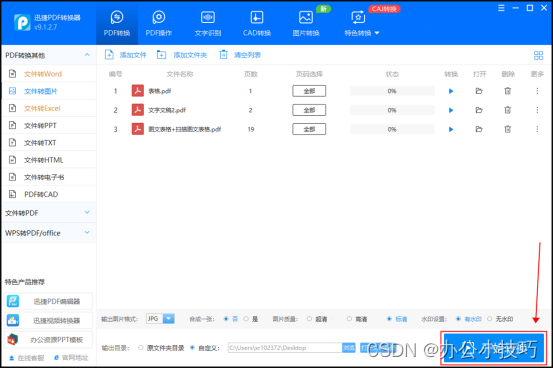
pdf怎么转换成jpg图片?这几个转换方法了解一下
pdf怎么转换成jpg图片?转换PDF文件为JPG图片格式在现代工作中是非常常见的需求,比如将PDF文件中的图表、表格或者图片转换为JPG格式后使用在PPT演示、网页设计等场景中。 【迅捷PDF转换器】是一款非常实用的工具,可以将PDF文件转换成多种不同…

Java 中如何优雅的实现对外接口,需要注意哪些事项?
博主之前做过恒丰银行代收付系统(相当于支付接口),包括现在的oltpapi交易接口和虚拟业务的对外提供数据接口。总之,当你做了很多项目写了很多代码的时候,就需要回过头来,多总结总结,这样你会看到…