目录
1. 排序的概念:
2.插入排序基本思想
3.直接插入排序
4.希尔排序
1. 排序的概念:
排序:所谓排序,就是使一串记录,按照其中的某个或某些关键字的大小,递增或递减的排列起来的操作。
稳定性:假定在待排序的记录序列中,存在多个具有相同的关键字的记录,若经过排序,这些记录的相对次序保持不变,即在原序列中,r[i]=r[j],且r[i]在r[j]之前,而在排序后的序列中,r[i]仍在r[j]之前,则称这种排序算法是稳定的;否则称为不稳定。
内部排序:数据元素全部放在内存中的排序。
外部排序:数据元素太多不能同时放在内存中,根据排序过程的要求不能在内外存之间移动数据的排序。
2.插入排序基本思想
直接插入排序是一种简单的插入排序法,其基本思想是:
把待排序的记录按其关键码值的大小逐个插入到一个已经排好序的有序序列中,直到所有的记录插入完为止,得到一个新的有序序列。
实际中我们玩扑克牌时,就用了插入排序的思想
3.直接插入排序
直接插入排序(InsertSort),当插入第i(i>=1)个元素时,前面的array[0],array[1]...aray[i-1]已经排好序,此时用array[i]的排序码与array[i-1],array[i-2.]..的排序码顺序进行比较,找到插入位置,即将array[i]插入,原来位置上的元素顺序后移。
直接插入排序图解:
代码实现思路:
假设在数组arr中,[0,end]这段区间是有序的,我们要将 end+1 位置处的元素插入,就需要将arr[end+1]与前面元素从后往前依次作比较,如果要排成升序,前面元素比arr[end+1]大的就往后移动,大或者等于就放在这个元素后面。数组一共有n个元素,要排n-1次,因为第一个元素不用排,从第二个元素开始。
代码:
//直接插入排序 升序
void InsertSort(int* a, int n)
{
for (int i = 0; i < n - 1; i++)
{
int end = i;
int tmp = a[end + 1];
while (end >= 0)
{
if (a[end] > tmp)
{
a[end + 1] = a[end];
end--;
}
else
{
break;
}
}
a[end + 1] = tmp;
}
}直接插入排序的特性总结:
- 元素集合越接近有序,直接插入排序算法的时间效率越高
- 时间复杂度:O(N^2)
- 空间复杂度:O(1),它是一种稳定的排序算法
- 稳定性:稳定
4.希尔排序
希尔排序法(ShellSort)又称缩小增量法。希尔排序法的基本思想是:先选定一个整数gap,把待排序文件中所有记录分成gap个组,所有距离为gap的记录分在同一组内,并对每一组内的记录进行排序。然后,取,重复上述分组和排序的工作。当到达gap==1时,所有记录已经在组内排好序。
- 希尔排序是对直接插入排序的优化,因为直接插入排序处理接近有序的元素集合时,效率会很高,接近O(N)。
- 当gap >1时都是预排序,目的是让数组元素更接近于有序。当gap == 1时,就和直接插入排序相同了,数组已经接近有序的了,这样就会很快。这样整体而言,可以达到优化的效果。我们实现后可以进行性能测试的对比。
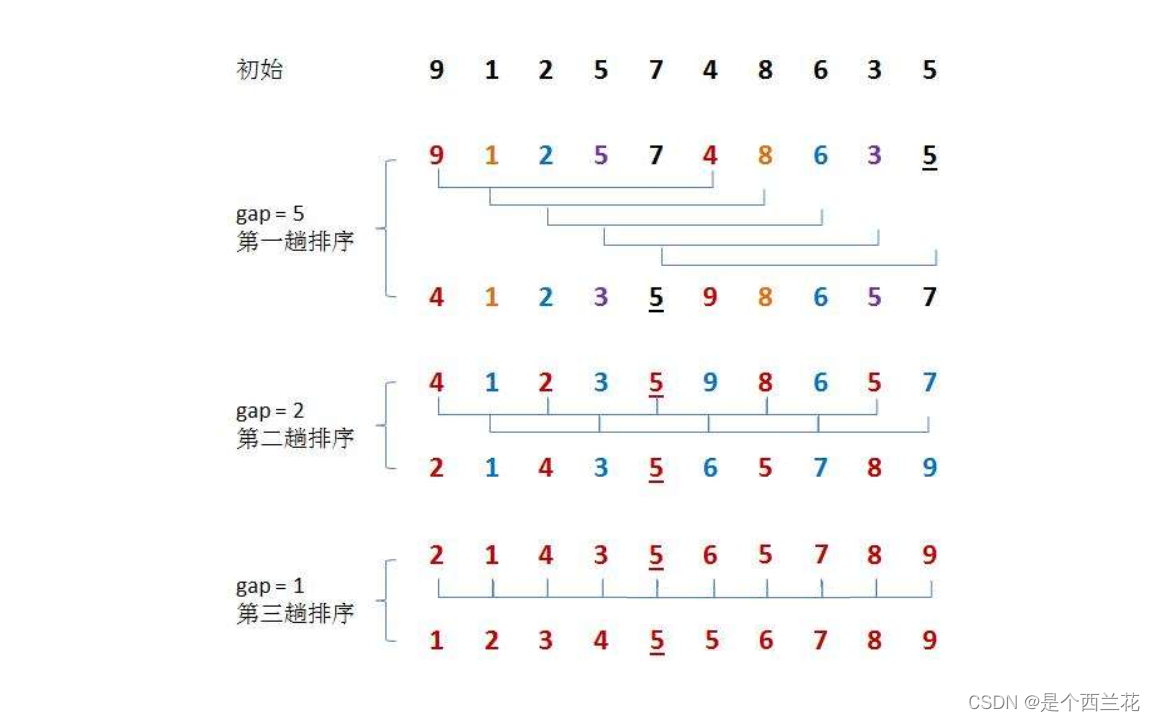
代码实现思路:
我们先要实现预排序,使数组元素集合接近有序。我们先假设gap=3。实现预排序有两种方式,一种是分组排序,排好一组再排下一组,另外一种是多组并排。这两种方法内部还是直接插入排序。大家可以和上面直接插入排序的代码对比一下。
分组排序代码:
//预排序 一组一组预排,
void BeforeSort1(int* arr, int n)
{
//假设gap = 3,分为3组,每组n/3个元素
int gap = 3;
for (int j = 0; j < gap; j++)
{
//每组内部进行排序
for (int i = j; i < n - gap; i += gap)
{
int end = i;
int tmp = arr[i + gap];
while (end >= 0)
{
if (tmp < arr[end])
{
arr[end + gap] = arr[end];
end -= gap;
}
else
{
break;
}
}
arr[end + gap] = tmp;
}
}
}多组并排代码:可以对比一下上面代码。
//预排序 多组并排
void BeforeSort2(int* arr, int n)
{
//假设gap = 3,分为3组,每组n/3个元素
int gap = 3;
for (int i = 0; i < n - gap; i++)
{
int end = i;
int tmp = arr[i + gap];
while (end >= 0)
{
if (tmp < arr[end])
{
arr[end + gap] = arr[end];
end -= gap;
}
else
{
break;
}
}
arr[end + gap] = tmp;
}
}其实:预处理不是简单的只处理一次,而是处理多次,让数据更加接近有序。最开始gap最大,之后gap每次逐渐减小,直至gap==1。
- gap越大,大的数可以更快的到后面,小的数可以更快的到前面,数据越不接近有序
- gap越小,大的小的数据挪动越慢,但是他越接近有序
- gap == 1,就是直接插入排序
我们这里让gap=n 每次预排让 gap = gap/3+1,确保最后可以得到1。
希尔排序代码实现:对于gap的取法我们下面会讲到。
// 希尔排序 升序
void ShellSort(int* a, int n)
{
int gap = n;
while (gap > 1)
{
gap = gap / 3 + 1;
for (int i = 0; i < n - gap; i++)
{
int end = i;
int tmp = a[end + gap];
while (end >= 0)
{
if (a[end] > tmp)
{
a[end + gap] = a[end];
end -= gap;
}
else
{
break;
}
}
a[end + gap] = tmp;
}
}
}关系希尔排序的时间复杂度以及gap的取法问题:
资料中是这样讲的:
《数据结构(C语言版)》--- 严蔚敏 《数据结构-用面相对象方法与C++描述》--- 殷人昆
《数据结构-用面相对象方法与C++描述》--- 殷人昆
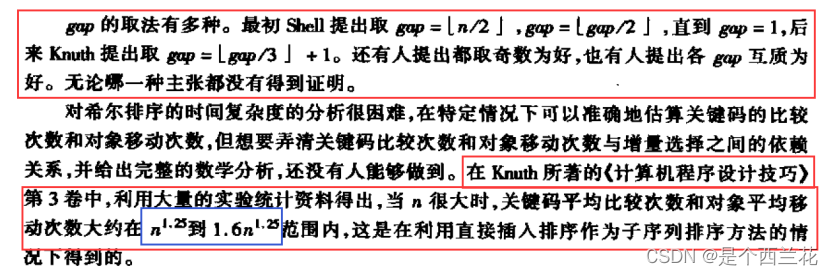
因为我们这里使用的gap是按照Knuth提出的方式取值的,而且Knuth进行了大量的试验统计,我们暂时时间复杂度就按照:O(N^1.25)到O(1.6 * N^1.25)来算。
稳定性:不稳定。
本篇结束!






![[Linux]进程间通信(上篇)——匿名管道(管道原理,实现示例,端口情况探究!!)](https://img-blog.csdnimg.cn/7fe107c43631494d8f4ec94a400cac90.png)