目录
开放地址法(Open Addressing)
线性探测(Linear Probing)
散列表查找性能分析
平方探测(Quadratic Probing)
定理
平方探测法的查找与插入
双散列探测法(Double Hashing)
再散列(Rehashing)
分离链接法(Separate Chaining)
平均查找次数
分离链接法的散列表实现
常用处理冲突的思路:
- 换个位置:开放定址法
- 同一位置的冲突对象组织在一起:链地址法
开放地址法(Open Addressing)
一旦产生了冲突(该地址已有其它元素),就按某种规则去寻找另一空地址。
若发生了第次冲突,试探的下一个地址将增加
,基本公式是:
的不同决定了不同的解决冲突方案:线性探测、平方探测、双散列。
- 线性探测:
- 平方探测:
- 双散列:
线性探测(Linear Probing)
线性探测法:以增量序列1,2,......,(TableSize-1)循环试探下一个存储地址。
通俗地来讲,就是当发生冲突时,将关键词+1;检测地址是否为空,如果不为空,就继续+1;如果为空,则表明不冲突了。
【例】设关键词序列为{47,7,29,11,9,84,54,20,30},散列表表长TableSize = 13(装填因子
);散列函数为:
.
用线性探测法处理冲突,列出依次插入后的散列表,并估算查找性能。
为了方便演示,我们先在不考虑冲突的情况下,把所有关键词的散列地址算出来:
| 关键词(key) | 47 | 7 | 29 | 11 | 9 | 84 | 54 | 20 | 30 |
|---|---|---|---|---|---|---|---|---|---|
| 散列地址h(key) | 3 | 7 | 7 | 0 | 9 | 7 | 10 | 9 | 8 |
发现很多地方是冲突的,这次用线性探测法来试着解决冲突。
| 操作/地址 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 说明 |
| 插入47 | 47 | 无冲突 | ||||||||||||
| 插入7 | 47 | 7 | 无冲突 | |||||||||||
| 插入29 | 47 | 7 | 29 | |||||||||||
| 插入11 | 11 | 47 | 7 | 29 | 无冲突 | |||||||||
| 插入9 | 11 | 47 | 7 | 29 | 9 | 无冲突 | ||||||||
| 插入84 | 11 | 47 | 7 | 29 | 9 | 84 | ||||||||
| 插入54 | 11 | 47 | 7 | 29 | 9 | 84 | 54 | |||||||
| 插入20 | 11 | 47 | 7 | 29 | 9 | 84 | 54 | 20 | ||||||
| 插入30 | 11 | 30 | 47 | 7 | 29 | 9 | 84 | 54 | 20 |
最终我们整理得到:
| H(key) | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| key | 11 | 30 | 47 | 7 | 29 | 9 | 84 | 54 | 20 | ||||
| 冲突次数 | 0 | 6 | 0 | 0 | 1 | 0 | 3 | 1 | 3 |
散列表查找性能分析
- 成功平均查找长度(ASLs)
- 不成功平均查找长度(ASLu)
ASLs:查找表中关键词的平均查找比较次数(等于其冲突次数加1)
即将所有元素的查找次数加起来,最后除以元素的个数
ASLu:不在散列表中的关键词的平均查找次数(不成功)
因为取余数的计算方式,所以所有不在散列表的关键词至多有p-1中情况(表不为空),例如例题中的散列函数,假设其表只有一个元素,那么其不在表中的情况就会有10种,我们一样考虑其需要比较几次。
余数为0的情况,表中位置[0]和[1]都不为空,所以需要比较3次;
余数为1的情况,表中位置[1]不为空,所以需要比较2次;
余数为2的情况,表中位置[2]为空,所以只需要比较1次;
余数为3的情况,表中位置[3]不为空,所以需要比较2次;
......
以此类推。
平方探测(Quadratic Probing)
平方探测法:以增量序列且
循环试探下一个存储地址。
【例】设关键词序列为{47,7,29,11,9,84,54,20,30},散列表表长TableSize = 11,散列函数为:
.用平方探测法处理冲突,列出依次插入后的散列表,并估算ASLs。
| 关键词(key) | 47 | 7 | 29 | 11 | 9 | 84 | 54 | 20 | 30 |
|---|---|---|---|---|---|---|---|---|---|
| 散列地址h(key) | 3 | 7 | 7 | 0 | 9 | 7 | 10 | 9 | 8 |
| 操作/地址 | 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 说明 |
| 插入47 | 47 | 无冲突 | ||||||||||
| 插入7 | 47 | 7 | 无冲突 | |||||||||
| 插入29 | 47 | 7 | 29 | |||||||||
| 插入11 | 11 | 47 | 7 | 29 | 无冲突 | |||||||
| 插入9 | 11 | 47 | 7 | 29 | 9 | 无冲突 | ||||||
| 插入84 | 11 | 47 | 84 | 7 | 29 | 9 | ||||||
| 插入54 | 11 | 47 | 84 | 7 | 29 | 9 | 54 | 无冲突 | ||||
| 插入20 | 11 | 20 | 47 | 84 | 7 | 29 | 9 | 54 | ||||
| 插入30 | 11 | 30 | 20 | 47 | 84 | 7 | 29 | 9 | 54 |
注意:用平方探测法,并不是有空间就一定能检测到的。
定理
如果散列表长度TableSize是某个4k+3(k是正整数)形式的素数时,平方探测法就可以探查到整个散列表空间。
平方探测法的查找与插入
#define MAXTABLESIZE 100000 /* 允许开辟的最大散列表长度 */
typedef int ElementType; /* 关键词类型用整型 */
typedef int Index; /* 散列地址类型 */
typedef Index Position; /* 数据所在位置与散列地址是同一类型 */
/* 散列单元状态类型,分别对应:有合法元素、空单元、有已删除元素 */
typedef enum { Legitimate, Empty, Deleted } EntryType;
typedef struct HashEntry Cell; /* 散列表单元类型 */
struct HashEntry{
ElementType Data; /* 存放元素 */
EntryType Info; /* 单元状态 */
};
typedef struct TblNode *HashTable; /* 散列表类型 */
struct TblNode { /* 散列表结点定义 */
int TableSize; /* 表的最大长度 */
Cell *Cells; /* 存放散列单元数据的数组 */
};
int NextPrime( int N )
{ /* 返回大于N且不超过MAXTABLESIZE的最小素数 */
int i, p = (N%2)? N+2 : N+1; /*从大于N的下一个奇数开始 */
while( p <= MAXTABLESIZE ) {
for( i=(int)sqrt(p); i>2; i-- )
if ( !(p%i) ) break; /* p不是素数 */
if ( i==2 ) break; /* for正常结束,说明p是素数 */
else p += 2; /* 否则试探下一个奇数 */
}
return p;
}
HashTable CreateTable( int TableSize )
{
HashTable H;
int i;
H = (HashTable)malloc(sizeof(struct TblNode));
/* 保证散列表最大长度是素数 */
H->TableSize = NextPrime(TableSize);
/* 声明单元数组 */
H->Cells = (Cell *)malloc(H->TableSize*sizeof(Cell));
/* 初始化单元状态为“空单元” */
for( i=0; i<H->TableSize; i++ )
H->Cells[i].Info = Empty;
return H;
}
Position Find( HashTable H, ElementType Key )
{
Position CurrentPos, NewPos;
int CNum = 0; /* 记录冲突次数 */
NewPos = CurrentPos = Hash( Key, H->TableSize ); /* 初始散列位置 */
/* 当该位置的单元非空,并且不是要找的元素时,发生冲突 */
while( H->Cells[NewPos].Info!=Empty && H->Cells[NewPos].Data!=Key ) {
/* 字符串类型的关键词需要 strcmp 函数!! */
/* 统计1次冲突,并判断奇偶次 */
if( ++CNum%2 ){ /* 奇数次冲突 */
NewPos = CurrentPos + (CNum+1)*(CNum+1)/4; /* 增量为+[(CNum+1)/2]^2 */
if ( NewPos >= H->TableSize )
NewPos = NewPos % H->TableSize; /* 调整为合法地址 */
}
else { /* 偶数次冲突 */
NewPos = CurrentPos - CNum*CNum/4; /* 增量为-(CNum/2)^2 */
while( NewPos < 0 )
NewPos += H->TableSize; /* 调整为合法地址 */
}
}
return NewPos; /* 此时NewPos或者是Key的位置,或者是一个空单元的位置(表示找不到)*/
}
bool Insert( HashTable H, ElementType Key )
{
Position Pos = Find( H, Key ); /* 先检查Key是否已经存在 */
if( H->Cells[Pos].Info != Legitimate ) { /* 如果这个单元没有被占,说明Key可以插入在此 */
H->Cells[Pos].Info = Legitimate;
H->Cells[Pos].Data = Key;
/*字符串类型的关键词需要 strcpy 函数!! */
return true;
}
else {
printf("键值已存在");
return false;
}
}
/*
源代码来自:https://www.icourse163.org/learn/ZJU-93001?tid=1469696455#/learn/content?type=detail&id=1252518398&cid=1282086737
*/在开放地址散列表中,删除操作要很小心。通常只能“懒惰删除”,即需要增加一个“删除标记(Deleted)”,而并不是真正删除它。以便查找时不会“断链”。其空间可以在下次插入时重用。
双散列探测法(Double Hashing)
双散列探测法:,
是另外一个散列函数,
探测序列成:
对任意的key,!!
探测序列还应该保证所有的散列存储单元都应该能够被探测到。选择以下形式有良好的效果:
其中,p < TableSize,p、TableSize都是素数。
再散列(Rehashing)
- 当散列表元素太多(即装填因子
太大)时,查找效率会下降;
比如散列表的大小为11,但此时表中以装填的元素已达到了9个,装填因子就很大了,再进行元素的插入就会很容易发生冲突,实用最大装填因子一般取.
- 当装填因子过大时,解决的方法是加倍扩大散列表,这个过程叫做“再散列(Rehashing)”。
例如散列表的大小为11,就加倍扩大成23(素数),再将所有元素重新插入。
分离链接法(Separate Chaining)
分离链接法:将相应位置上冲突的所有关键词存储在同一个单链表中。
分离链接法在逻辑上比较容易理解,看以下的例题:
【例】设关键字序列为47,7,29,11,16,92,22,8,3,50,37,89,94,21;散列函数取为:
;用分离链接法处理冲突。
struct HashTbl
{
int TableSize;
List TheLists;
}*H;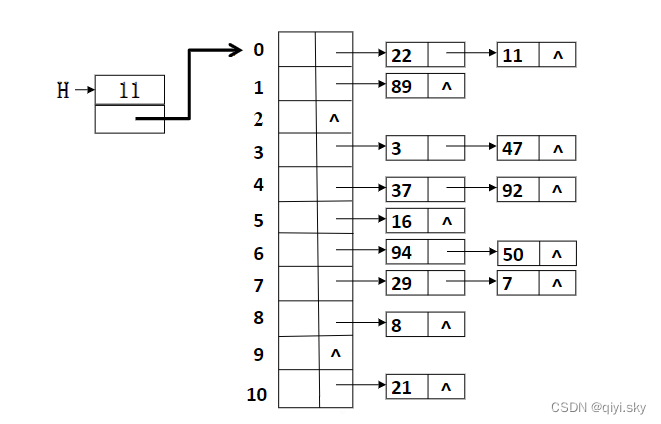
平均查找次数
- 表中有9个结点只需1次查找
- 5个结点需要2次查找
- 查找成功的平均查找次数:
分离链接法的散列表实现
#define KEYLENGTH 15 /* 关键词字符串的最大长度 */
typedef char ElementType[KEYLENGTH+1]; /* 关键词类型用字符串 */
typedef int Index; /* 散列地址类型 */
/******** 以下是单链表的定义 ********/
typedef struct LNode *PtrToLNode;
struct LNode {
ElementType Data;
PtrToLNode Next;
};
typedef PtrToLNode Position;
typedef PtrToLNode List;
/******** 以上是单链表的定义 ********/
typedef struct TblNode *HashTable; /* 散列表类型 */
struct TblNode { /* 散列表结点定义 */
int TableSize; /* 表的最大长度 */
List Heads; /* 指向链表头结点的数组 */
};
HashTable CreateTable( int TableSize )
{
HashTable H;
int i;
H = (HashTable)malloc(sizeof(struct TblNode));
/* 保证散列表最大长度是素数,具体见代码5.3 */
H->TableSize = NextPrime(TableSize);
/* 以下分配链表头结点数组 */
H->Heads = (List)malloc(H->TableSize*sizeof(struct LNode));
/* 初始化表头结点 */
for( i=0; i<H->TableSize; i++ ) {
H->Heads[i].Data[0] = '\0';
H->Heads[i].Next = NULL;
}
return H;
}
Position Find( HashTable H, ElementType Key )
{
Position P;
Index Pos;
Pos = Hash( Key, H->TableSize ); /* 初始散列位置 */
P = H->Heads[Pos].Next; /* 从该链表的第1个结点开始 */
/* 当未到表尾,并且Key未找到时 */
while( P && strcmp(P->Data, Key) )
P = P->Next;
return P; /* 此时P或者指向找到的结点,或者为NULL */
}
bool Insert( HashTable H, ElementType Key )
{
Position P, NewCell;
Index Pos;
P = Find( H, Key );
if ( !P ) { /* 关键词未找到,可以插入 */
NewCell = (Position)malloc(sizeof(struct LNode));
strcpy(NewCell->Data, Key);
Pos = Hash( Key, H->TableSize ); /* 初始散列位置 */
/* 将NewCell插入为H->Heads[Pos]链表的第1个结点 */
NewCell->Next = H->Heads[Pos].Next;
H->Heads[Pos].Next = NewCell;
return true;
}
else { /* 关键词已存在 */
printf("键值已存在");
return false;
}
}
void DestroyTable( HashTable H )
{
int i;
Position P, Tmp;
/* 释放每个链表的结点 */
for( i=0; i<H->TableSize; i++ ) {
P = H->Heads[i].Next;
while( P ) {
Tmp = P->Next;
free( P );
P = Tmp;
}
}
free( H->Heads ); /* 释放头结点数组 */
free( H ); /* 释放散列表结点 */
}
/*
源代码来自:https://www.icourse163.org/learn/ZJU-93001?tid=1469696455#/learn/content?type=detail&id=1252518398&cid=1282086740
*/end
学习自:MOOC数据结构——陈越、何钦铭