1、主要参考
(1)安装
点云数据处理之安装python-openni_mengjiexu_cn的博客-CSDN博客_openni python
(2)打开摄像头
2、安装openni和测试摄像头
2.1 下载安装摄像头驱动
(1)去以下地址下载驱动
https://developer.orbbec.com.cn/download.html?id=32

(2)安装后可以在硬件管理中看到设备

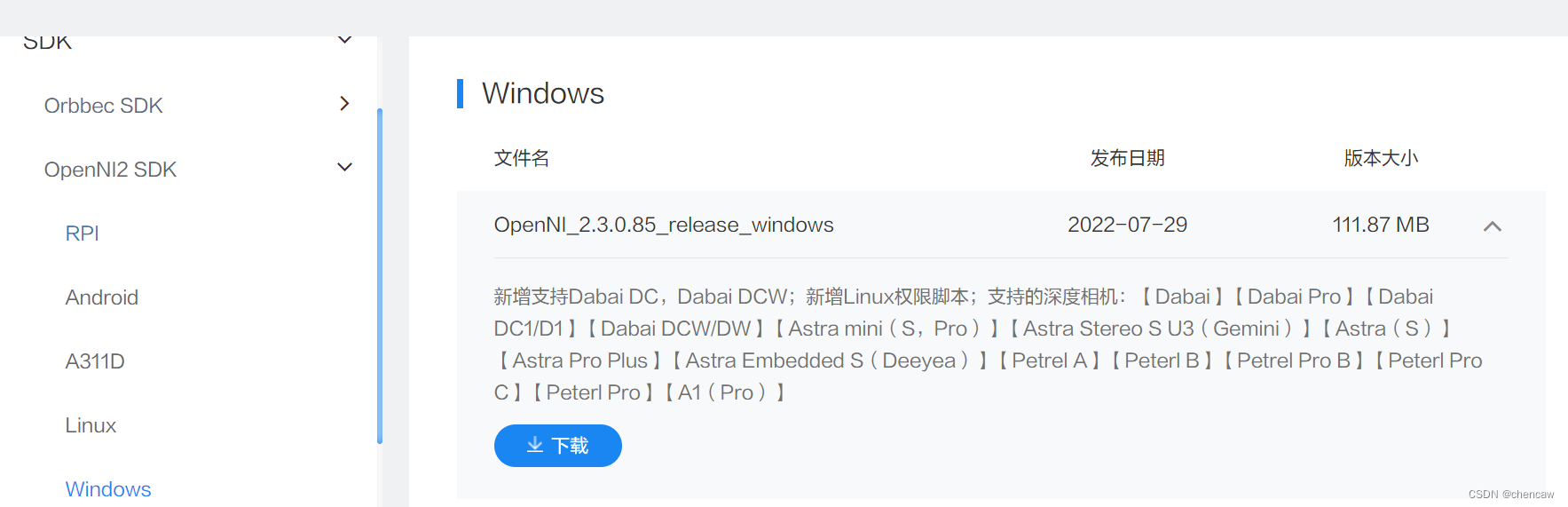
2.2 下载openni(需要用到OpenNI2.dll文件)
(1)在奥比下面的地址下载
https://developer.orbbec.com.cn/download.html?id=65
(2)解压后,将以下1个文件夹、3个文件复制到我们需要的python目录下
OpenNI2文件夹、OpenNI.ini、OpenNI2.dll、OpenNI2.lib
1)来源
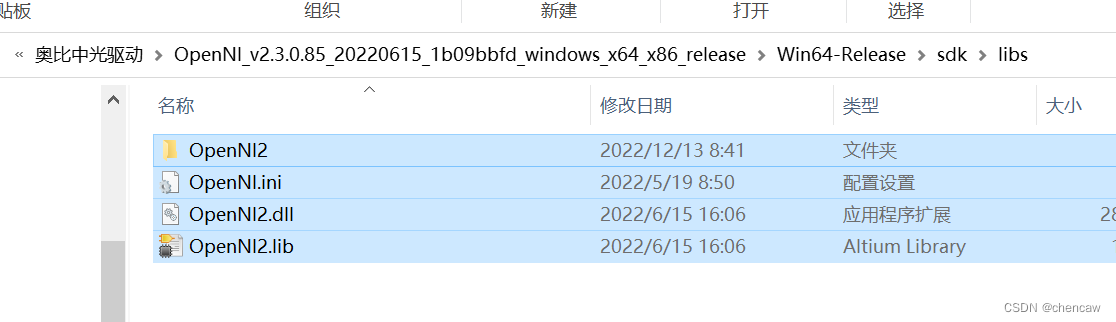
2)复制到
2.3使用清华源安装openni
pip install openni -ihttps://pypi.tuna.tsinghua.edu.cn/simple2.4 测试摄像头
(1)测试代码
from openni import openni2
import numpy as np
import cv2
if __name__ == "__main__":
openni2.initialize()
dev = openni2.Device.open_any()
print(dev.get_device_info())(2)测试结果

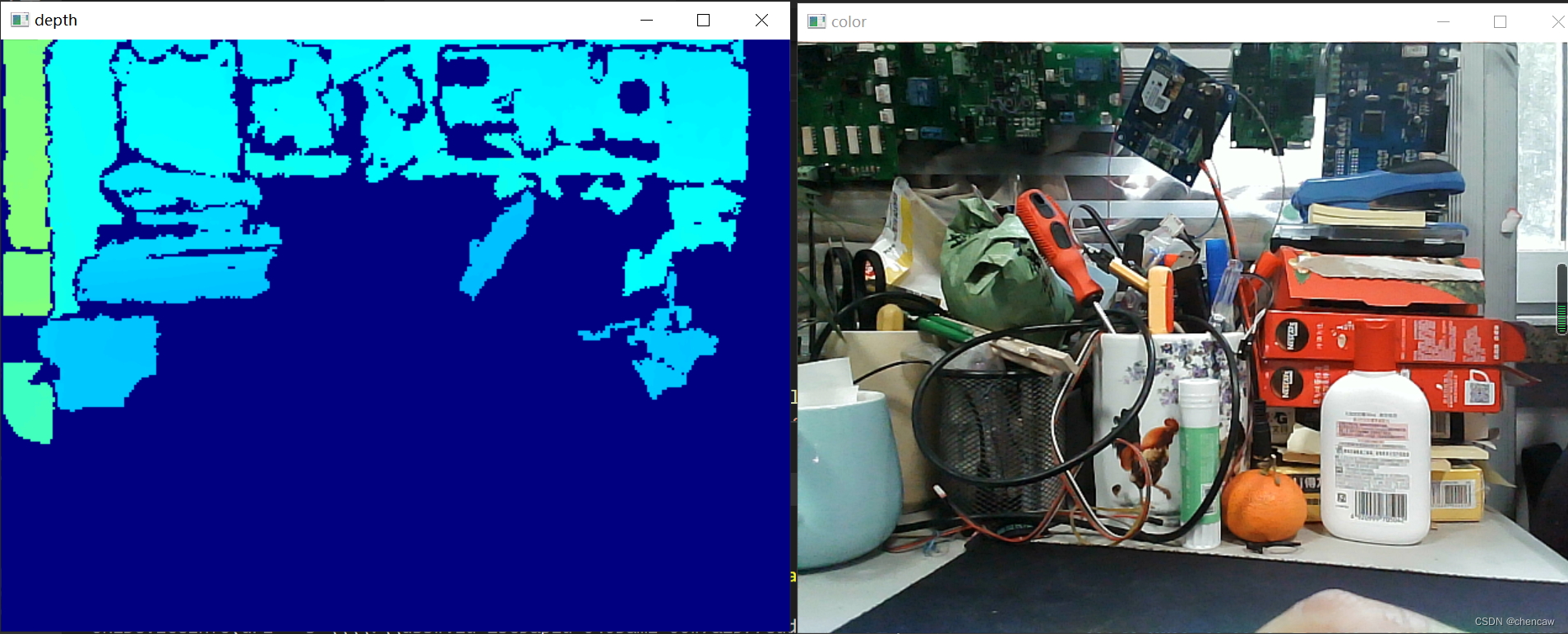
3、捕获和显示深度图
(1)测试代码
from openni import openni2
import numpy as np
import cv2
def mousecallback(event, x, y, flags, param):
if event == cv2.EVENT_LBUTTONDBLCLK:
print(y, x, dpt[y, x])
if __name__ == "__main__":
openni2.initialize()
dev = openni2.Device.open_any()
print(dev.get_device_info())
depth_stream = dev.create_depth_stream()
dev.set_image_registration_mode(True)
depth_stream.start()
cap = cv2.VideoCapture(1)
cv2.namedWindow('depth')
cv2.setMouseCallback('depth', mousecallback)
while True:
frame = depth_stream.read_frame()
#转换数据格式
dframe_data = np.array(frame.get_buffer_as_triplet()).reshape([480, 640, 2])
dpt1 = np.asarray(dframe_data[:, :, 0], dtype='float32')
dpt2 = np.asarray(dframe_data[:, :, 1], dtype='float32')
dpt2 *= 255
#对于为什么要乘于255的解答
#深度图像的深度值 是按照16位长度(两字节)的数据格式存储的,也可以认为前八位是高字节,后八位是低字节。
#因此一张深度图像如果是 640480分辨率的话,那么图像字节大小 就是 640480*2,其中一个字节是8位(255)
dpt = dpt1 + dpt2
#cv2里面的函数,就是类似于一种筛选
'假设我们需要让我们的深度摄像头感兴趣的距离范围有差别地显示,那么我们就需要确定一个合适的alpha值,公式为:有效距离*alpha=255,' \
'假设我们想让深度摄像头8m距离内的深度被显示,>8m的与8m的颜色显示相同,那么alpha=255/(8*10^3)≈0.03,' \
'假设我们想让深度摄像头6m距离内的深度被显示,>6m的与6m的颜色显示相同,那么alpha=255/(6*10^3)≈0.0425'
dim_gray = cv2.convertScaleAbs(dpt, alpha=0.17)
#对深度图像进行一种图像的渲染,目前有11种渲染方式,大家可以逐一去试下
depth_colormap = cv2.applyColorMap(dim_gray, 2) # 有0~11种渲染的模式
cv2.imshow('depth', depth_colormap)
ret, frame = cap.read()
cv2.imshow('color', frame)
key = cv2.waitKey(1)
if int(key) == ord('q'):
break
depth_stream.stop()
dev.close()(2)测试结果