使用AI目标检测进行缺陷检测时,部署到Jetson上即小巧算力还高,将训练好的模型转为tensorRT再部署到Jetson 上供http或GRPC调用。
1 Jetson nx 刷机
找个ubuntu 系统NVIDIA官网下载安装Jetson 的sdkmanager一步步刷机即可。
本文刷的是JetPack 5.1, 其中包含
CUDA 11.4
cuDNN 8.6.0
TensorRT 8.5.2.2
Python 3.8.10
Ubuntu 20.04
2 下载解压/安装/测试Triton Server
其实triton server 不用安装,直接下载解压开箱即用,要安装的是一堆依赖。
下载triton server 软件包,Release 2.35.0 corresponding to NGC container 23.06
找到下面tritonserver2.35.0-jetpack5.1.2.tgz下载到Jetson并解压到home。
根据jetson.md安装triton server 的依赖包,如果不在jetson上使用triton 客户端可以不装triton client 的依赖。
将Triton server main分支下的docs文件夹下载后放到home/tritonserver2.35.0-jetpack5.1.2/tritonserver中,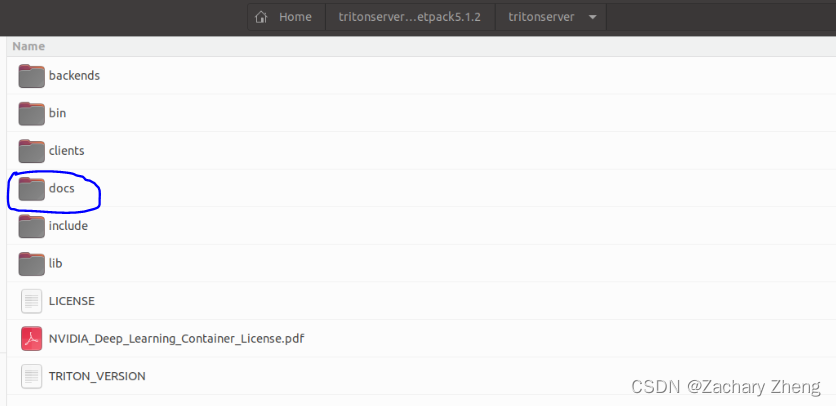
$ cd docs/examples
$ ./fetch_models.sh
下载示例模型,cd 到home/tritonserver2.35.0-jetpack5.1.2/tritonserver/bin
$./tritonserver --model-repository=…/docs/examples/model_repository --backend-directory=…/backends
如果看到下图8001/8000/8002 说明示例打开成功,triton server 安装成功。 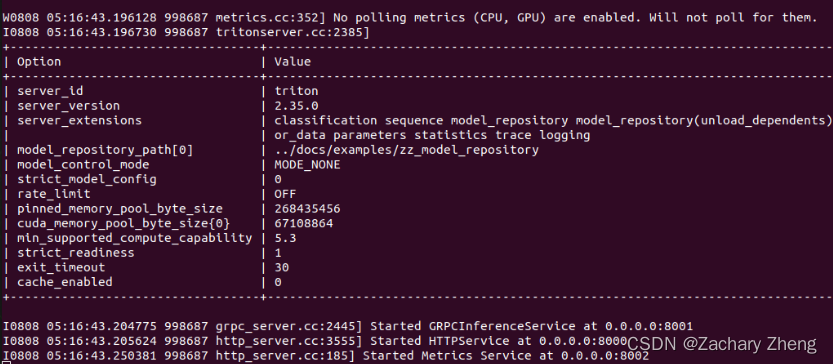
3 Train yolov5 model
使用ultralytics的yolov5 模型train 一个自己的model, 我选用的是yolov5l6,略微大一些, best.pt 153.1MB。
4 .pt 转ONNX 转TensorRT
个人认为只有使用TensorRT模型部署NVIDIA显卡才是推理速度最极致的体验。
Jetson 上官网下载一个Pycharm 软件压缩包,新建python环境。
安装yolov5的依赖,参考Deploy on NVIDIA Jetson using TensorRT and DeepStream SDK
安装到pytorch 和torchvision 即可,
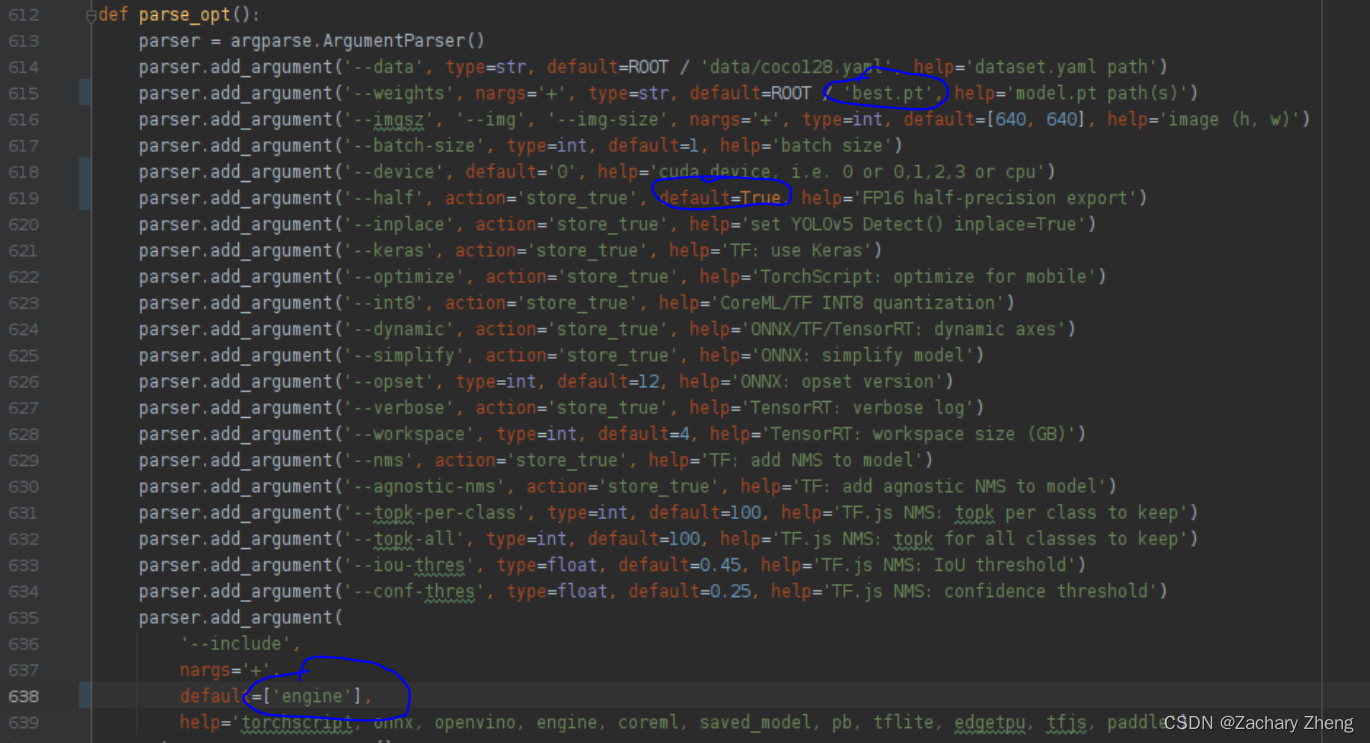
再使用yolov5文件夹内export.py
修改615行 --weights default ROOT / ‘best.py’
修改619行增加default=True使用半精度
修改638行default=[‘engine’]
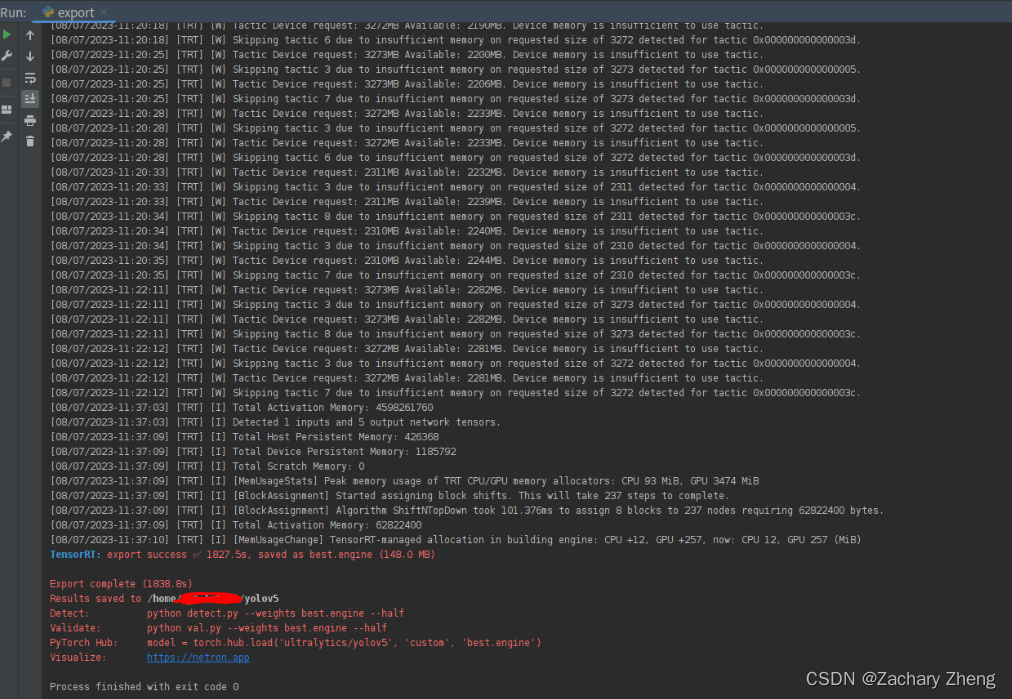
Terminal $python3 export.py 可以看到log是先生成best.onnx再生成best.engine
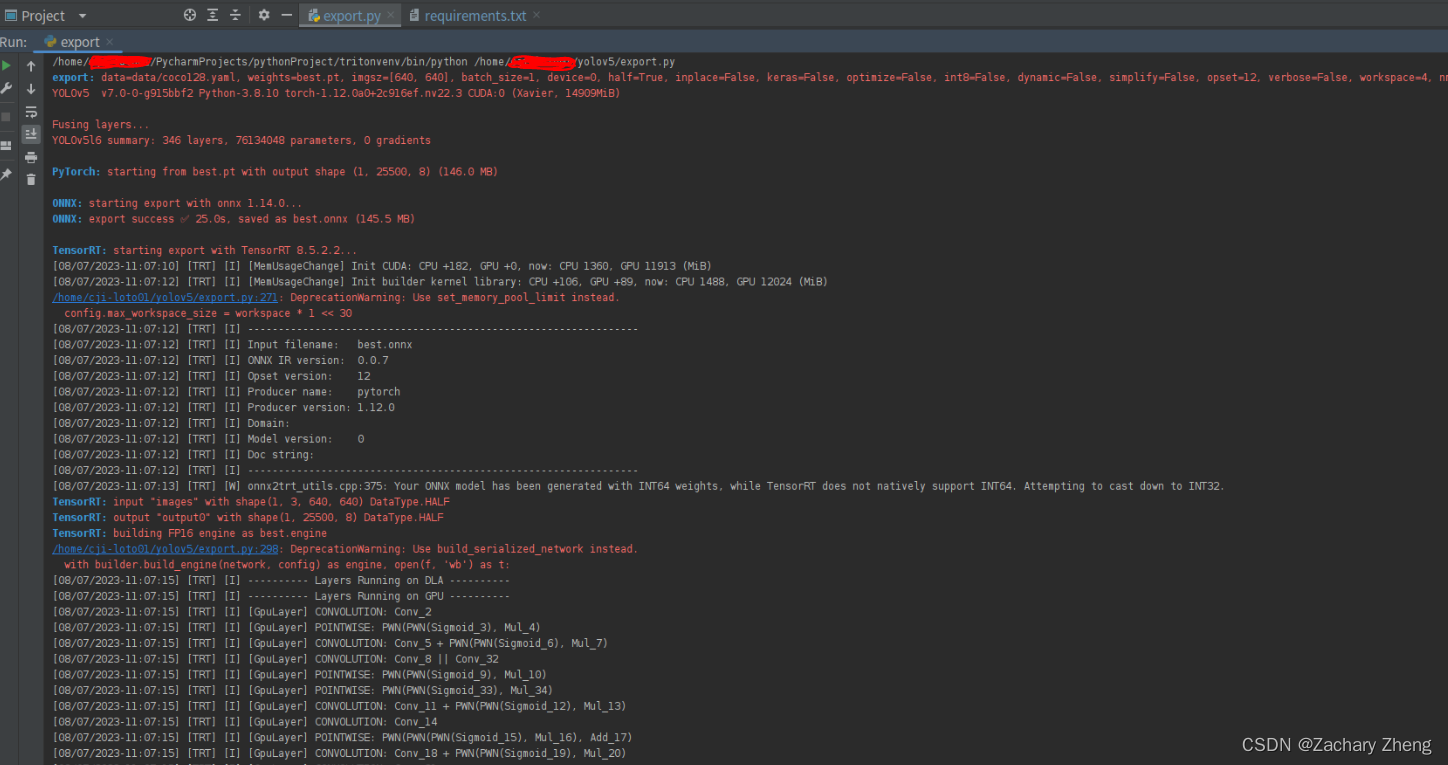
半小时后转化完毕。
5部署yolov5 到triton sever
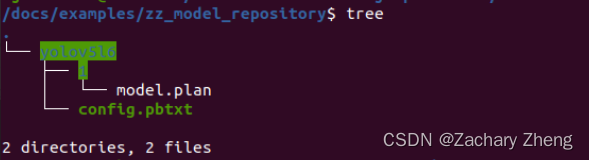
在examples文件夹下新建自己的模型仓库文件夹zz_model_repository
新建模型文件夹yolov5l6再新建名称为1 的文件夹将best.engine copy进来改名为model.plan
在yolov5l6下新建文件config.pbtxt输入以下内容:
name: "yolov5l6"
platform: "tensorrt_plan"
max_batch_size: 1
input [
{
name: 'images'
data_type: TYPE_FP16
format: FORMAT_NCHW
dims: [3, 640, 640]
}
]
output [
{
name: 'output0'
data_type: TYPE_FP16
dims: [25500, 8]
}
]
backend: 'tensorrt'
同样cd 到home/tritonserver2.35.0-jetpack5.1.2/tritonserver/bin
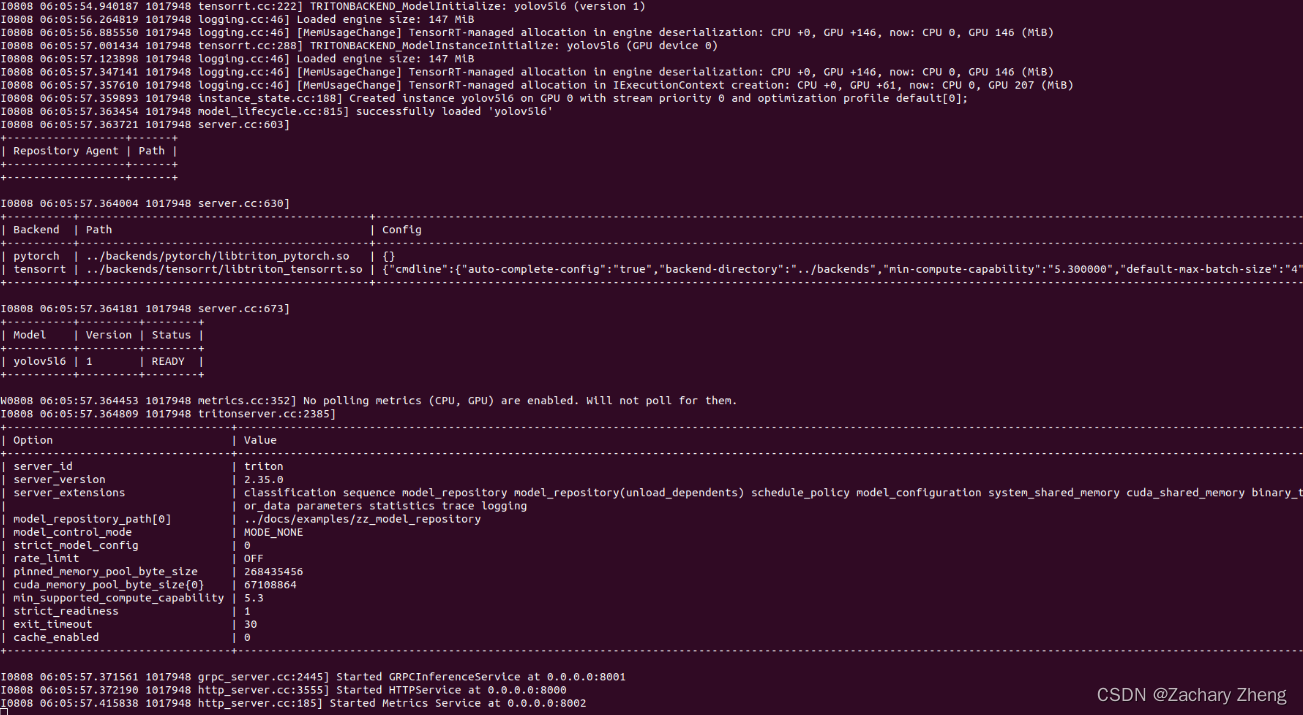
$./tritonserver --model-repository=…/docs/examples/zz_model_repository --backend-directory=…/backends
出现下图说明模型加载成功。
6Triton client 调用模型
这一部分就是开发相机,图像前处理,调用模型,图像后处理部分了,略过。






![[HDLBits] Exams/m2014 q4i](https://img-blog.csdnimg.cn/img_convert/369c23832ad76bbf33eadd9f1c2b7ab7.png)