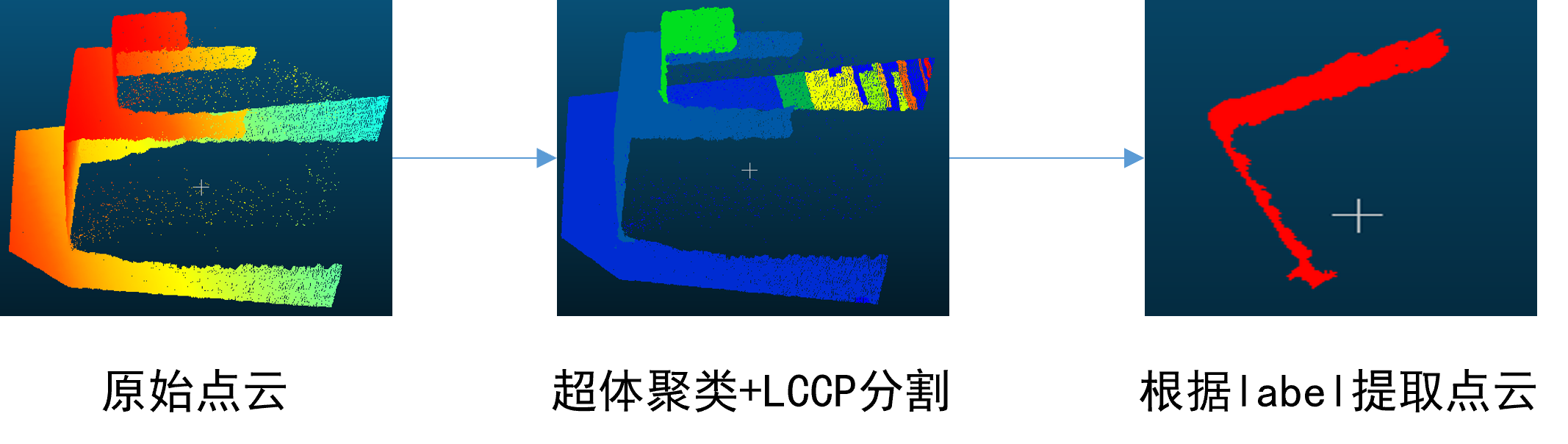
凹凸型分割算法适用于颜色类似、棱角分明的物体场景分割。
算法流程:
1、基于超体聚类的过分割;
2、在超体聚类的基础上再聚类。
示例代码:
//超体聚类+LCCP
//#include "stdafx.h"
#include <stdlib.h>
#include <cmath>
#include <limits.h>
#include <boost/format.hpp>
#include <fstream>
#include <pcl/console/parse.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/visualization/point_cloud_color_handlers.h>
#include <pcl/visualization/cloud_viewer.h>
#include <pcl/filters/passthrough.h>
#include <pcl/segmentation/supervoxel_clustering.h>
#include <pcl/segmentation/lccp_segmentation.h>
#define Random(x) (rand() % x)
typedef pcl::PointXYZRGBA PointT;
typedef pcl::LCCPSegmentation<PointT>::SupervoxelAdjacencyList SuperVoxelAdjacencyList;
int main(int argc, char ** argv)
{
//输入点云
pcl::PointCloud<PointT>::Ptr input_cloud_ptr(new pcl::PointCloud<PointT>);
pcl::PCLPointCloud2 input_pointcloud2;
if (pcl::io::loadPCDFile("E:\\PercipioVision\\depth2pointcloud\\testdata\\test-Cloud1.pcd", input_pointcloud2))
{
PCL_ERROR("ERROR: Could not read input point cloud ");
return (3);
}
pcl::fromPCLPointCloud2(input_pointcloud2, *input_cloud_ptr);
PCL_INFO("Done making cloud\n");
//粒子距离,体素大小,空间八叉树的分辨率,类kinect或xtion获取的数据,0.008左右合适
float voxel_resolution = 2.0f;
//晶核距离,种子的分辨率,一般可设置为体素分辨率的50倍以上
float seed_resolution = 100.0f;
//颜色容差,针对分割场景,如果分割场景中各个物体之间的颜色特征差异明显,可设置较大
float color_importance = 0.1f;
//设置较大且其他影响较小时,基本按照空间分辨率来决定体素分割
float spatial_importance = 1.0f;
//针对分割场景,如果分割场景中各个物体连通处的法线特征差异明显,可设置较大,
//但在实际使用中,需要针对数据的结构适当考虑,发现估计的准确性等因素
float normal_importance = 4.0f;
bool use_single_cam_transform = false;
bool use_supervoxel_refinement = false;
unsigned int k_factor = 0;
//voxel_resolution is the resolution (in meters) of voxels used、seed_resolution is the average size (in meters) of resulting supervoxels
pcl::SupervoxelClustering<PointT> super(voxel_resolution, seed_resolution);
super.setUseSingleCameraTransform(use_single_cam_transform);
super.setInputCloud(input_cloud_ptr);
//Set the importance of color for supervoxels.
super.setColorImportance(color_importance);
//Set the importance of spatial distance for supervoxels.
super.setSpatialImportance(spatial_importance);
//Set the importance of scalar normal product for supervoxels.
super.setNormalImportance(normal_importance);
std::map<uint32_t, pcl::Supervoxel<PointT>::Ptr> supervoxel_clusters;
PCL_INFO("Extracting supervoxels\n");
super.extract(supervoxel_clusters);
PCL_INFO("Getting supervoxel adjacency\n");
std::multimap<uint32_t, uint32_t> supervoxel_adjacency;
super.getSupervoxelAdjacency(supervoxel_adjacency);
pcl::PointCloud<pcl::PointNormal>::Ptr sv_centroid_normal_cloud = pcl::SupervoxelClustering<PointT>::makeSupervoxelNormalCloud(supervoxel_clusters);
//LCCP分割
float concavity_tolerance_threshold = 20;
float smoothness_threshold = 0.2;
uint32_t min_segment_size = 0;
bool use_extended_convexity = false;
bool use_sanity_criterion = false;
PCL_INFO("Starting Segmentation\n");
pcl::LCCPSegmentation<PointT> lccp;
//设置CC判断的依据
lccp.setConcavityToleranceThreshold(concavity_tolerance_threshold);
//设置是否使用阶梯检测,这个条件会检测两个超体素之间是否是一个step。
//如果两个超体素之间的面到面距离>expected_distance + smoothness_threshold_*voxel_resolution_则这个两个超体素被判定为unsmooth并被标记为凹。
lccp.setSmoothnessCheck(true, voxel_resolution, seed_resolution, smoothness_threshold);
//设置CC判断中公共距离被判定为凸的个数
lccp.setKFactor(k_factor);
//输入超体分割后的点云
lccp.setInputSupervoxels(supervoxel_clusters, supervoxel_adjacency);
lccp.setMinSegmentSize(min_segment_size);
lccp.segment();
PCL_INFO("Interpolation voxel cloud -> input cloud and relabeling\n");
pcl::PointCloud<pcl::PointXYZL>::Ptr sv_labeled_cloud = super.getLabeledCloud();
pcl::PointCloud<pcl::PointXYZL>::Ptr lccp_labeled_cloud = sv_labeled_cloud->makeShared();
lccp.relabelCloud(*lccp_labeled_cloud);
SuperVoxelAdjacencyList sv_adjacency_list;
lccp.getSVAdjacencyList(sv_adjacency_list);
// 根据label值提取点云
int j = 0;
pcl::PointCloud<pcl::PointXYZL>::Ptr ColoredCloud2(new pcl::PointCloud<pcl::PointXYZL>);
ColoredCloud2->height = 1;
ColoredCloud2->width = lccp_labeled_cloud->size();
ColoredCloud2->resize(lccp_labeled_cloud->size());
for (int i = 0; i < lccp_labeled_cloud->size(); i++) {
if (lccp_labeled_cloud->points[i].label == 3) {
ColoredCloud2->points[j].x = lccp_labeled_cloud->points[i].x;
ColoredCloud2->points[j].y = lccp_labeled_cloud->points[i].y;
ColoredCloud2->points[j].z = lccp_labeled_cloud->points[i].z;
ColoredCloud2->points[j].label = lccp_labeled_cloud->points[i].label;
j++;
}
}
pcl::io::savePCDFileASCII("E:\\PercipioVision\\depth2pointcloud\\testdata\\3.pcd", *ColoredCloud2);
// Configure Visualizer
//pcl::visualization::PCLVisualizer viewer = pcl::visualization::PCLVisualizer("3D Viewer", false);
//viewer.addPointCloud(lccp_labeled_cloud, "Segmented point cloud");
pcl::io::savePCDFileASCII("E:\\PercipioVision\\depth2pointcloud\\testdata\\分割后合并.pcd", *lccp_labeled_cloud);
return 0;
}