文章目录
- 1. 方法原理
- 1.1 动机与贡献
- 1.2 方法细节
- (1) Noise2Void
- (2) re-visible without identity mapping
- (3) 综合说明
- 2. 效果
- 3. 总结
1. 方法原理
1.1 动机与贡献
摘要要点:基于盲点去噪的网络受网络设计和/或输入数据的影响会丢失部分信息 --> 有价值的信息损失会降低去噪的上限, 改进的方向:
- 引入一个全局感知的掩码映射,加速训练
- 使用一种 re-visible 的损失函数训练网络
改进的一些难点:
- 盲点占据数据的很大部分,预测像素点的感受野会丢失很多有价值的信息,降低网络性能
- 每次迭代中只优化部分像素会导致收敛变慢
- 很多工作对噪声对进行训练,要求噪声的分布是相同的
Blind2Unblind具体内容:
- 将每个噪声图像分块,并将每个快中的特定像素设置为盲点,得到了一个全局蒙版作为输入
- 将这些全局蒙版作为一个batch输入到网络之中
- 全局映射器对盲点位置的噪声体进行采样,投影到同一个平面上进行去噪
小结
-
动机:Noise2Void 盲点网络可以避免恒等映射,但是会损失信息,从而影响去噪的效果
-
挑战:如何将不可见的盲点转换为可见的盲点?既能利用盲点结构去噪,也能利用全部的信息提高性能
-
贡献:
- 提出了一种新的自监督去噪框架,使盲点位置像素可见,无需子样本,噪声模式先验和恒等映射。
- 提供了re-visible 损失的理论分析,给出了这种损失收敛的上限和下限
1.2 方法细节
(1) Noise2Void
N2V目标是最小化 a r g m i n θ E y ∣ ∣ f θ ( y R F ( i ) ) − y i ∣ ∣ 2 2 \underset{\theta}{argmin} E_y ||f_{\theta}(y_{RF(i)}) - y_i||_2^2 θargminEy∣∣fθ(yRF(i))−yi∣∣22
这里的 f θ ( . ) f_{\theta}(.) fθ(.)就是去噪网络, y R F ( i ) y_{RF(i)} yRF(i)是去噪中心i附近的patch, y i y_i yi是中心像素点。
注意该方法的强假设条件:
- 信号是不相互独立的
- 给定信号的条件下,噪声是相互独立的
- 噪声的均值是0
(2) re-visible without identity mapping
从多任务中借鉴其优化目标
a
r
g
m
i
n
θ
E
y
∣
∣
h
(
f
θ
(
Ω
y
)
)
−
y
∣
∣
2
2
+
λ
.
∣
∣
f
θ
(
y
)
−
y
∣
∣
2
2
\underset{\theta}{argmin} E_y ||h(f_{\theta}(\Omega_y)) - y||_2^2 + \lambda . ||f_{\theta}(y) - y||_2^2
θargminEy∣∣h(fθ(Ωy))−y∣∣22+λ.∣∣fθ(y)−y∣∣22
其中, Ω y \Omega_y Ωy表示掩码体; h ( . ) h(.) h(.)是一个全局感知掩码映射器,用于对盲点所在的去噪像素进行采样,λ 是一个常数。
用L1范数表示
a
r
g
m
i
n
θ
∣
∣
h
(
f
θ
(
Ω
y
)
)
−
y
∣
∣
1
+
λ
.
∣
∣
f
^
θ
(
y
)
−
y
∣
∣
1
\underset{\theta}{argmin} ||h(f_{\theta}(\Omega_y)) - y||_1 + \lambda . ||\hat{f}_{\theta}(y) - y||_1
θargmin∣∣h(fθ(Ωy))−y∣∣1+λ.∣∣f^θ(y)−y∣∣1
其中, f ^ θ ( y ) \hat{f}_{\theta}(y) f^θ(y) 不需要求梯度,对梯度没有贡献。
那么优化目标可以构建为
a
r
g
m
i
n
θ
∣
∣
∣
h
(
f
θ
(
Ω
y
)
)
−
y
∣
+
λ
.
∣
f
^
θ
(
y
)
−
y
∣
∣
∣
2
2
\underset{\theta}{argmin} || |h(f_{\theta}(\Omega_y)) -y | + \lambda . |\hat{f}_{\theta}(y) - y| ||_2^2
θargmin∣∣∣h(fθ(Ωy))−y∣+λ.∣f^θ(y)−y∣∣∣22
转换一下变为损失函数的形式
T
(
y
)
=
∣
∣
∣
h
(
f
θ
(
Ω
y
)
)
−
y
∣
+
λ
.
∣
f
^
θ
(
y
)
−
y
∣
∣
∣
2
2
=
∣
∣
h
(
f
θ
(
Ω
y
)
)
−
y
∣
∣
2
2
+
λ
2
∣
∣
f
^
θ
(
y
)
−
y
∣
∣
2
2
+
2
λ
∣
∣
(
h
(
f
θ
(
Ω
y
)
)
−
y
)
.
(
f
^
θ
(
y
)
−
y
)
∣
∣
1
\begin{aligned} \Tau(y) &= || |h(f_{\theta}(\Omega_y)) -y | + \lambda . |\hat{f}_{\theta}(y) - y| ||_2^2 \\ &= ||h(f_{\theta}(\Omega_y)) -y||_2^2 + \lambda ^2 ||\hat{f}_{\theta}(y) -y||_2^2 + 2\lambda ||(h(f_{\theta}(\Omega_y)) - y) . (\hat{f}_{\theta}(y) -y) ||_1 \end{aligned}
T(y)=∣∣∣h(fθ(Ωy))−y∣+λ.∣f^θ(y)−y∣∣∣22=∣∣h(fθ(Ωy))−y∣∣22+λ2∣∣f^θ(y)−y∣∣22+2λ∣∣(h(fθ(Ωy))−y).(f^θ(y)−y)∣∣1
然后又根据一些推导分析,得到了 re-visible的最大似然形式(没太仔细推导)
a r g m i n θ E y ∣ ∣ h ( f θ ( Ω y ) ) + λ f ^ θ ( y ) − ( λ + 1 ) y ∣ ∣ 2 2 \underset{\theta}{argmin} E_y ||h(f_{\theta}(\Omega_y)) + \lambda \hat{f}_{\theta}(y) - (\lambda+1)y||_2^2 θargminEy∣∣h(fθ(Ωy))+λf^θ(y)−(λ+1)y∣∣22
最后化的去噪结果是
x ^ = h ( f θ ∗ ( Ω y ) ) + λ f ^ θ ∗ ( y ) λ + 1 \hat{x} = \frac{h(f_{\theta}^*(\Omega_y)) + \lambda \hat{f}_{\theta}^*(y)}{\lambda+1} x^=λ+1h(fθ∗(Ωy))+λf^θ∗(y)
(3) 综合说明

具体说明:
将一个含有噪声的输入图片y分为两个分支进行处理
-
上面一个分支
- 上面的分支将y输入到 Global masker中,该模块将图像都划分为2*2的小块(示例),然后在每个小块中分别mask 左上、左下、右上、右下的像素,形成4个盲点图像(即每张图片被mask掉25%的区域)
- 将mask的图像输入到U-Net网络之中,预测被mask掉的区域
- 经过Global mask mapper,把每张图被mask的25%区域的聚合形成一张去噪后的图像
-

-
下面一个分支:
- 直接将又噪声的数据输入到U-Net之中,用来弥补网络信息确实的问题。
- 为了避免网络学到恒等映射,这个部分不进行梯度反传。
需要注意的是,存粹的re-visible损失只有一个变量,可以用来反传优化盲点项和visible项目,其优化过程非常不稳定,所以作者在实现的实现的时候加入了一个正则项约束这个过程。用损失函数来看就是下面着两个部分
L
=
L
r
e
v
+
η
.
L
r
e
g
=
∣
∣
h
(
f
θ
(
Ω
y
)
)
+
λ
f
^
θ
(
y
)
−
(
λ
+
1
)
y
∣
∣
2
2
+
η
.
∣
∣
h
(
f
θ
(
Ω
y
)
)
−
y
∣
∣
2
2
\begin{aligned} L &= L_{rev} + \eta. L_{reg} \\ &= ||h(f_{\theta}(\Omega_y)) + \lambda \hat{f}_{\theta}(y) - (\lambda+1)y||_2^2 + \eta . ||h(f_{\theta}(\Omega_y)) - y||_2^2 \end{aligned}
L=Lrev+η.Lreg=∣∣h(fθ(Ωy))+λf^θ(y)−(λ+1)y∣∣22+η.∣∣h(fθ(Ωy))−y∣∣22
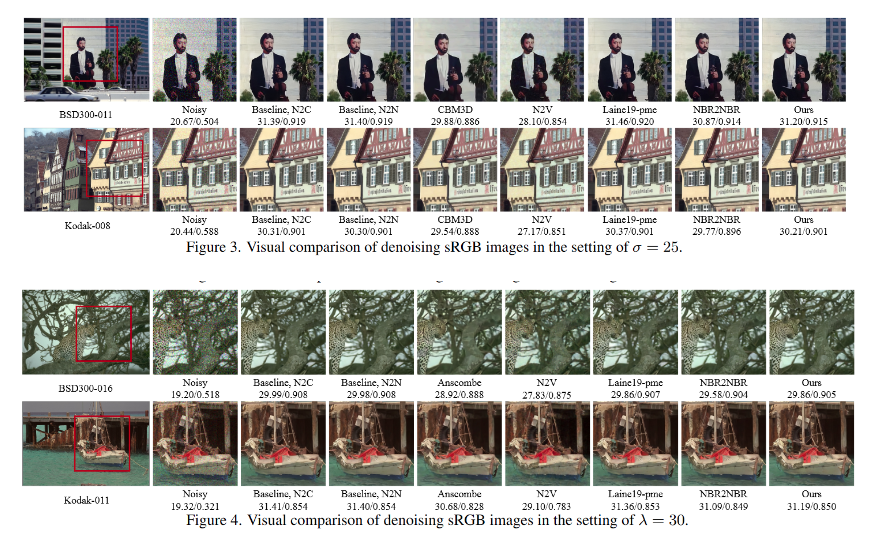
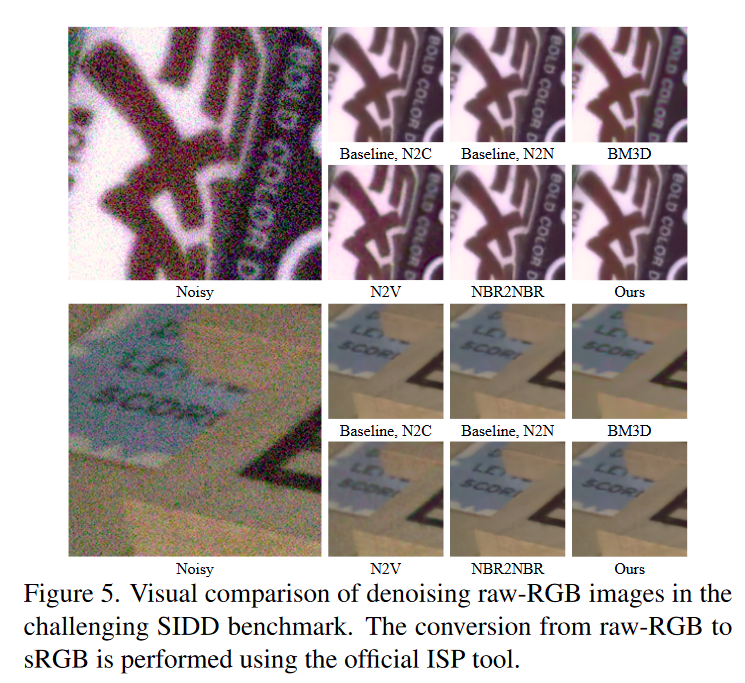
2. 效果
不同方法对比
3. 总结
- 在Noise2Void 盲点网络的基础上实现了既要又要:既要盲点网络,又要被盲点位置上的原始信息
- 零均值、噪声独立等假设仍然限制这一流派在实际噪声数据应用时的泛化性