文章目录
- openpnp - 吸嘴站(Nozzle Tip Changer)的选择
- 概述
- 磁铁吸嘴库
- 带抱轴的吸嘴库
- 我的吸嘴库选择
- 我的吸嘴库实现 - 磁铁吸嘴库
- 吸嘴座主体
- 吸嘴座上盖
- 我的吸嘴库实现 - 带抱轴的吸嘴库
- 吸嘴座主体
- 拔吸嘴时的受力挡板
- 抱轴层
- 上盖
- 备注
- END
openpnp - 吸嘴站(Nozzle Tip Changer)的选择
概述
如果板子上有不同大小的料, 就会使用多个吸嘴, 同时使用吸嘴库来配合自动换刀(吸嘴).
查了资料, 吸嘴库大致分为3种: 电动吸嘴库, 磁铁吸嘴库, 带抱轴的吸嘴库.
我设备上自带的吸嘴库是电动吸嘴库. 冰沙主板用开关量来控制电磁铁动作, 电磁铁连杆拉开吸嘴库顶部盖板, 然后N1/N2来取放吸嘴.
这种电动吸嘴库使用和校验是比较方便的(只需要定义通讯的action来控制主板开关量, 动作只有定位, 降低, 抬高这3种), 但是有以下缺点:
- 电磁铁通电时间不能超过30秒, 否则电磁铁烧毁. 同学在调试设备时, 不小心, 让电磁铁通电超过了30秒, 已经烧毁了, 闻到糊味, 他才知道主板控制电磁铁的开关量一直开着.
- 比较占地方, 吸嘴库是放在设备工作平面上的. 像我这个电动吸嘴库, 只能放6(3x2)个吸嘴. 同学说, 我可以改一版, 将吸嘴库的座子改为3x4, 那样就可以放12个吸嘴. 那我还是担心第一个通电时间的缺点, 这个解决不了, 还是很心虚的.
磁铁吸嘴库
国内的openpnp玩家, 经常使用这个方案. 纯机械吸嘴库的座子, 里面加了条形磁铁, 让归位的吸嘴轴被磁铁固定, 下次取放吸嘴的时候, 坐标比较确定.
这个方案简单可行.
缺点:
- 对吸嘴会做磁化, 如果吸取一些对磁敏感的元件, 有可能对元件造成损坏.
- 只适合金属吸嘴, 如果以后买了陶瓷吸嘴, 这个吸嘴座就失效了, 无法对非金属吸嘴进行磁吸固定.
带抱轴的吸嘴库
查资料时, 看到开源的方案中, 有带抱轴的吸嘴库.
这种方案, 是纯机械的吸嘴座. 使用了多层3D打印件组合在一起用.
吸嘴座主体 + 拔起吸嘴时的档板层 + 吸嘴归位处的抱轴扶手(吸嘴X/Y方向移动到抱轴中心时, 吸嘴会被2个抱轴扶手固定住) + 顶层盖板.
这种方案, 理论上是比较好的. 看不出有啥缺点.
我的吸嘴库选择
我没有选择电动吸嘴库.电磁铁最多只能通电30秒, 这个还是挺心虚的.
对磁铁吸嘴库和带抱轴的吸嘴库, 我分别做了对应的版本. 已经送出去加工了, 等回来试试.
受限于已有的机械结构设计, 吸嘴库面积只能为 136.5mm x 70.2mm, 这样最多可以做一个装12个吸嘴的吸嘴库.

我的吸嘴库实现 - 磁铁吸嘴库
磁铁藏在上盖中, 对应吸嘴中部轴的位置. 磁铁位置如果不对应吸嘴中部, 会导致吸嘴被磁吸后歪斜, 就无法用N1/N2来取放吸嘴了.
这个版本只有2个零件(主体 + 上盖)
吸嘴座主体
吸嘴座上盖
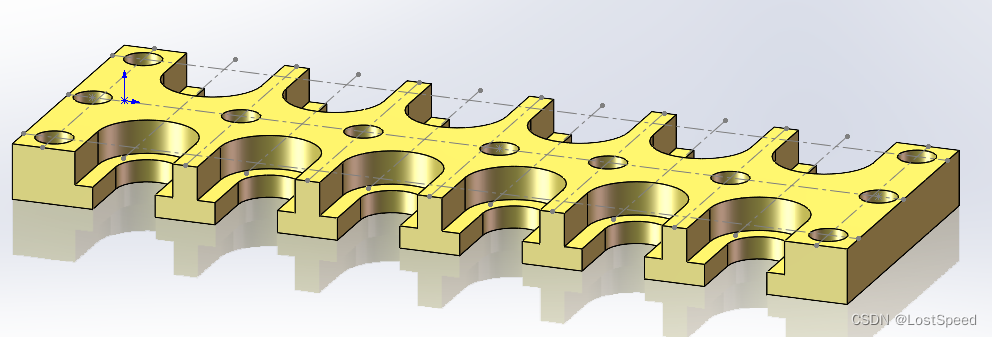
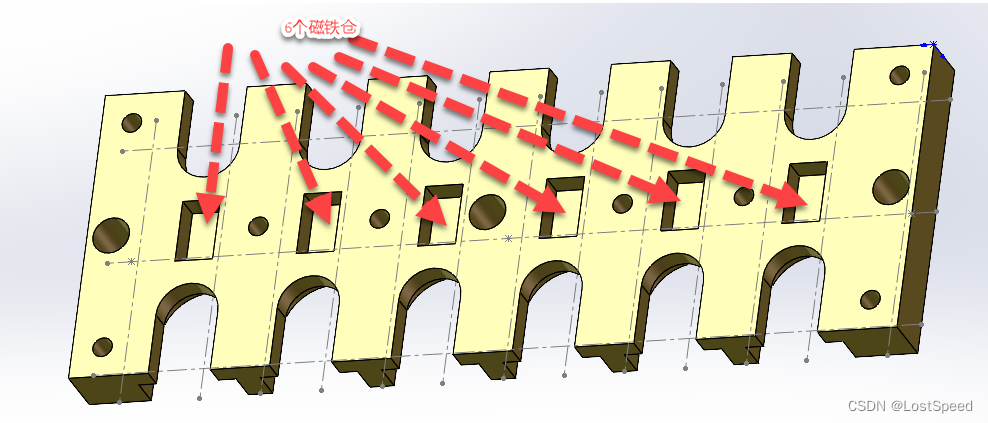
上盖中有6个磁铁仓, 使用的磁铁是长方形磁铁(6mm x 4mm x 10mm), 磁铁的厚度基本和产生的吸附距离相当.
2mm厚的磁铁的最大吸附距离为2mm
4mm厚的磁铁的最大吸附距离为4mm
磁铁充磁方向一般为厚度充磁, 如果使用厚度方向的2个面(6mm x 10mm的那个面), 会产生更大的吸附磁力. 但是由于空间所限, 只能使用(4mm x 6mm)的那个面.
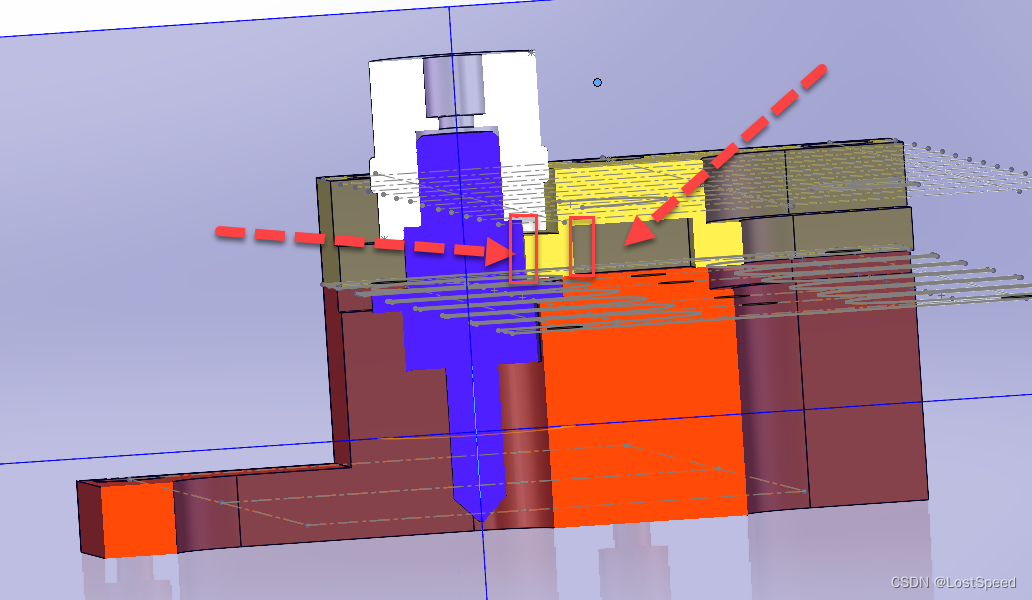
观察吸嘴中部固定轴和对应磁铁的刨面, 可以看到, 只有磁铁位于吸嘴中部的轴, 才能在吸附后, 保持吸嘴的垂直.
同时, 也要保持吸嘴中部轴和座子之间, 要有一个宽度(2~4mm)的环形支撑, 才能保证吸嘴被磁吸后, 保持垂直.
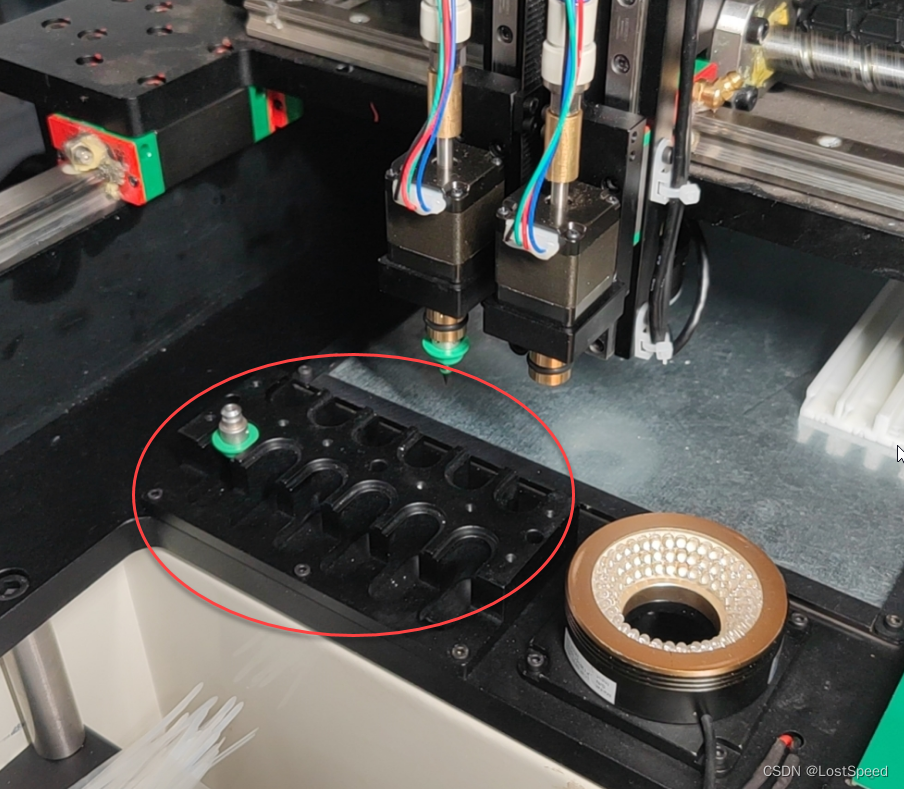
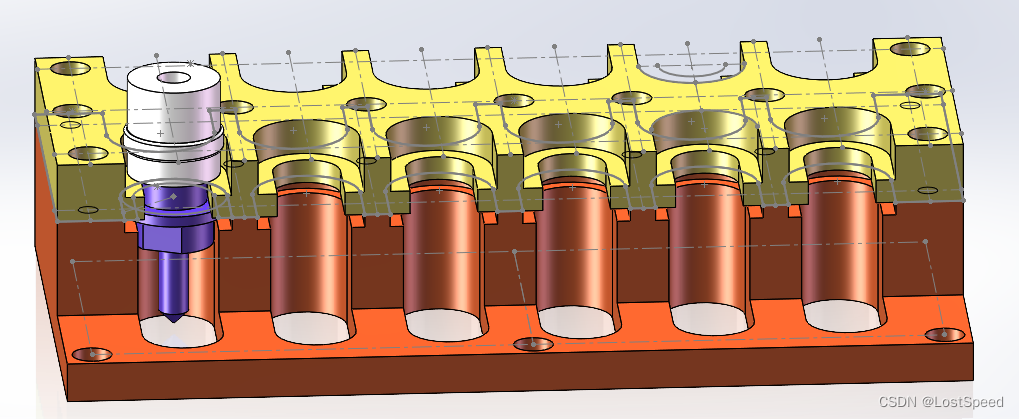
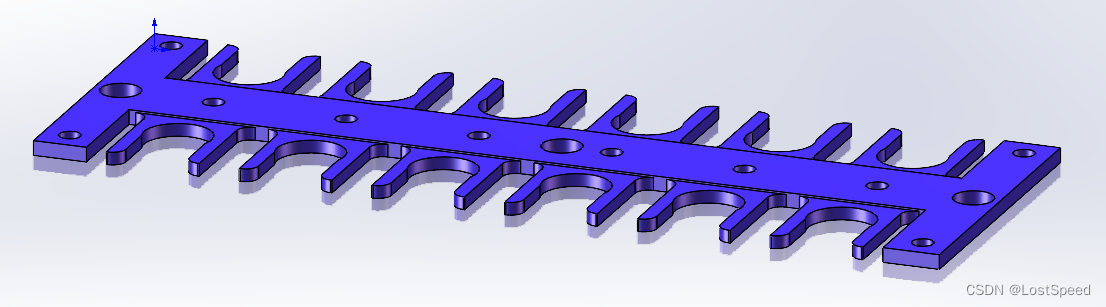
我的吸嘴库实现 - 带抱轴的吸嘴库
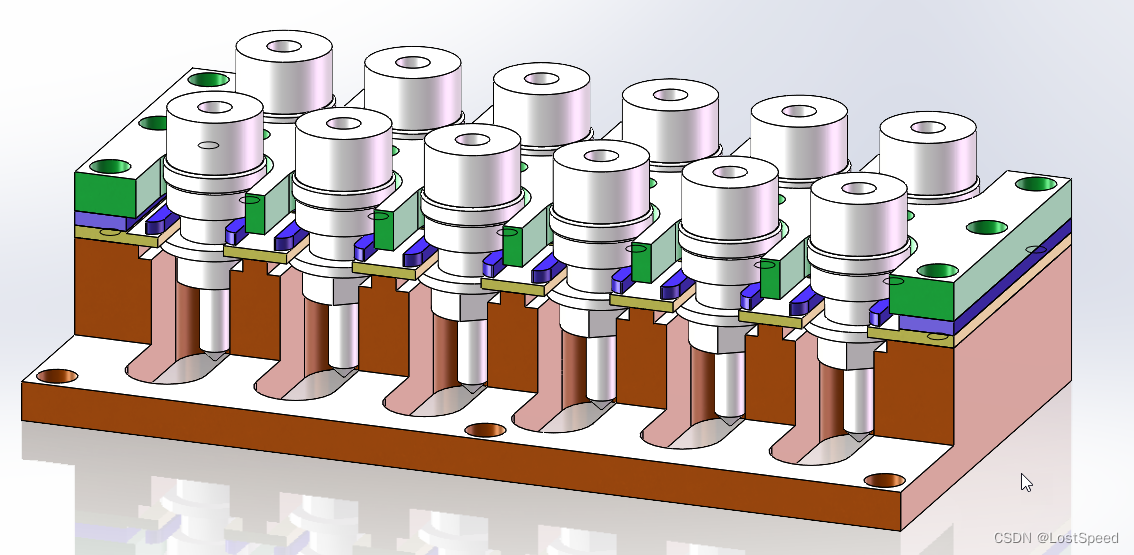
这个版本有4个零件(吸嘴座主体 + 拔吸嘴时的受力挡板 + 抱轴层 + 上盖)
我倾向于用这个版本, 以后换陶瓷吸嘴就不受影响了.
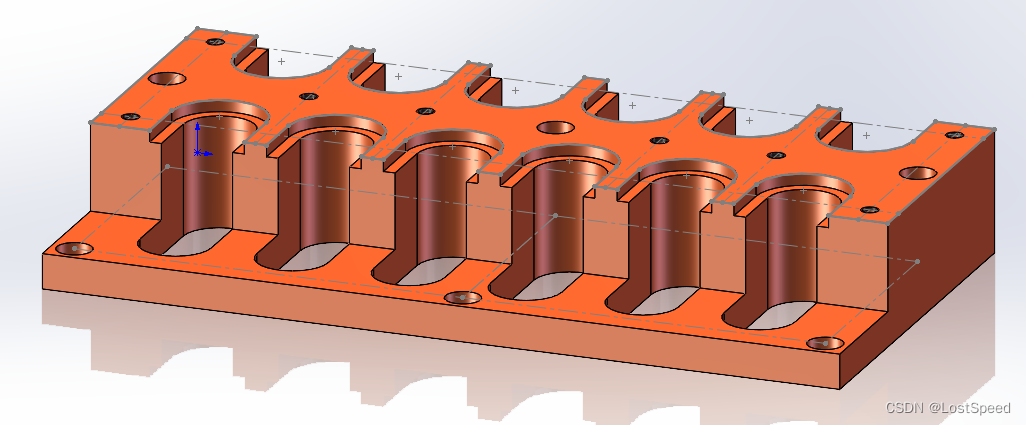
吸嘴座主体
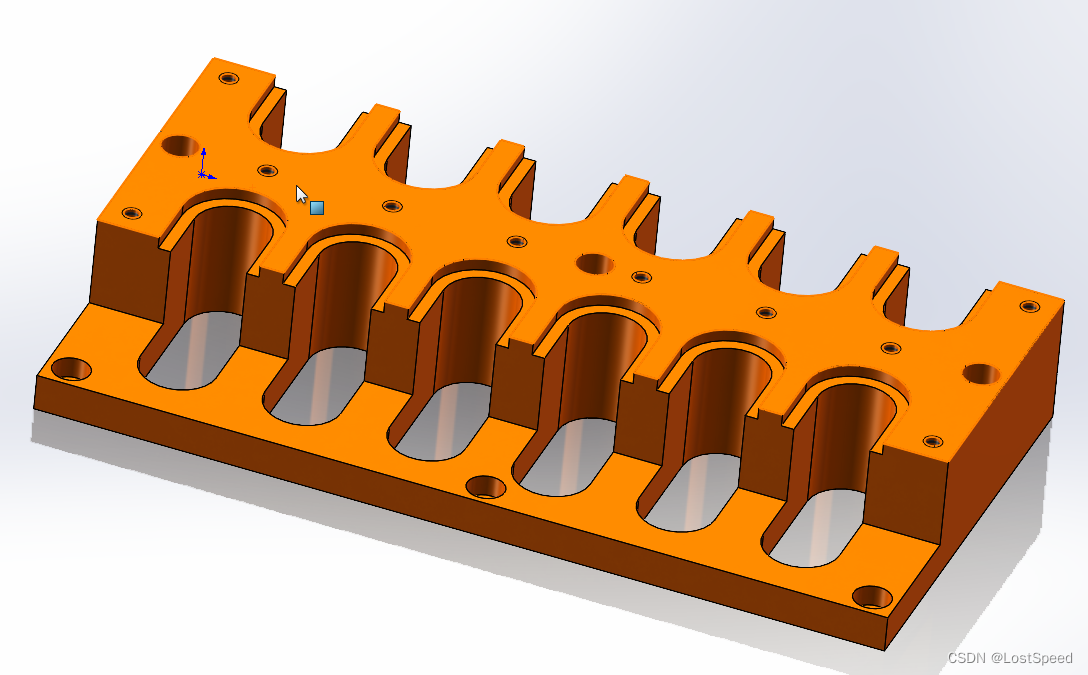
吸嘴座主体和磁铁版的并无不同, 材料为6061.
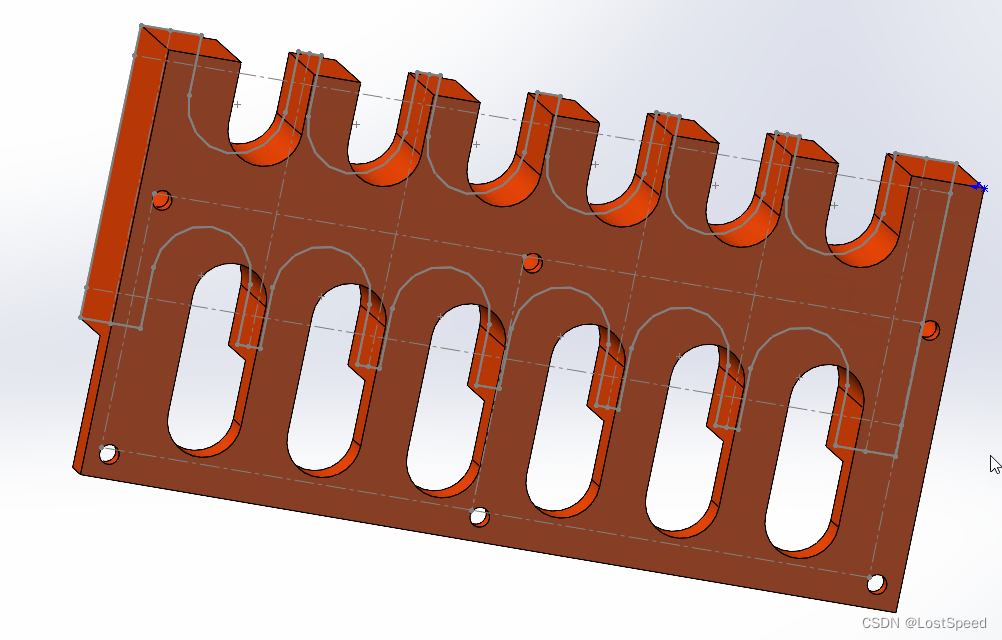
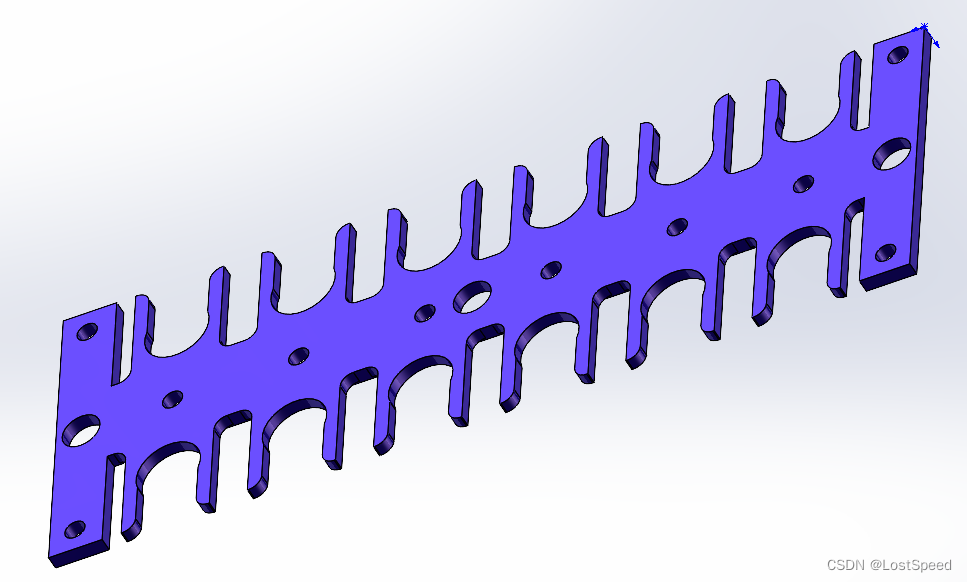
拔吸嘴时的受力挡板
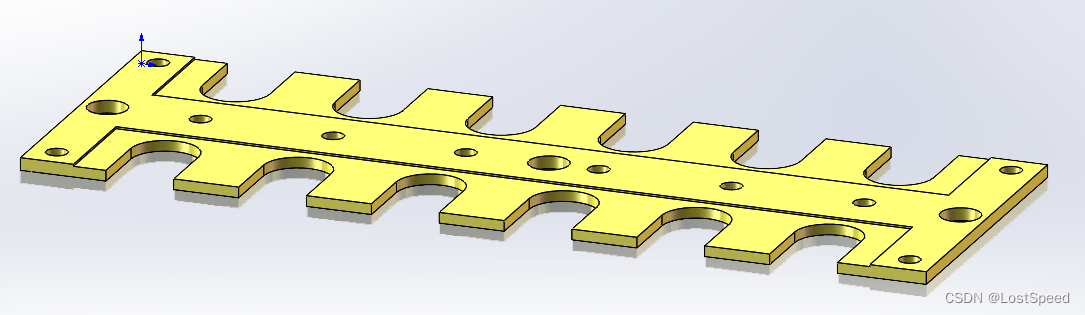
开源资料上都是3D打印的, 但是为了能用的久一点. 这里采用了304不锈钢. 初步询价, 做一个80RMB. 挺贵的.
在放吸嘴的位置, 向下挖了0.3mm的一大片区域, 是为了让上面的抱手层能自由活动.
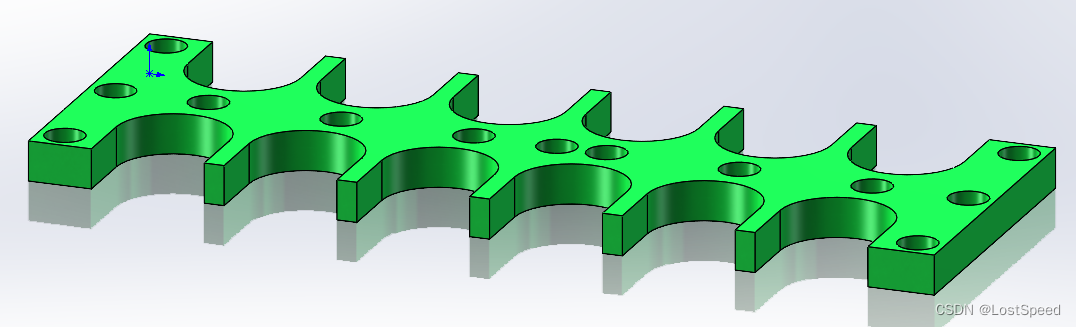
抱轴层
这个零件, 因为不太确定抱手是否能在吸嘴靠入时, 灵活的带一定韧性的接纳吸嘴轴, 我做了3个材料(3201PA-F, 8001半透明, 8228)的版本, 等回来试试. 本来想再做一个8001透明的试试, 一看比8001半透明贵了太多. 算了.

抱轴层上面, 在吸嘴停靠处挖了0.3mm的一片区域, 是为了让抱手自由的活动.
抱轴层下面是平的, 是由下面的零件(拔吸嘴时的受力挡板)挖空了0.3mm的抱手区域, 让抱手能自由活动.
单个吸嘴轴的抱手的设计如下:
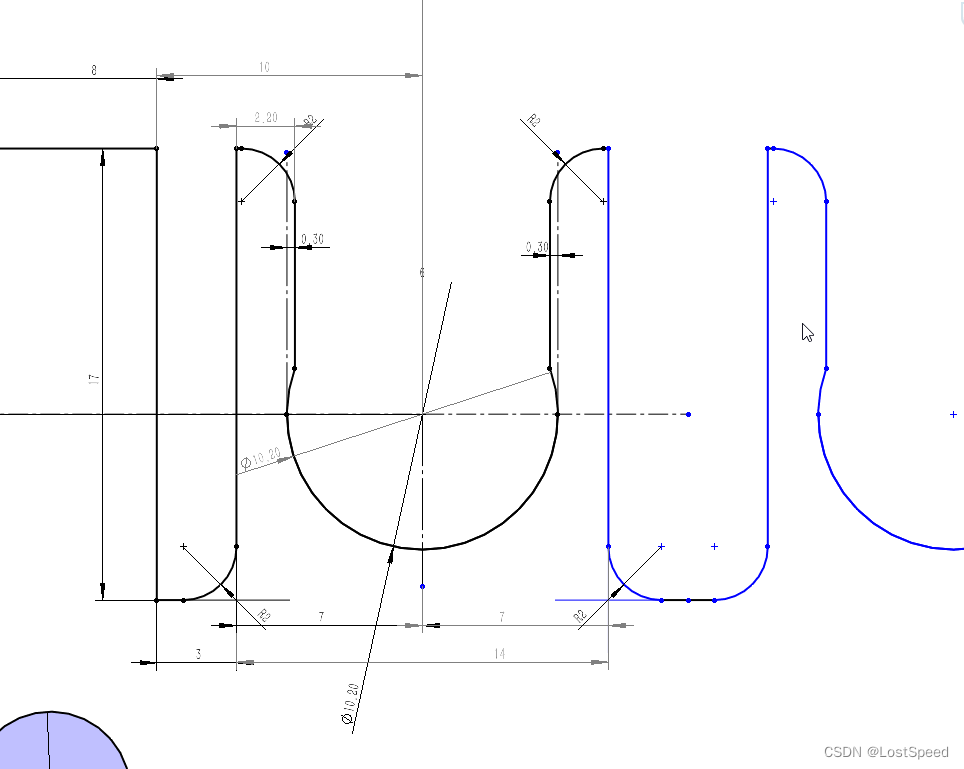
让2个抱手的间距比吸嘴轴直径, 一边小一点. 开源资料上, 一边小了0.6mm. 我这里改为了一边小0.3mm.
只要保证吸嘴不会因为设备的震动或者其他轻微外力, 从抱手轴中心移动出去就行. 用抱手来保证吸嘴在停靠位置的坐标不变.
上盖
上盖跟磁铁版的并无不同.上下都是平的.
备注
和同学讨论时, 他说其实吸嘴库的设计大概齐就行, 重点不在这里. 为了保证换吸嘴时的成功率, 应该改进N1/N2上带的吸嘴座子.
现在市面上只有一种通用的吸嘴座子(黄铜中空圆柱[外部带环形槽] + 3个滚珠 + 橡胶固定圆环).
刚开始玩, 没弄这么深入, 以后如果遇到换吸嘴的成功率问题, 再研究实验.
不过, 看开源的资料, 好像都没提到换吸嘴的成功率问题.
感觉, 只要设备稳, 自动换刀初始化时工作做的精细, 保证对刀的坐标(X, Y, Z), 同时吸嘴库停靠位置的吸嘴坐标不变, 理论上就是可以保证换刀会成功的.