最近在计算法线的时候发现法线的结果偏差很大,经过分析得到在计算点云协方差矩阵时,选择不同的方法会导致不同的结果。下面是测试过程:
1、测试点云
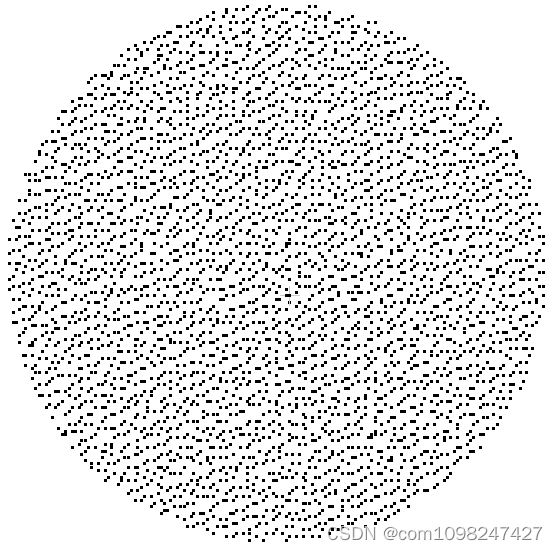
点云是中间一点的邻域点,是从上往下看,法线的方向近似为(0,0,1)也就是沿着Z轴方向。
第一种方法:按照公式计算
1、先计算中心点
pcl::compute3DCentroid(*cloud, centroid);
4.26244
-9.52218
7.24367
1
2、计算去中心化的点云
pcl::demeanPointCloud(*cloud, centroid, cloud_demean);
3、计算协方差矩阵
covariance_matrix = static_cast<Eigen::Matrix3f> (cloud_demean.topRows<3>() * cloud_demean.topRows<3>().transpose());
1.56941 0.00116825 0.00467487
0.00116825 1.57477 0.00205587
0.00467487 0.00205587 0.000789469
4、特征向量
Eigen::SelfAdjointEigenSolver<Eigen::Matrix3f> evd(covariance_matrix);
0.000772649
1.56918
1.57502
-0.00297917 -0.978679 0.205372
-0.0013039 0.205377 0.978682
0.999995 -0.00264787 0.00188798
注:以上的协方差矩阵并没有除以数据的个数n,下面为除以n的结果
covariance_matrix /= cloud->size();
0.00039853 2.9666e-07 1.18712e-06
2.9666e-07 0.000399891 5.22061e-07
1.18712e-06 5.22061e-07 2.00475e-07
相应的特征值和特征向量
evd.compute(covariance_matrix);
1.96266e-07
0.000398471
0.000399955
-0.00297925 -0.97868 0.205369
-0.00130392 0.205373 0.978683
0.999995 -0.00264789 0.00188795
可以看出两者获取的特征向量是相同的,由于计算误差的问题,导致小数点后四五位后有差异,可以接受。
第二种方法:对公式进行化简
计算代码如下:
for (size_t i = 0; i < point_count; ++i)
{
accu[0] += cloud[i].x * cloud[i].x;
accu[1] += cloud[i].x * cloud[i].y;
accu[2] += cloud[i].x * cloud[i].z;
accu[3] += cloud[i].y * cloud[i].y; // 4
accu[4] += cloud[i].y * cloud[i].z; // 5
accu[5] += cloud[i].z * cloud[i].z; // 8
accu[6] += cloud[i].x;
accu[7] += cloud[i].y;
accu[8] += cloud[i].z;
}
centroid[0] = accu[6]; centroid[1] = accu[7]; centroid[2] = accu[8];
centroid[3] = 1;
covariance_matrix.coeffRef(0) = accu[0] - accu[6] * accu[6];
covariance_matrix.coeffRef(1) = accu[1] - accu[6] * accu[7];
covariance_matrix.coeffRef(2) = accu[2] - accu[6] * accu[8];
covariance_matrix.coeffRef(4) = accu[3] - accu[7] * accu[7];
covariance_matrix.coeffRef(5) = accu[4] - accu[7] * accu[8];
covariance_matrix.coeffRef(8) = accu[5] - accu[8] * accu[8];
covariance_matrix.coeffRef(3) = covariance_matrix.coeff(1);
covariance_matrix.coeffRef(6) = covariance_matrix.coeff(2);
covariance_matrix.coeffRef(7) = covariance_matrix.coeff(5);
可以确定这里的计算方法是没有问题的。根据公式可以得到,此方法计算得到的是除以数据n的结果
pcl::computeMeanAndCovarianceMatrix(*cloud, covariance_matrix1, centroid1);
0.000402451 6.10352e-05 -0.000331879
6.10352e-05 9.91821e-05 0.000862122
-0.000331879 0.000862122 -0.00104523
计算特征值和特征向量
Eigen::SelfAdjointEigenSolver<Eigen::Matrix3f> evd1(covariance_matrix1);
-0.00156048
0.000393528
0.000623361
0.161933 0.843809 0.511628
-0.459571 0.5233 -0.717601
0.873254 0.118926 -0.47253
从以上结果可以看出,这里的结果明显是有问题的,对称矩阵的特征值都是正的。
下面将数据换成double类型进行测试:
Eigen::SelfAdjointEigenSolver<Eigen::Matrix3d> evd1(covariance_matrix1);
协方差:
0.000398508 2.87849e-07 1.166e-06
2.87849e-07 0.000399546 4.86634e-07
1.166e-06 4.86634e-07 4.04394e-08
特征值:
3.64367e-08
0.000398436
0.000399622
特征向量:
0.00292528 0.96767 0.252203
0.00121596 -0.252208 0.967672
-0.999995 0.00252404 0.00191443
可以看出,以上结果是正确的。
总结:
分析产生以上结果的原因:float类型在计算平方时,由于有效数字较少,当平方很大时,小数点后面的部分就被忽略,造成除以n之后的结果变得精度不够。
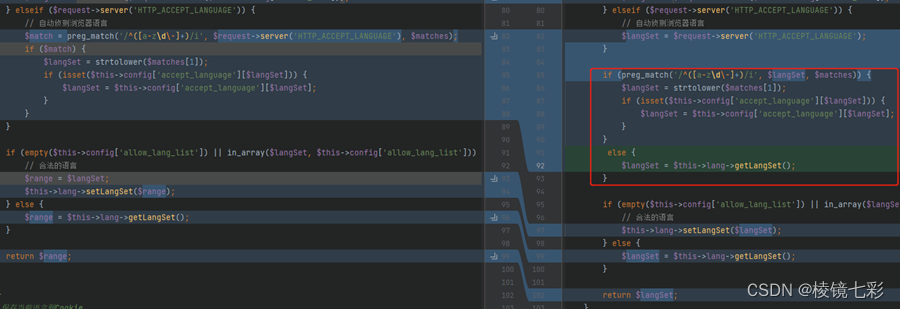
逐步对比float和double两个类型的计算结果
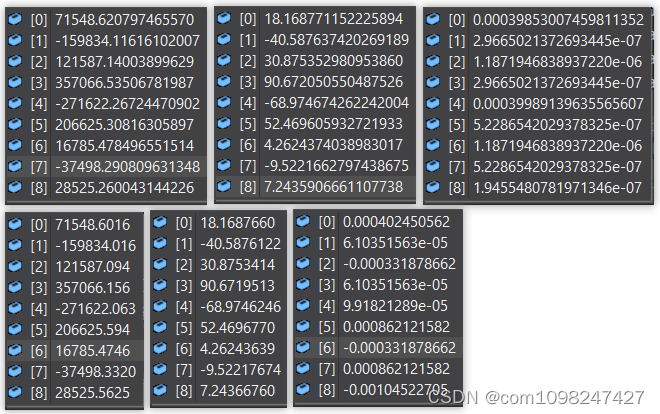
上侧为double,下侧为float
之所以产生这样的结果,是由于未中心化的点云数据坐标值较大,直接进行平方运算数值就会变得很大,由于float的有效数字9位,
4.26249981的平方,
double计算结果:18.168904623985327
float计算结果:18.1689053
这些一点点的差异最终就会造成结果造成很大的误差。
由于方法一只有一次乘法,相对而言计算结果会好点。
pcl协方差计算中有介绍
/** \brief Compute the normalized 3x3 covariance matrix and the centroid of a given set of points in a single loop.
* Normalized means that every entry has been divided by the number of entries in indices.
* For small number of points, or if you want explicitely the sample-variance, scale the covariance matrix
* with n / (n-1), where n is the number of points used to calculate the covariance matrix and is returned by this function.
* \note ***This method is theoretically exact. However using float for internal calculations reduces the accuracy but increases the efficiency.***
* \param[in] cloud the input point cloud
* \param[out] covariance_matrix the resultant 3x3 covariance matrix
* \param[out] centroid the centroid of the set of points in the cloud
* \return number of valid point used to determine the covariance matrix.
* In case of dense point clouds, this is the same as the size of input cloud.
* \ingroup common
*/
其中说明了:这个方法理论上是准确的。然而,使用浮点数进行内部计算降低了精度,但提高了效率。
注意:PCL法线估计方法,使用的就是方法二,导致计算结果偏差很大。怎么改进呢?
修改如下代码:
inline bool
computePointNormal(const pcl::PointCloud<PointInT> &cloud, const std::vector<int> &indices,
float &nx, float &ny, float &nz, float &curvature)
{
if (indices.size() < 3 ||
compute3DCentroid(cloud, indices, xyz_centroid_) == 0||
computeCovarianceMatrix(cloud, indices, xyz_centroid_, covariance_matrix_)==0)
{
nx = ny = nz = curvature = std::numeric_limits<float>::quiet_NaN();
return false;
}
// Get the plane normal and surface curvature
solvePlaneParameters(covariance_matrix_, nx, ny, nz, curvature);
return true;
}
先计算中心点,然后计算协方差。
这样修改后,计算的结果是正确的。








![[附源码]Python计算机毕业设计SSM基于的冠状病毒疫情防控资讯交流推荐网站(程序+LW)](https://img-blog.csdnimg.cn/c8f24948235b44859154bbbf041279dd.png)