IIC
RT-Thread IIC 应用编程
2.驱动分析
IIC总线设备继承自io设备驱动框架,RTT对IIC就只有2层的封装
IIC设备总线,在RTT内部有软件IIC和硬件IIC
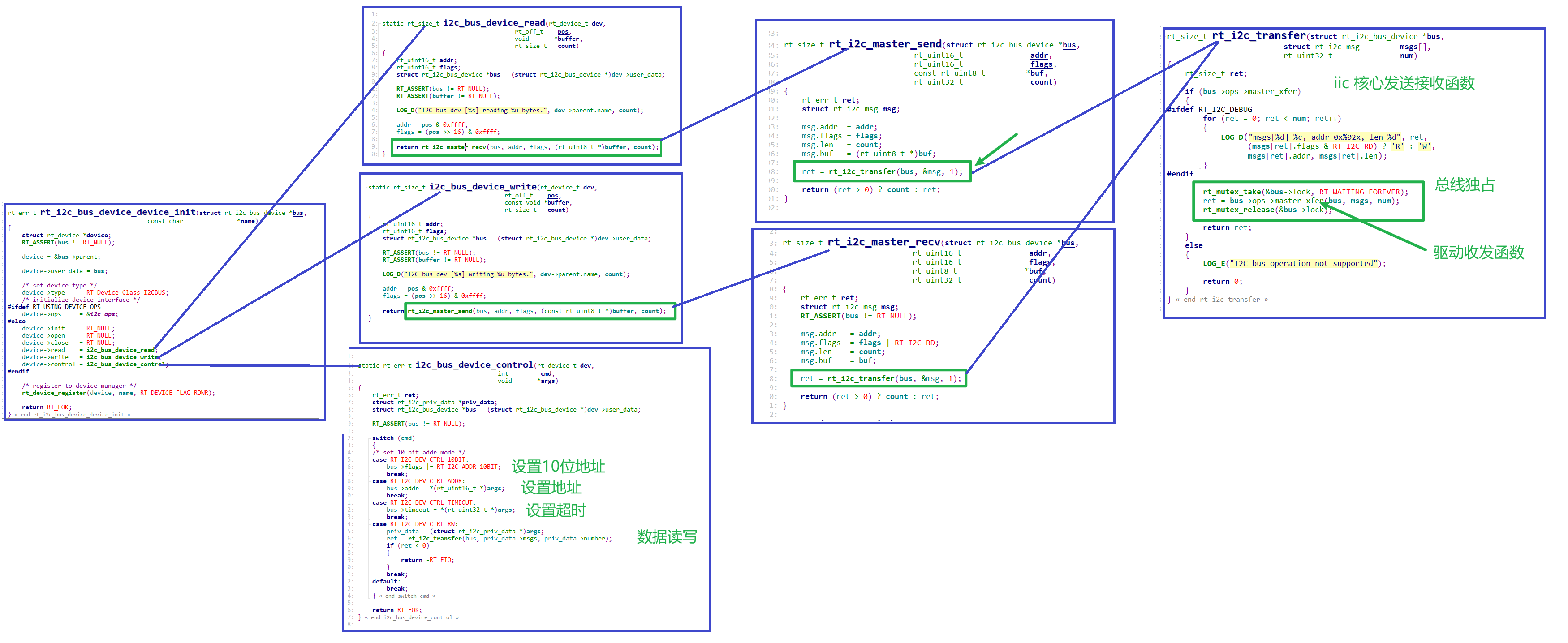
设备驱动注册
rt_err_t rt_i2c_bus_device_register(struct rt_i2c_bus_device *bus,
const char *bus_name)
iic bus 抽象模型
struct rt_i2c_bus_device
{
struct rt_device parent;//继承自设备驱动
const struct rt_i2c_bus_device_ops *ops;//iic bus 操作结构体
rt_uint16_t flags;
rt_uint16_t addr;
struct rt_mutex lock;//bus 涉及iic设备独占的问题
rt_uint32_t timeout;
rt_uint32_t retries;
void *priv;
};
iic bus 操作函数集
下边基于N32L40x 的iic驱动{软件和硬件方式}实现都仅仅实现了master_xfer 驱动函数,slave_xfer和i2c_bus_control均没有实现
struct rt_i2c_bus_device_ops
{
rt_size_t (*master_xfer)(struct rt_i2c_bus_device *bus,
struct rt_i2c_msg msgs[],
rt_uint32_t num);
rt_size_t (*slave_xfer)(struct rt_i2c_bus_device *bus,
struct rt_i2c_msg msgs[],
rt_uint32_t num);
rt_err_t (*i2c_bus_control)(struct rt_i2c_bus_device *bus,
rt_uint32_t,
rt_uint32_t);
};
接收函数
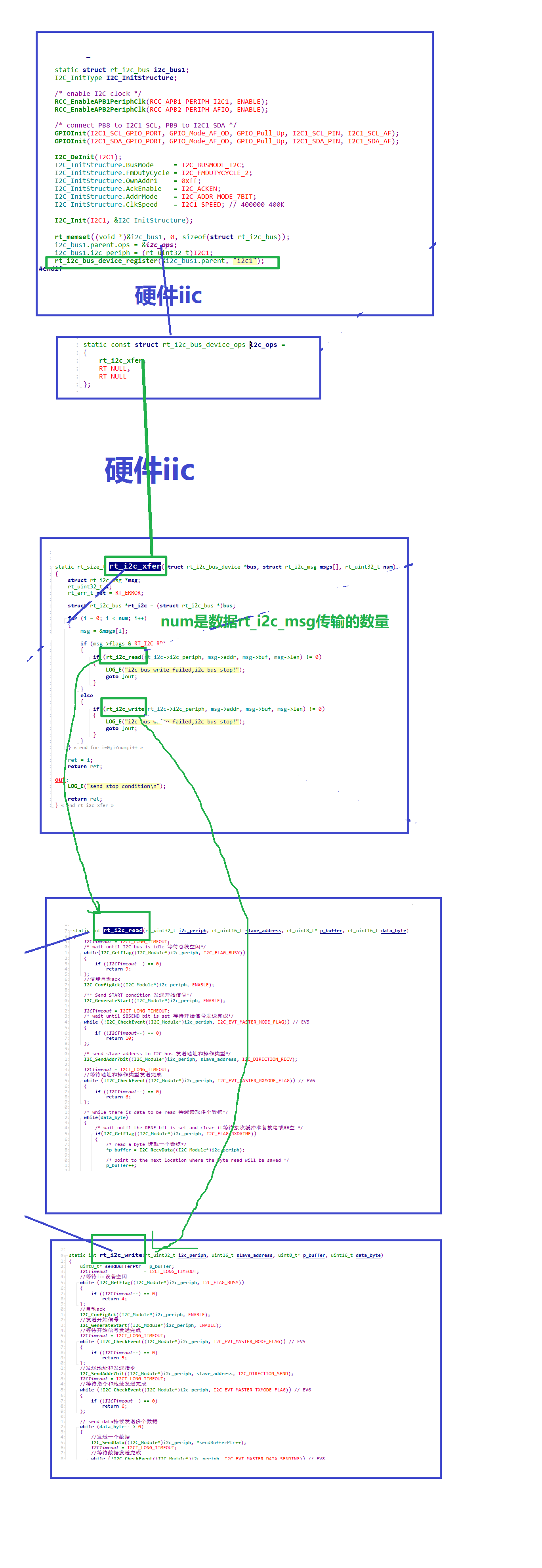
RTT 基于N32的硬件IIC实现的
static int rt_i2c_read(rt_uint32_t i2c_periph, rt_uint16_t slave_address, rt_uint8_t* p_buffer, rt_uint16_t data_byte)
{
I2CTimeout = I2CT_LONG_TIMEOUT;
/* wait until I2C bus is idle 等待总线空闲*/
while(I2C_GetFlag((I2C_Module*)i2c_periph, I2C_FLAG_BUSY))
{
if ((I2CTimeout--) == 0)
return 9;
};
//使能自动ack
I2C_ConfigAck((I2C_Module*)i2c_periph, ENABLE);
/** Send START condition 发送开始信号*/
I2C_GenerateStart((I2C_Module*)i2c_periph, ENABLE);
I2CTimeout = I2CT_LONG_TIMEOUT;
/* wait until SBSEND bit is set 等待开始信号发送完成*/
while (!I2C_CheckEvent((I2C_Module*)i2c_periph, I2C_EVT_MASTER_MODE_FLAG)) // EV5
{
if ((I2CTimeout--) == 0)
return 10;
};
/* send slave address to I2C bus 发送地址和操作类型*/
I2C_SendAddr7bit((I2C_Module*)i2c_periph, slave_address, I2C_DIRECTION_RECV);
I2CTimeout = I2CT_LONG_TIMEOUT;
//等待地址和操作类型发送完成
while (!I2C_CheckEvent((I2C_Module*)i2c_periph, I2C_EVT_MASTER_RXMODE_FLAG)) // EV6
{
if ((I2CTimeout--) == 0)
return 6;
};
/* while there is data to be read 持续读取多个数据*/
while(data_byte)
{
/* wait until the RBNE bit is set and clear it等待接收缓冲准备就绪或非空 */
if(I2C_GetFlag((I2C_Module*)i2c_periph, I2C_FLAG_RXDATNE))
{
/* read a byte 读取一个数据*/
*p_buffer = I2C_RecvData((I2C_Module*)i2c_periph);
/* point to the next location where the byte read will be saved */
p_buffer++;
/* decrement the read bytes counter */
data_byte--;
if(1 == data_byte)
{
/* disable acknowledge 最后一个数据不在自动产生ack*/
I2C_ConfigAck((I2C_Module*)i2c_periph, DISABLE);
/* send a stop condition to I2C bus 最后一个数据接收后自动产生停止信号*/
I2C_GenerateStop((I2C_Module*)i2c_periph, ENABLE);
}
}
}
/* wait until the stop condition is finished等待停止信号发送完成 */
while(I2C_GetFlag((I2C_Module*)i2c_periph, I2C_FLAG_STOPF))
{
if ((I2CTimeout--) == 0)
return 7;
};
/* enable acknowledge 使能自动ack*/
I2C_ConfigAck((I2C_Module*)i2c_periph, ENABLE);
I2C_ConfigNackLocation((I2C_Module*)i2c_periph,I2C_NACK_POS_CURRENT);
return 0;
}
发送函数
static int rt_i2c_write(rt_uint32_t i2c_periph, uint16_t slave_address, uint8_t* p_buffer, uint16_t data_byte)
{
uint8_t* sendBufferPtr = p_buffer;
I2CTimeout = I2CT_LONG_TIMEOUT;
//等待iic设备空闲
while (I2C_GetFlag((I2C_Module*)i2c_periph, I2C_FLAG_BUSY))
{
if ((I2CTimeout--) == 0)
return 4;
};
//自动ack
I2C_ConfigAck((I2C_Module*)i2c_periph, ENABLE);
//发送开始信号
I2C_GenerateStart((I2C_Module*)i2c_periph, ENABLE);
//等待开始信号发送完成
I2CTimeout = I2CT_LONG_TIMEOUT;
while (!I2C_CheckEvent((I2C_Module*)i2c_periph, I2C_EVT_MASTER_MODE_FLAG)) // EV5
{
if ((I2CTimeout--) == 0)
return 5;
};
//发送地址和发送指令
I2C_SendAddr7bit((I2C_Module*)i2c_periph, slave_address, I2C_DIRECTION_SEND);
I2CTimeout = I2CT_LONG_TIMEOUT;
//等待指令和地址发送完成
while (!I2C_CheckEvent((I2C_Module*)i2c_periph, I2C_EVT_MASTER_TXMODE_FLAG)) // EV6
{
if ((I2CTimeout--) == 0)
return 6;
};
// send data持续发送多个数据
while (data_byte-- > 0)
{
//发送一个数据
I2C_SendData((I2C_Module*)i2c_periph, *sendBufferPtr++);
I2CTimeout = I2CT_LONG_TIMEOUT;
//等待数据发送完成
while (!I2C_CheckEvent((I2C_Module*)i2c_periph, I2C_EVT_MASTER_DATA_SENDING)) // EV8
{
if ((I2CTimeout--) == 0)
return 7;
};
};
//等待数据发送完成
I2CTimeout = I2CT_LONG_TIMEOUT;
while (!I2C_CheckEvent((I2C_Module*)i2c_periph, I2C_EVT_MASTER_DATA_SENDED)) // EV8-2
{
if ((I2CTimeout--) == 0)
return 8;
};
//产生一个停止信号
I2C_GenerateStop((I2C_Module*)i2c_periph, ENABLE);
return 0;
}
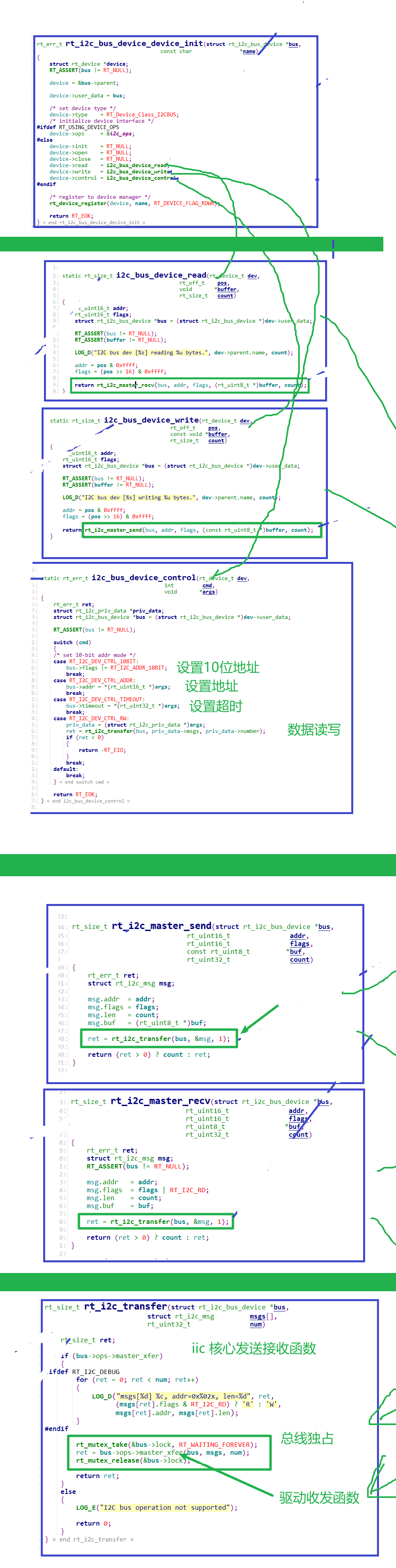
iic总线设备驱动分析
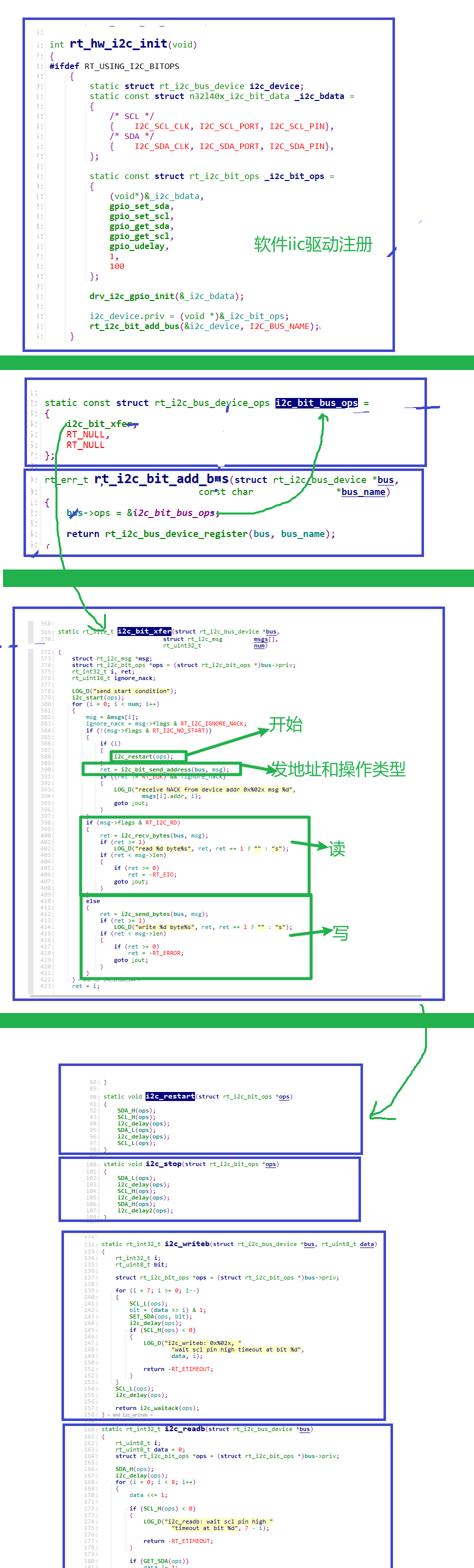
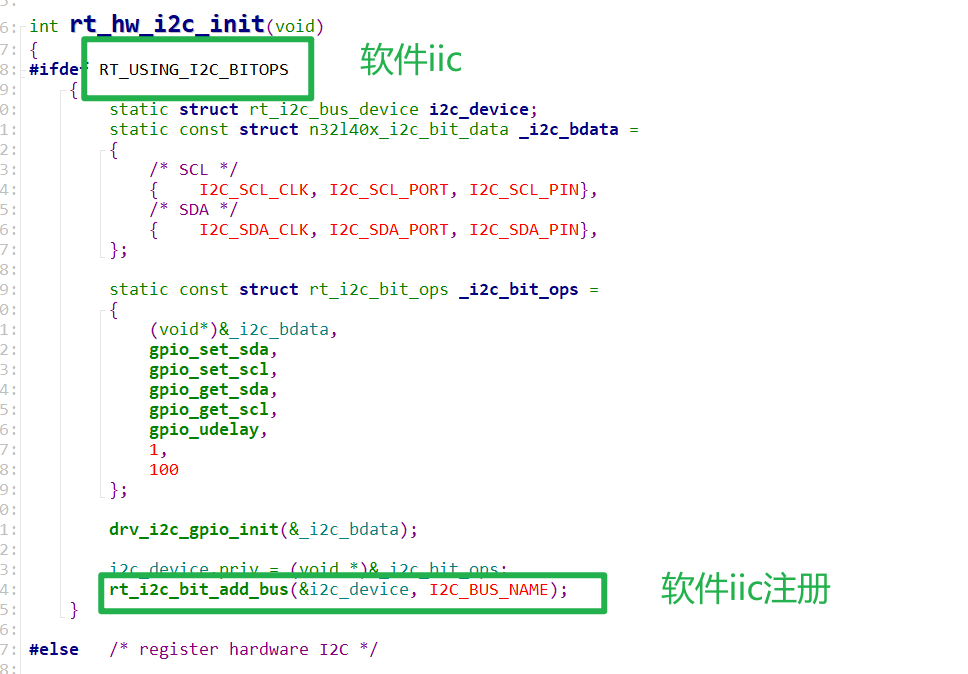
软件IIC驱动实现与注册
硬件IIC驱动实现与注册
RTT封装的IIC驱动框架调用流程
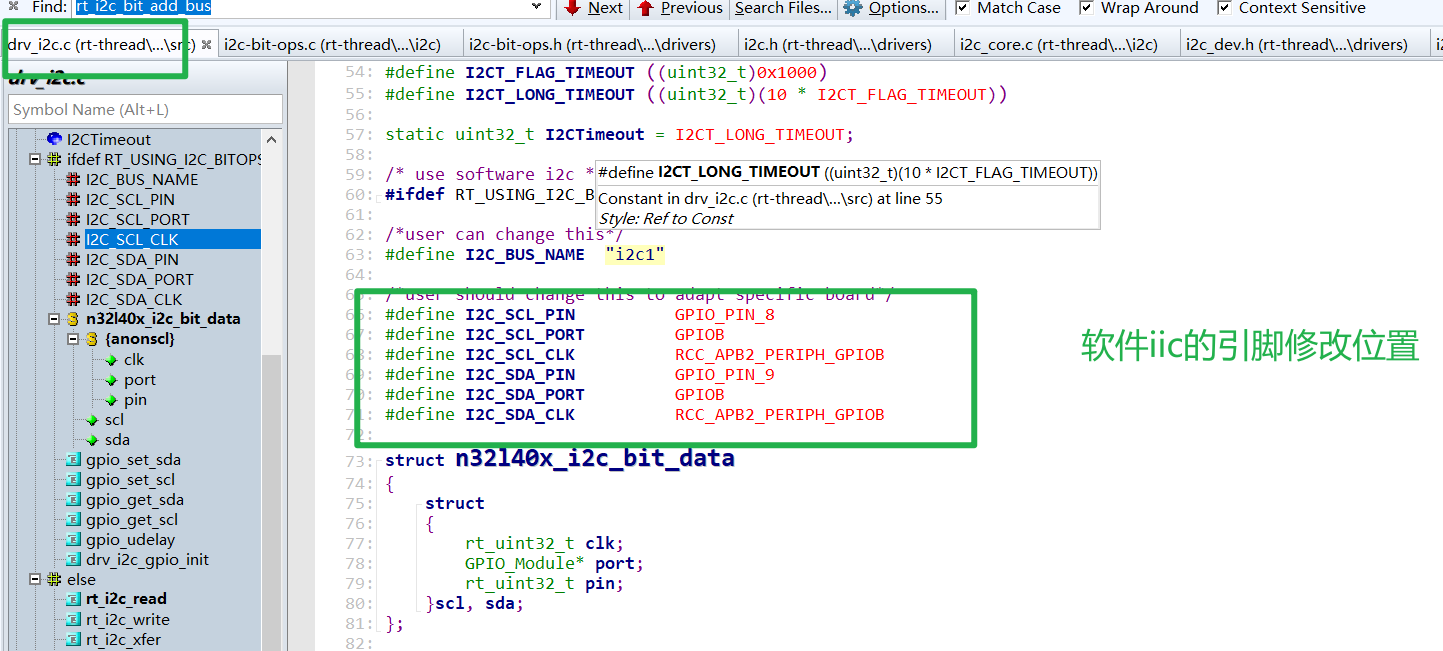
软件模式iic设备总线引脚更改
在drv_ic.c文件中更改
软件iic注册
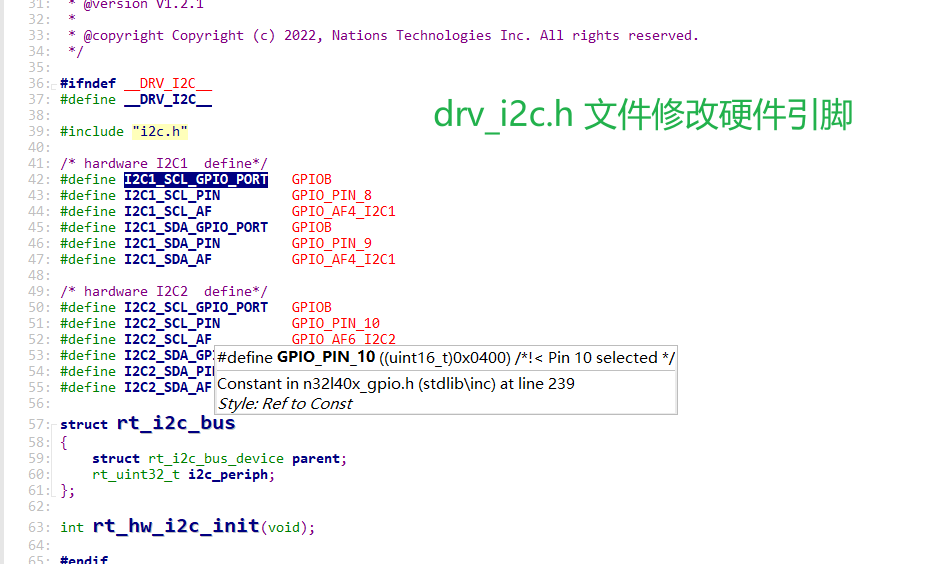
硬件iic总线设备引脚修改
iic总线的使用
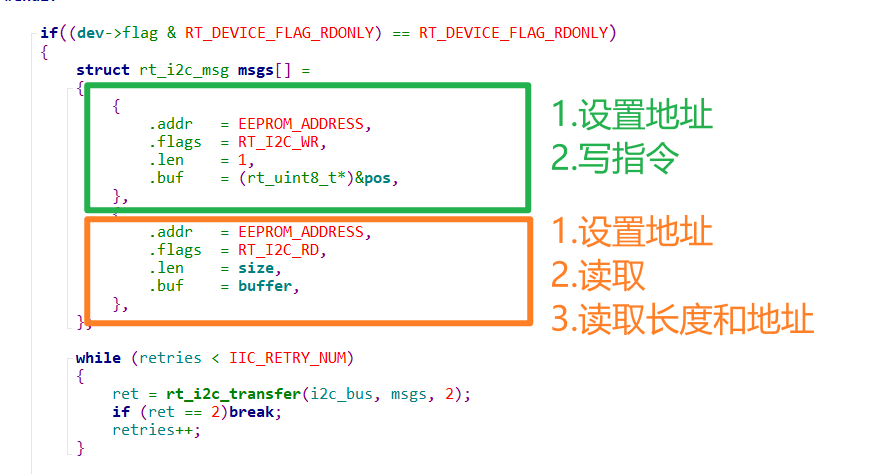
- 定义eeprom读函数-驱动内部会每个数据包会重新 发起开始和停止信号
/* SPI Dev device interface, compatible with RT-Thread 0.3.x/1.0.x */
static rt_size_t rt_eeprom_read(rt_device_t dev,
rt_off_t pos,
void *buffer,
rt_size_t size)
{
static struct rt_i2c_bus_device *i2c_bus;
int ret = 0;
int retries = 0;
#if defined(RT_USING_I2C1)
i2c_bus = rt_i2c_bus_device_find("i2c1");
#endif
#if defined(RT_USING_I2C2)
i2c_bus = rt_i2c_bus_device_find("i2c2");
#endif
if((dev->flag & RT_DEVICE_FLAG_RDONLY) == RT_DEVICE_FLAG_RDONLY)
{
struct rt_i2c_msg msgs[] =
{
{
.addr = EEPROM_ADDRESS,
.flags = RT_I2C_WR,
.len = 1,
.buf = (rt_uint8_t*)&pos,
},
{
.addr = EEPROM_ADDRESS,
.flags = RT_I2C_RD,
.len = size,
.buf = buffer,
},
};
while (retries < IIC_RETRY_NUM)
{
ret = rt_i2c_transfer(i2c_bus, msgs, 2);
if (ret == 2)break;
retries++;
}
if (retries >= IIC_RETRY_NUM)
{
rt_kprintf("%s i2c read error: %d", __func__, ret);
return 0;
}
return ret;
}
else
{
return 0;
}
}
-
定义eeprom写函数
static rt_size_t rt_eeprom_write(rt_device_t dev, rt_off_t pos, const void *buffer, rt_size_t size) { static struct rt_i2c_bus_device *i2c_bus; #if defined(RT_USING_I2C1) i2c_bus = rt_i2c_bus_device_find("i2c1"); #endif #if defined(RT_USING_I2C2) i2c_bus = rt_i2c_bus_device_find("i2c2"); #endif if((dev->flag & RT_DEVICE_FLAG_RDONLY) == RT_DEVICE_FLAG_RDONLY) { I2C_EE_WriteBuffer(i2c_bus, (uint8_t*)buffer, pos, size); return size; } else { return 0; } } -
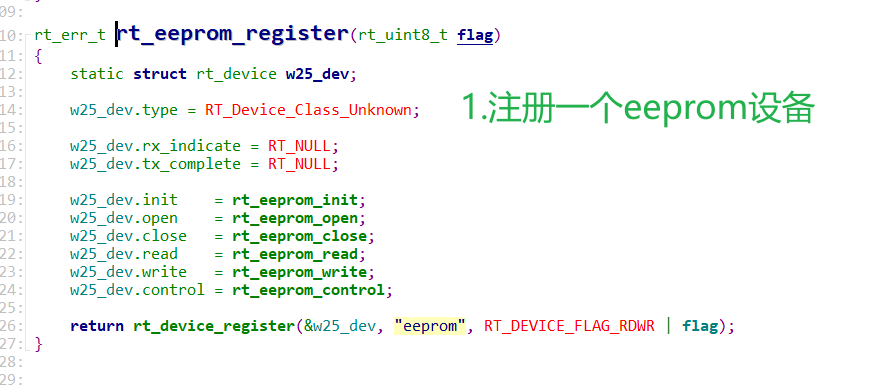
注册一个eeprom
eeprom 使用IIC示例
AT24C02
-
8个字节每页,累计32个页
-
通讯频率MAX = 400K
-
AT24C02大小 2K
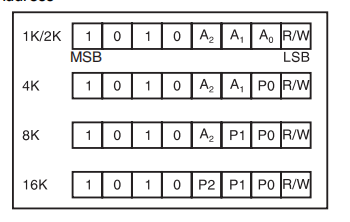
- 芯片地址
-
写时序
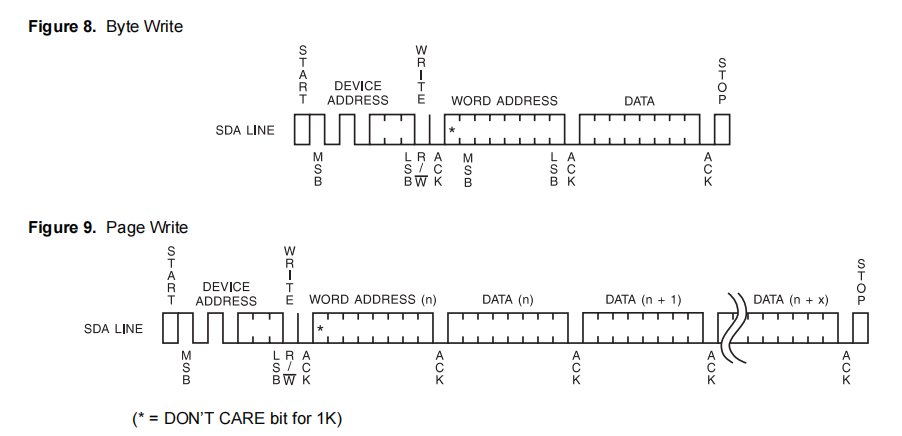
-
读时序
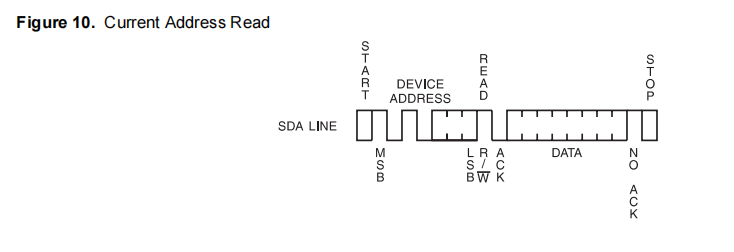
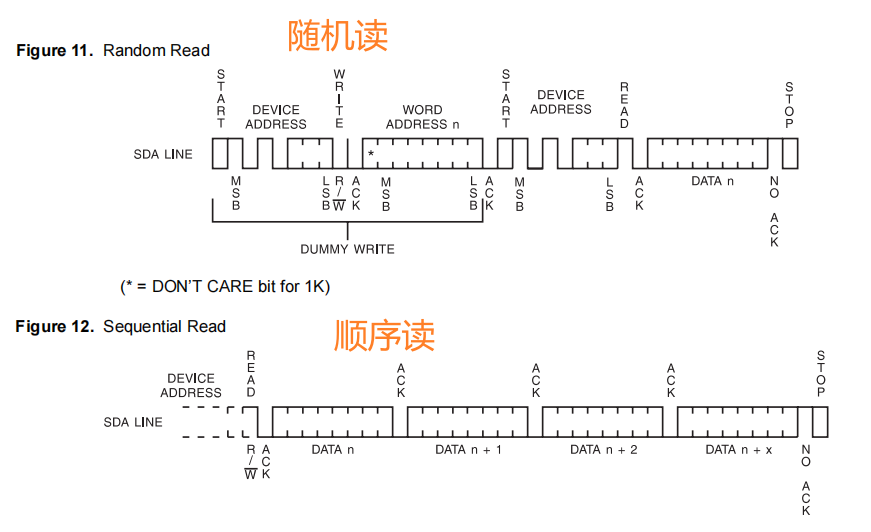
eeprom_at24c02.h
/*****************************************************************************
* Copyright (c) 2022, Nations Technologies Inc.
*
* All rights reserved.
* ****************************************************************************
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions are met:
*
* - Redistributions of source code must retain the above copyright notice,
* this list of conditions and the disclaimer below.
*
* Nations' name may not be used to endorse or promote products derived from
* this software without specific prior written permission.
*
* DISCLAIMER: THIS SOFTWARE IS PROVIDED BY NATIONS "AS IS" AND ANY EXPRESS OR
* IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF
* MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NON-INFRINGEMENT ARE
* DISCLAIMED. IN NO EVENT SHALL NATIONS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA,
* OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF
* LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING
* NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* ****************************************************************************/
/**
* @file i2c_eeprom.h
* @author Nations
* @version V1.2.1
*
* @copyright Copyright (c) 2022, Nations Technologies Inc. All rights reserved.
*/
#ifndef __I2C_EEPROM_H__
#define __I2C_EEPROM_H__
#include <rtthread.h>
#include "n32l40x.h"
#include <stdio.h>
#include "i2c.h"
typedef enum i2c_state
{
COMM_DONE = 0, /// done successfully
COMM_PRE = 1,
COMM_IN_PROCESS = 2,
COMM_EXIT = 3 /// exit since failure
} I2C_STATE;
typedef enum i2c_direction
{
Transmitter = 0x00,
Receiver = 0x01
} I2C_DIRECTION;
/**
* PROCESS MODE
* 0=polling
* 1=interrupt
* 2=DMA
*/
#define PROCESS_MODE 0
#define TEST_EEPROM_SIZE 256
#define TEST_EEPROM_ADDR 0x00
#define I2C_Speed 400000
#define EEPROM_ADDRESS 0xA0
#define I2C_PageSize 8 /// eeprom IC type AT24C08
#define sEE_FLAG_TIMEOUT ((uint32_t)0x1000)
#define sEE_LONG_TIMEOUT ((uint32_t)(100 * sEE_FLAG_TIMEOUT))
#define IIC_RETRY_NUM 2
/** Maximum number of trials for sEE_WaitEepromStandbyState() function */
#define sEE_MAX_TRIALS_NUMBER 150
#define FALSE 0
#define TRUE 1
void I2C_EE_Init(void);
void I2C_EE_WriteBuffer(struct rt_i2c_bus_device *i2c_bus, u8* pBuffer, u16 WriteAddr, u16 NumByteToWrite);
void I2C_EE_WriteOnePage(struct rt_i2c_bus_device *i2c_bus, u8* pBuffer, u16 WriteAddr, u16 NumByteToWrite);
void I2C_EE_PageWrite(struct rt_i2c_bus_device *bus, u8* pBuffer, u16 WriteAddr, u16 NumByteToWrite);
void I2C_EE_WriteOnePageCompleted(void);
void I2C_EE_WaitOperationIsCompleted(void);
void I2C_EE_WaitEepromStandbyState(struct rt_i2c_bus_device *i2c_bus);
void i2c1_evt_handle(void);
void i2c1_err_handle(void);
void i2c1_send_dma_handle(void);
void i2c1_receive_dma_handle(void);
rt_err_t rt_eeprom_register(rt_uint8_t flag);
#endif /* __I2C_EEPROM_H__ */
eeprom_at24c02 .c
/*****************************************************************************
* Copyright (c) 2022, Nations Technologies Inc.
*
* All rights reserved.
* ****************************************************************************
*
* Redistribution and use in source and binary forms, with or without
* modification, are permitted provided that the following conditions are met:
*
* - Redistributions of source code must retain the above copyright notice,
* this list of conditions and the disclaimer below.
*
* Nations' name may not be used to endorse or promote products derived from
* this software without specific prior written permission.
*
* DISCLAIMER: THIS SOFTWARE IS PROVIDED BY NATIONS "AS IS" AND ANY EXPRESS OR
* IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES OF
* MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE AND NON-INFRINGEMENT ARE
* DISCLAIMED. IN NO EVENT SHALL NATIONS BE LIABLE FOR ANY DIRECT, INDIRECT,
* INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
* LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE, DATA,
* OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY THEORY OF
* LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT (INCLUDING
* NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE OF THIS SOFTWARE,
* EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
* ****************************************************************************/
/**
* @file i2c_eeprom.c
* @author Nations
* @version V1.2.1
*
* @copyright Copyright (c) 2022, Nations Technologies Inc. All rights reserved.
*/
/**
* @file i2c_eeprom.c
* @author Nations
* @version V1.2.1
*
* @copyright Copyright (c) 2022, Nations Technologies Inc. All rights reserved.
*/
#include <rtthread.h>
#include "n32l40x.h"
#include "n32l40x_dma.h"
#include "i2c_eeprom.h"
#include "string.h"
#include "stdbool.h"
#include "i2c.h"
#include "drv_i2c.h"
/** @addtogroup I2C_EEPROM
* @{
*/
/* when EEPROM is writing data inside,it won't response the request from the master.check the ack,
if EEPROM response,make clear that EEPROM finished the last data-writing,allow the next operation */
static bool check_begin = FALSE;
static bool OffsetDone = FALSE;
u32 sEETimeout = sEE_LONG_TIMEOUT;
static u8 MasterDirection = Transmitter;
static u16 SlaveADDR;
static u16 DeviceOffset = 0x0;
u16 I2C_NumByteToWrite = 0;
u8 I2C_NumByteWritingNow = 0;
u8* I2C_pBuffer = 0;
u16 I2C_WriteAddr = 0;
static u8 SendBuf[8] = {0};
static u16 BufCount = 0;
static u16 Int_NumByteToWrite = 0;
static u16 Int_NumByteToRead = 0;
/* global state variable i2c_comm_state */
volatile I2C_STATE i2c_comm_state;
/**
* @brief Timeout callback used by the I2C EEPROM driver.
*/
u8 sEE_TIMEOUT_UserCallback(void)
{
rt_kprintf("error!!!\r\n");
/* Block communication and all processes */
while (1)
{
}
}
/**
* @brief Writes buffer of data to the I2C EEPROM.
* @param pBuffer pointer to the buffer containing the data to be
* written to the EEPROM.
* @param WriteAddr EEPROM's internal address to write to.
* @param NumByteToWrite number of bytes to write to the EEPROM.
*/
void I2C_EE_WriteBuffer(struct rt_i2c_bus_device *i2c_bus, u8* pBuffer, u16 WriteAddr, u16 NumByteToWrite)
{
struct rt_i2c_bus *rt_i2c = (struct rt_i2c_bus *)i2c_bus;
if (I2C_GetFlag((I2C_Module*)(rt_i2c->i2c_periph), I2C_FLAG_BUSY))
{
return;
}
I2C_pBuffer = pBuffer;
I2C_WriteAddr = WriteAddr;
I2C_NumByteToWrite = NumByteToWrite;
while (I2C_NumByteToWrite > 0)
{
I2C_EE_WriteOnePage(i2c_bus, I2C_pBuffer, I2C_WriteAddr, I2C_NumByteToWrite);
I2C_EE_WaitEepromStandbyState(i2c_bus);
I2C_EE_WriteOnePageCompleted();
}
}
/**
* @brief Writes a page of data to the I2C EEPROM, general called by
* I2C_EE_WriteBuffer.
* @param pBuffer pointer to the buffer containing the data to be
* written to the EEPROM.
* @param WriteAddr EEPROM's internal address to write to.
* @param NumByteToWrite number of bytes to write to the EEPROM.
*/
void I2C_EE_WriteOnePage(struct rt_i2c_bus_device *i2c_bus, u8* pBuffer, u16 WriteAddr, u16 NumByteToWrite)
{
u8 NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0;
Addr = WriteAddr % I2C_PageSize;
count = I2C_PageSize - Addr;
NumOfPage = NumByteToWrite / I2C_PageSize;
NumOfSingle = NumByteToWrite % I2C_PageSize;
I2C_NumByteWritingNow = 0;
/** If WriteAddr is I2C_PageSize aligned */
if (Addr == 0)
{
/** If NumByteToWrite < I2C_PageSize */
if (NumOfPage == 0)
{
I2C_NumByteWritingNow = NumOfSingle;
I2C_EE_PageWrite(i2c_bus, pBuffer, WriteAddr, NumOfSingle);
}
/** If NumByteToWrite > I2C_PageSize */
else
{
I2C_NumByteWritingNow = I2C_PageSize;
I2C_EE_PageWrite(i2c_bus, pBuffer, WriteAddr, I2C_PageSize);
}
}
/** If WriteAddr is not I2C_PageSize aligned */
else
{
/* If NumByteToWrite < I2C_PageSize */
if (NumOfPage == 0)
{
I2C_NumByteWritingNow = NumOfSingle;
I2C_EE_PageWrite(i2c_bus, pBuffer, WriteAddr, NumOfSingle);
}
/* If NumByteToWrite > I2C_PageSize */
else
{
if (count != 0)
{
I2C_NumByteWritingNow = count;
I2C_EE_PageWrite(i2c_bus, pBuffer, WriteAddr, count);
}
}
}
}
/**
* @brief Writes more than one byte to the EEPROM with a single WRITE
* cycle. The number of byte can't exceed the EEPROM page size.
* @param pBuffer pointer to the buffer containing the data to be
* written to the EEPROM.
* @param WriteAddr EEPROM's internal address to write to (1-16).
* @param NumByteToWrite number of bytes to write to the EEPROM.
*/
void I2C_EE_PageWrite(struct rt_i2c_bus_device *i2c_bus, u8* pBuffer, u16 WriteAddr, u16 NumByteToWrite)
{
rt_uint8_t data[9] = {0};
data[0] = (rt_uint8_t)WriteAddr;
if(NumByteToWrite>8)
{
NumByteToWrite = 8;
}
rt_memcpy(data+1, pBuffer, NumByteToWrite);
struct rt_i2c_msg msgs[] =
{
{
.addr = EEPROM_ADDRESS,
.flags = RT_I2C_WR,
.len = NumByteToWrite+1,
.buf = data,
},
};
rt_i2c_transfer(i2c_bus, msgs, 1);
}
/**
* @brief Process Write one page completed.
*/
void I2C_EE_WriteOnePageCompleted(void)
{
I2C_pBuffer += I2C_NumByteWritingNow;
I2C_WriteAddr += I2C_NumByteWritingNow;
I2C_NumByteToWrite -= I2C_NumByteWritingNow;
}
/**
* @brief wait operation is completed.
*/
void I2C_EE_WaitOperationIsCompleted(void)
{
sEETimeout = sEE_LONG_TIMEOUT;
while (i2c_comm_state != COMM_DONE)
{
if ((sEETimeout--) == 0)
sEE_TIMEOUT_UserCallback();
}
}
/**
* @brief I2c1 event interrupt Service Routines.
*/
void i2c1_evt_handle(void)
{
uint32_t lastevent = I2C_GetLastEvent(I2C1);
switch (lastevent)
{
/** Master Invoke */
case I2C_EVT_MASTER_MODE_FLAG: /// EV5
if (!check_begin)
{
i2c_comm_state = COMM_IN_PROCESS;
}
if (MasterDirection == Receiver)
{
if (!OffsetDone)
{
I2C_SendAddr7bit(I2C1, SlaveADDR, I2C_DIRECTION_SEND);
}
else
{
/** Send slave Address for read */
I2C_SendAddr7bit(I2C1, SlaveADDR, I2C_DIRECTION_RECV);
OffsetDone = FALSE;
}
}
else
{
/** Send slave Address for write */
I2C_SendAddr7bit(I2C1, SlaveADDR, I2C_DIRECTION_SEND);
}
break;
/** Master Receiver events */
case I2C_EVT_MASTER_RXMODE_FLAG: /// EV6
break;
case I2C_EVT_MASTER_DATA_RECVD_FLAG: /// EV7
*I2C_pBuffer = I2C_RecvData(I2C1);
I2C_pBuffer++;
Int_NumByteToRead--;
if (Int_NumByteToRead == 1)
{
/** Disable Acknowledgement */
I2C_ConfigAck(I2C1, DISABLE);
I2C_GenerateStop(I2C1, ENABLE);
}
if (Int_NumByteToRead == 0)
{
I2C_ConfigInt(I2C1, I2C_INT_EVENT | I2C_INT_BUF | I2C_INT_ERR, DISABLE);
i2c_comm_state = COMM_DONE;
}
break;
/** Master Transmitter events */
case I2C_EVT_MASTER_TXMODE_FLAG: /// EV8 just after EV6
if (check_begin)
{
check_begin = FALSE;
I2C_ConfigInt(I2C1, I2C_INT_EVENT | I2C_INT_BUF | I2C_INT_ERR, DISABLE);
I2C_GenerateStop(I2C1, ENABLE);
i2c_comm_state = COMM_DONE;
break;
}
I2C_SendData(I2C1, DeviceOffset);
OffsetDone = TRUE;
break;
case I2C_EVT_MASTER_DATA_SENDING: /// EV8 I2C_EVENT_MASTER_DATA_TRANSMITTING
if (MasterDirection == Receiver)
{
I2C_GenerateStart(I2C1, ENABLE);
}
break;
case I2C_EVT_MASTER_DATA_SENDED: /// EV8-2
if (MasterDirection == Transmitter)
{
if (Int_NumByteToWrite == 0)
{
I2C_GenerateStop(I2C1, ENABLE);
sEETimeout = sEE_LONG_TIMEOUT;
while (I2C_GetFlag(I2C1, I2C_FLAG_BUSY))
{
if ((sEETimeout--) == 0)
sEE_TIMEOUT_UserCallback();
}
check_begin = TRUE;
I2C_GenerateStart(I2C1, ENABLE);
}
else
{
I2C_SendData(I2C1, SendBuf[BufCount++]);
Int_NumByteToWrite--;
}
}
break;
}
}
/**
* @brief I2c1 error interrupt Service Routines.
*/
void i2c1_err_handle(void)
{
if (I2C_GetFlag(I2C1, I2C_FLAG_ACKFAIL))
{
if (check_begin) /// EEPROM write busy
{
I2C_GenerateStart(I2C1, ENABLE);
}
else if (I2C1->STS2 & 0x01) /// real fail
{
I2C_GenerateStop(I2C1, ENABLE);
i2c_comm_state = COMM_EXIT;
}
I2C_ClrFlag(I2C1, I2C_FLAG_ACKFAIL);
}
if (I2C_GetFlag(I2C1, I2C_FLAG_BUSERR))
{
if (I2C1->STS2 & 0x01)
{
I2C_GenerateStop(I2C1, ENABLE);
i2c_comm_state = COMM_EXIT;
}
I2C_ClrFlag(I2C1, I2C_FLAG_BUSERR);
}
}
#ifdef RT_USING_I2C_DMA
/**
* @brief I2c1 dma send interrupt Service Routines.
*/
void i2c1_send_dma_handle()
{
if (DMA_GetFlagStatus(DMA1_FLAG_TC6, DMA1))
{
if (I2Cx->STS2 & 0x01) /// master send DMA finish, check process later
{
/** DMA1-6 (I2Cx Tx DMA)transfer complete INTSTS */
I2C_EnableDMA(I2Cx, DISABLE);
DMA_EnableChannel(DMA1_CH6, DISABLE);
/** wait until BTF */
while (!I2C_GetFlag(I2Cx, I2C_FLAG_BYTEF))
;
I2C_GenerateStop(I2Cx, ENABLE);
/** wait until BUSY clear */
while (I2C_GetFlag(I2Cx, I2C_FLAG_BUSY))
;
i2c_comm_state = COMM_IN_PROCESS;
}
else /// slave send DMA finish
{
}
DMA_ClearFlag(DMA1_FLAG_TC6, DMA1);
}
if (DMA_GetFlagStatus(DMA1_FLAG_GL6, DMA1))
{
DMA_ClearFlag(DMA1_FLAG_GL6, DMA1);
}
if (DMA_GetFlagStatus(DMA1_FLAG_HT6, DMA1))
{
DMA_ClearFlag(DMA1_FLAG_HT6, DMA1);
}
}
/**
* @brief I2c1 dma receive interrupt Service Routines.
*/
void i2c1_receive_dma_handle(void)
{
if (DMA_GetFlagStatus(DMA1_FLAG_TC7, DMA1))
{
if (I2Cx->STS2 & 0x01) /// master receive DMA finish
{
I2C_EnableDMA(I2Cx, DISABLE);
I2C_GenerateStop(I2Cx, ENABLE);
i2c_comm_state = COMM_DONE;
}
else /// slave receive DMA finish
{
}
DMA_ClearFlag(DMA1_FLAG_TC7, DMA1);
}
if (DMA_GetFlagStatus(DMA1_FLAG_GL7, DMA1))
{
DMA_ClearFlag(DMA1_FLAG_GL7, DMA1);
}
if (DMA_GetFlagStatus(DMA1_FLAG_HT7, DMA1))
{
DMA_ClearFlag(DMA1_FLAG_HT7, DMA1);
}
}
#endif /* RT_USING_I2C_DMA */
/**
* @brief Wait eeprom standby state.
*/
void I2C_EE_WaitEepromStandbyState(struct rt_i2c_bus_device *i2c_bus)
{
struct rt_i2c_bus *rt_i2c = (struct rt_i2c_bus *)i2c_bus;
__IO uint16_t tmpSR1 = 0;
__IO uint32_t sEETrials = 0;
I2C_Module* I2Cx;
I2Cx = (I2C_Module*)(rt_i2c->i2c_periph);
/** While the bus is busy */
sEETimeout = sEE_LONG_TIMEOUT;
while (I2C_GetFlag(I2C1, I2C_FLAG_BUSY))
{
if ((sEETimeout--) == 0)
sEE_TIMEOUT_UserCallback();
}
/** Keep looping till the slave acknowledge his address or maximum number
of trials is reached (this number is defined by sEE_MAX_TRIALS_NUMBER) */
while (1)
{
/** Send START condition */
I2C_GenerateStart(I2Cx, ENABLE);
/** Test on EV5 and clear it */
sEETimeout = sEE_LONG_TIMEOUT;
while (!I2C_CheckEvent(I2Cx, I2C_EVT_MASTER_MODE_FLAG))
{
if ((sEETimeout--) == 0)
sEE_TIMEOUT_UserCallback();
}
/** Send EEPROM address for write */
I2C_SendAddr7bit(I2Cx, EEPROM_ADDRESS, I2C_DIRECTION_SEND);
/** Wait for ADDR flag to be set (Slave acknowledged his address) */
sEETimeout = sEE_LONG_TIMEOUT;
do
{
/** Get the current value of the STS1 register */
tmpSR1 = I2Cx->STS1;
/** Update the timeout value and exit if it reach 0 */
if ((sEETimeout--) == 0)
sEE_TIMEOUT_UserCallback();
}
/** Keep looping till the Address is acknowledged or the AF flag is
set (address not acknowledged at time) */
while ((tmpSR1 & (I2C_STS1_ADDRF | I2C_STS1_ACKFAIL)) == 0);
/** Check if the ADDR flag has been set */
if (tmpSR1 & I2C_STS1_ADDRF)
{
/** Clear ADDR Flag by reading STS1 then STS2 registers (STS1 have already
been read) */
(void)I2Cx->STS2;
/** STOP condition */
I2C_GenerateStop(I2Cx, ENABLE);
/** Exit the function */
return;
}
else
{
/** Clear AF flag */
I2C_ClrFlag(I2Cx, I2C_FLAG_ACKFAIL);
}
/** Check if the maximum allowed numbe of trials has bee reached */
if (sEETrials++ == sEE_MAX_TRIALS_NUMBER)
{
/** If the maximum number of trials has been reached, exit the function */
sEE_TIMEOUT_UserCallback();
}
}
}
/**
* @brief Configures the different system clocks.
*/
static rt_err_t rt_eeprom_init(rt_device_t dev)
{
return RT_EOK;
}
static rt_err_t rt_eeprom_open(rt_device_t dev, rt_uint16_t oflag)
{
return RT_EOK;
}
static rt_err_t rt_eeprom_close(rt_device_t dev)
{
return RT_EOK;
}
/* SPI Dev device interface, compatible with RT-Thread 0.3.x/1.0.x */
static rt_size_t rt_eeprom_read(rt_device_t dev,
rt_off_t pos,
void *buffer,
rt_size_t size)
{
static struct rt_i2c_bus_device *i2c_bus;
int ret = 0;
int retries = 0;
#if defined(RT_USING_I2C1)
i2c_bus = rt_i2c_bus_device_find("i2c1");
#endif
#if defined(RT_USING_I2C2)
i2c_bus = rt_i2c_bus_device_find("i2c2");
#endif
if((dev->flag & RT_DEVICE_FLAG_RDONLY) == RT_DEVICE_FLAG_RDONLY)
{
struct rt_i2c_msg msgs[] =
{
{
.addr = EEPROM_ADDRESS,
.flags = RT_I2C_WR,
.len = 1,
.buf = (rt_uint8_t*)&pos,
},
{
.addr = EEPROM_ADDRESS,
.flags = RT_I2C_RD,
.len = size,
.buf = buffer,
},
};
while (retries < IIC_RETRY_NUM)
{
ret = rt_i2c_transfer(i2c_bus, msgs, 2);
if (ret == 2)break;
retries++;
}
if (retries >= IIC_RETRY_NUM)
{
rt_kprintf("%s i2c read error: %d", __func__, ret);
return 0;
}
return ret;
}
else
{
return 0;
}
}
static rt_size_t rt_eeprom_write(rt_device_t dev,
rt_off_t pos,
const void *buffer,
rt_size_t size)
{
static struct rt_i2c_bus_device *i2c_bus;
#if defined(RT_USING_I2C1)
i2c_bus = rt_i2c_bus_device_find("i2c1");
#endif
#if defined(RT_USING_I2C2)
i2c_bus = rt_i2c_bus_device_find("i2c2");
#endif
if((dev->flag & RT_DEVICE_FLAG_RDONLY) == RT_DEVICE_FLAG_RDONLY)
{
I2C_EE_WriteBuffer(i2c_bus, (uint8_t*)buffer, pos, size);
return size;
}
else
{
return 0;
}
}
static rt_err_t rt_eeprom_control(rt_device_t dev,
int cmd,
void *args)
{
return RT_EOK;
}
rt_err_t rt_eeprom_register(rt_uint8_t flag)
{
static struct rt_device w25_dev;
w25_dev.type = RT_Device_Class_Unknown;
w25_dev.rx_indicate = RT_NULL;
w25_dev.tx_complete = RT_NULL;
w25_dev.init = rt_eeprom_init;
w25_dev.open = rt_eeprom_open;
w25_dev.close = rt_eeprom_close;
w25_dev.read = rt_eeprom_read;
w25_dev.write = rt_eeprom_write;
w25_dev.control = rt_eeprom_control;
return rt_device_register(&w25_dev, "eeprom", RT_DEVICE_FLAG_RDWR | flag);
}
/**
* @}
*/