文章目录
- 通过使用CMSIS库函数实现点灯实验
- 1 如何使用CMIS库
- 2 如何利用CMSIS库操作IO
- 两种实现方法的比较
- 课后作业:
- 完整代码:
- LED.C:
- test.c:
- led.h:
通过使用CMSIS库函数实现点灯实验
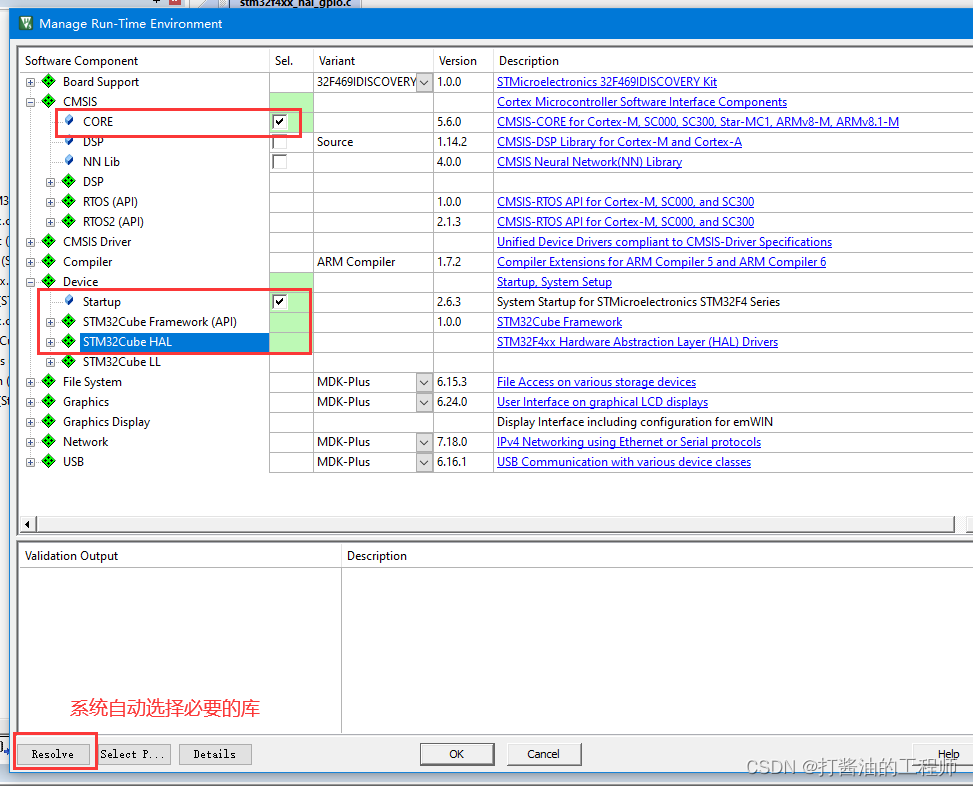
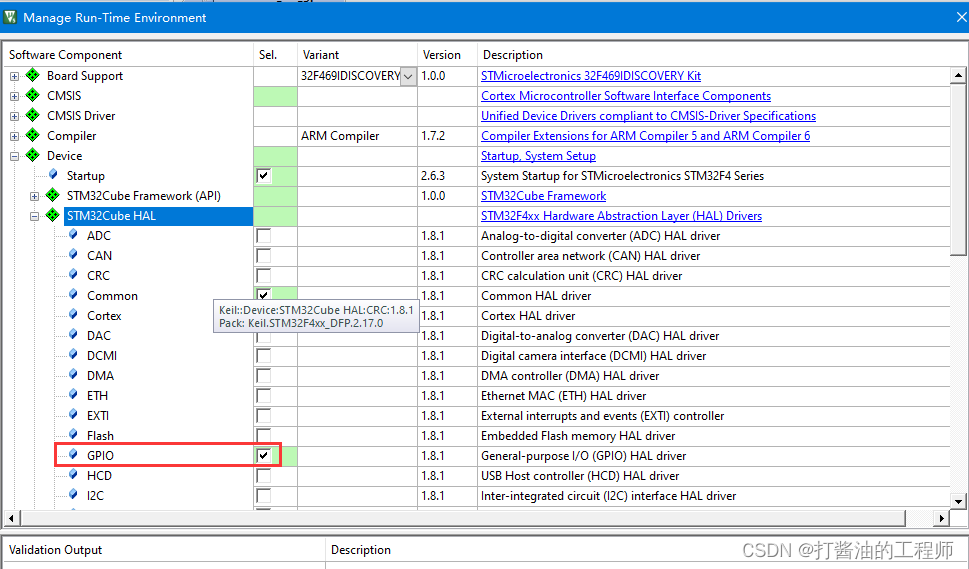
1 如何使用CMIS库
#####如何使用此驱动#####
==============================================================================
[. .]
(#)启用GPIO AHB时钟使用以下函数:__HAL_RCC_GPIOx_CLK_ENABLE()。
(#)使用HAL_GPIO_Init()配置GPIO引脚。
(++)使用GPIO_InitTypeDef结构体中的“mode”成员配置IO模式
(++)激活上拉,下拉电阻使用“拉”成员从GPIO_InitTypeDef结构。
(++)在输出或交替功能模式选择时:速度为通过GPIO_InitTypeDef结构中的“Speed”成员配置。
(++)在备用模式下为选择,备用功能连接IO通过GPIO_InitTypeDef结构中的“Alternate”成员配置。
(++)当引脚用作ADC通道时,需要模拟模式或DAC输出。
(++)在外部中断/事件的情况下,选择“Mode”成员从GPIO_InitTypeDef结构选择类型(中断或事件)和相应的触发事件(上升或下降或两者都有)。
在外部中断/事件模式选择的情况下,配置NVIC IRQ优先级使用HAL_NVIC_SetPriority()映射到EXTI行,并使用HAL_NVIC_EnableIRQ()。
(#)使用HAL_GPIO_ReadPin()获取在输入模式下配置的引脚电平。
(#)设置/重置在输出模式下配置的引脚的电平
HAL_GPIO_WritePin () / HAL_GPIO_TogglePin()。
(#)锁定引脚配置直到下一次重置使用HAL_GPIO_LockPin()。
(#)复位期间和复位后,备用功能不存在active,且GPIO引脚配置为输入浮动模式(JTAG除外)
针)。
(#) LSE振荡器引脚OSC32_IN和OSC32_OUT可作为通用器件使用(PC14和PC15),当LSE振荡器关闭时,LSE优先于GPIO功能。。
(#) HSE振荡器引脚OSC_IN/OSC_OUT可用作通用PH0和PH1,当HSE振荡器关闭时。HSE优先于GPIO功能。
初始化:void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init)
输入参数检查:
/* Check the parameters */
assert_param(IS_GPIO_ALL_INSTANCE(GPIOx));
assert_param(IS_GPIO_PIN(GPIO_Init->Pin));
assert_param(IS_GPIO_MODE(GPIO_Init->Mode));
类似的处理,厂家的代码更加健壮。
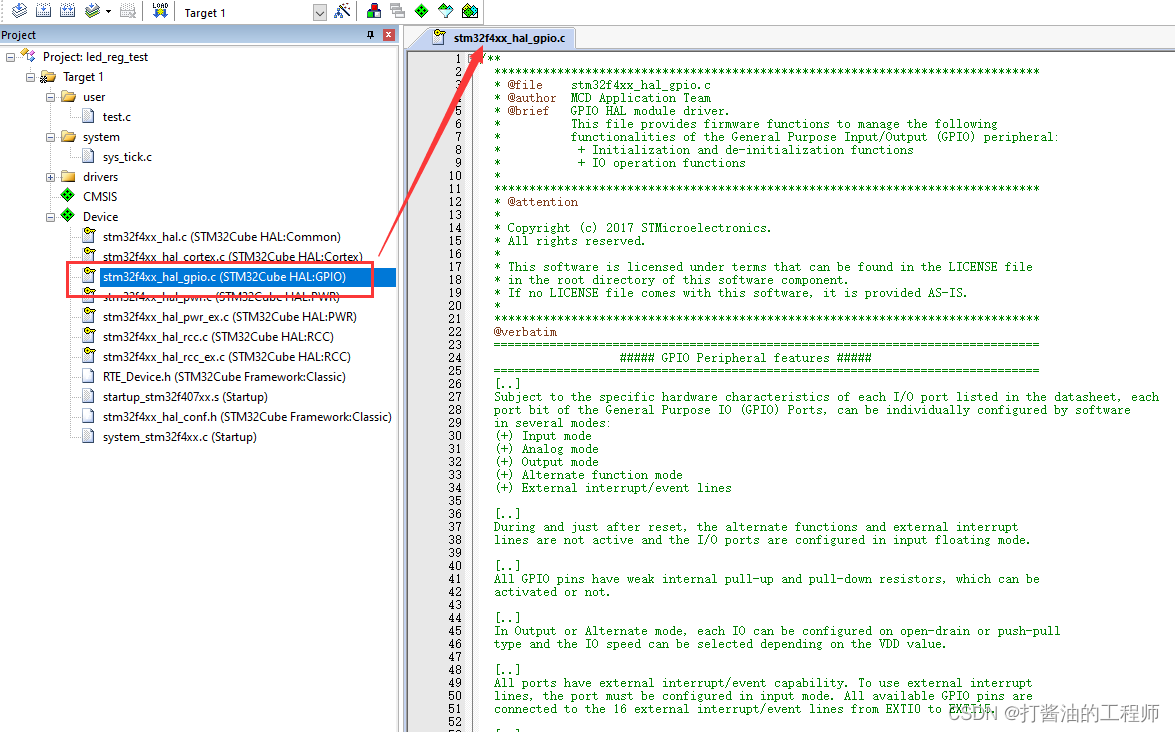
引用库后需要先编译一下, 才能出现头文件.h。
2 如何利用CMSIS库操作IO
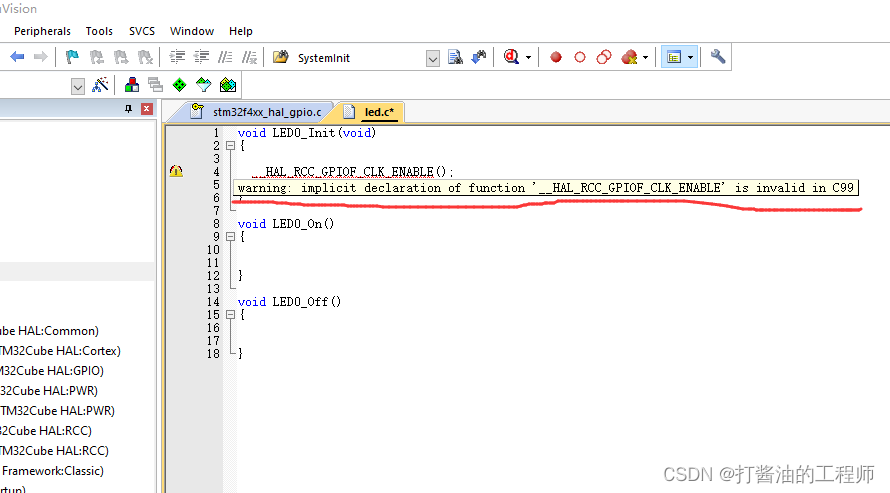
根据 Enable the GPIO AHB clock using the following function: __HAL_RCC_GPIOx_CLK_ENABLE(). 初始化需首先调用 __HAL_RCC_GPIOx_CLK_ENABLE()
void LED0_Init(void)
{
__HAL_RCC_GPIOF_CLK_ENABLE();
}
提示警告:
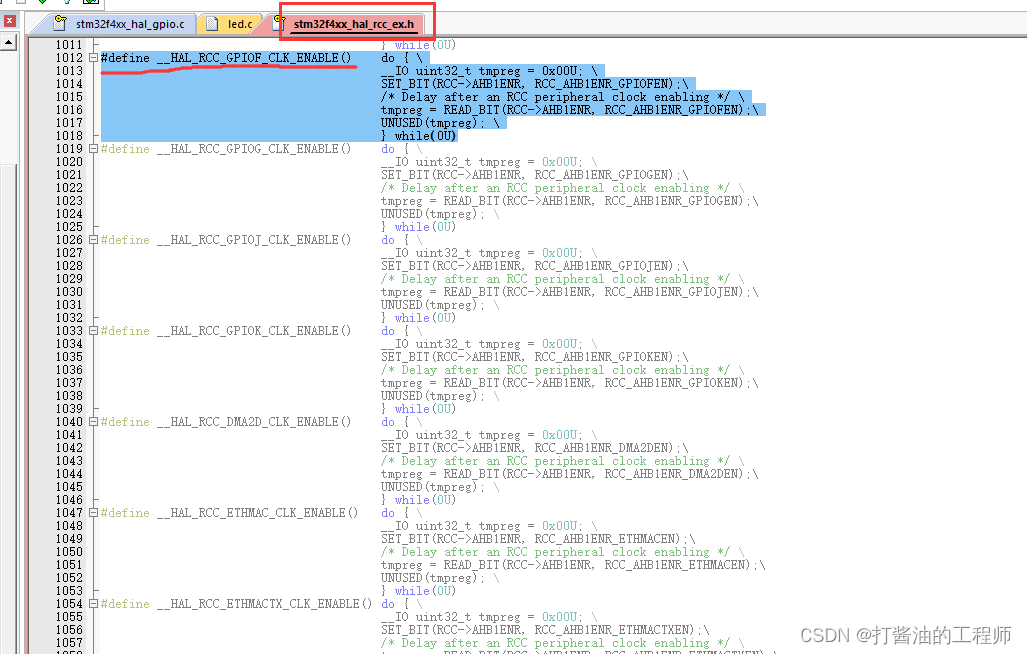
打开stm32f4xx_hal_rcc_ex.h:
端口F的初始化宏定义:
#define __HAL_RCC_GPIOF_CLK_ENABLE() do { \
__IO uint32_t tmpreg = 0x00U; \
SET_BIT(RCC->AHB1ENR, RCC_AHB1ENR_GPIOFEN);\
/* Delay after an RCC peripheral clock enabling */ \
tmpreg = READ_BIT(RCC->AHB1ENR, RCC_AHB1ENR_GPIOFEN);\
UNUSED(tmpreg); \
} while(0U)
需要将头文件包含在代码中去。
加入初始化stm32f4xx_hal_gpio.c中的void HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init),增加函数:HAL_GPIO_Init(GPIO_TypeDef *GPIOx, GPIO_InitTypeDef *GPIO_Init)
参数1为:GPIOF,参数2为: gpio_info
先定义结构体参数gpio_info:GPIO_InitTypeDef gpio_info,而GPIO_InitTypeDef的定义在:#include "stm32f4xx_hal_gpio.h"中,引入:
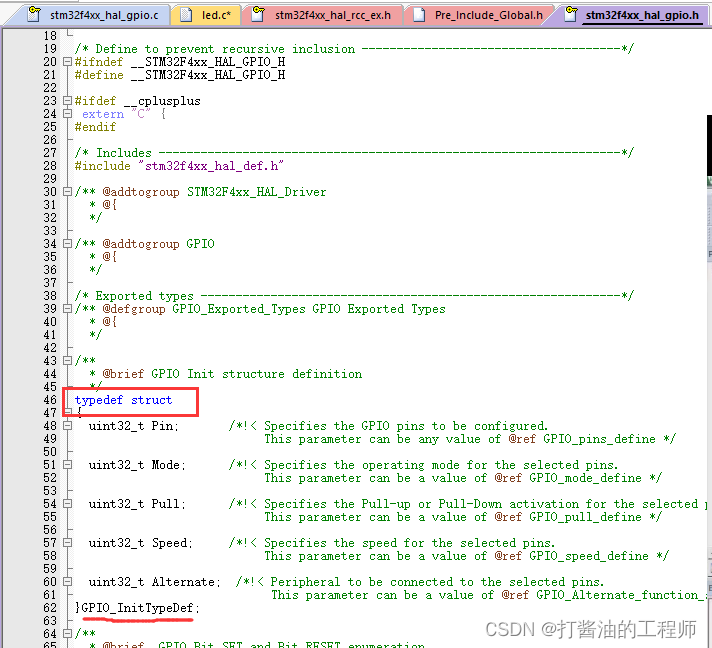
提示错误: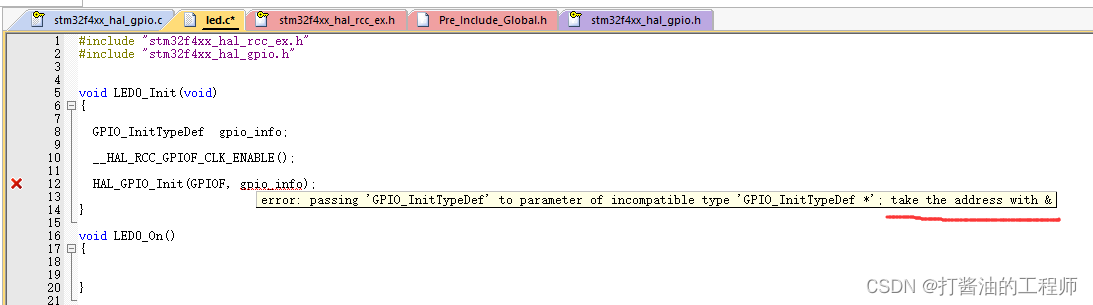
取地址,根据提示增加&,解决。
开始写gpio_info的参数,取值在"stm32f4xx_hal_gpio.h"中进行了定义,直接使用宏定义的值:
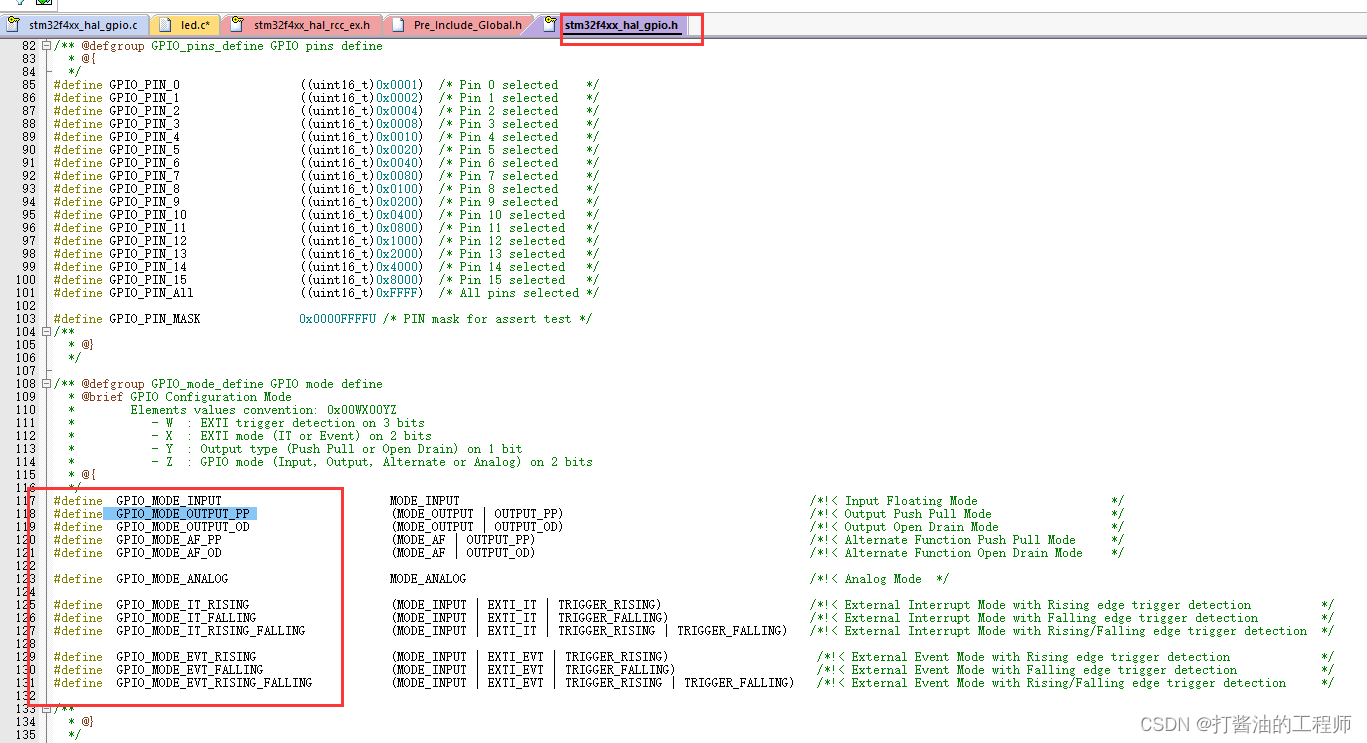
gpio_info.Mode = GPIO_MODE_OUTPUT_PP;
定义速度Speed,头文件中的定义为:
/** @defgroup GPIO_speed_define GPIO speed define
* @brief GPIO Output Maximum frequency
* @{
*/
#define GPIO_SPEED_FREQ_LOW 0x00000000U /*!< IO works at 2 MHz, please refer to the product datasheet */
#define GPIO_SPEED_FREQ_MEDIUM 0x00000001U /*!< range 12,5 MHz to 50 MHz, please refer to the product datasheet */
#define GPIO_SPEED_FREQ_HIGH 0x00000002U /*!< range 25 MHz to 100 MHz, please refer to the product datasheet */
#define GPIO_SPEED_FREQ_VERY_HIGH 0x00000003U /*!< range 50 MHz to 200 MHz, please refer to the product datasheet */
/**
* @}
*/
其他可设置的模式:
/** @defgroup GPIO_mode_define GPIO mode define
* @brief GPIO Configuration Mode
* Elements values convention: 0x00WX00YZ
* - W : EXTI trigger detection on 3 bits
* - X : EXTI mode (IT or Event) on 2 bits
* - Y : Output type (Push Pull or Open Drain) on 1 bit
* - Z : GPIO mode (Input, Output, Alternate or Analog) on 2 bits
* @{
*/
#define GPIO_MODE_INPUT MODE_INPUT /*!< Input Floating Mode */
#define GPIO_MODE_OUTPUT_PP (MODE_OUTPUT | OUTPUT_PP) /*!< Output Push Pull Mode */
#define GPIO_MODE_OUTPUT_OD (MODE_OUTPUT | OUTPUT_OD) /*!< Output Open Drain Mode */
#define GPIO_MODE_AF_PP (MODE_AF | OUTPUT_PP) /*!< Alternate Function Push Pull Mode */
#define GPIO_MODE_AF_OD (MODE_AF | OUTPUT_OD) /*!< Alternate Function Open Drain Mode */
#define GPIO_MODE_ANALOG MODE_ANALOG /*!< Analog Mode */
#define GPIO_MODE_IT_RISING (MODE_INPUT | EXTI_IT | TRIGGER_RISING) /*!< External Interrupt Mode with Rising edge trigger detection */
#define GPIO_MODE_IT_FALLING (MODE_INPUT | EXTI_IT | TRIGGER_FALLING) /*!< External Interrupt Mode with Falling edge trigger detection */
#define GPIO_MODE_IT_RISING_FALLING (MODE_INPUT | EXTI_IT | TRIGGER_RISING | TRIGGER_FALLING) /*!< External Interrupt Mode with Rising/Falling edge trigger detection */
#define GPIO_MODE_EVT_RISING (MODE_INPUT | EXTI_EVT | TRIGGER_RISING) /*!< External Event Mode with Rising edge trigger detection */
#define GPIO_MODE_EVT_FALLING (MODE_INPUT | EXTI_EVT | TRIGGER_FALLING) /*!< External Event Mode with Falling edge trigger detection */
#define GPIO_MODE_EVT_RISING_FALLING (MODE_INPUT | EXTI_EVT | TRIGGER_RISING | TRIGGER_FALLING) /*!< External Event Mode with Rising/Falling edge trigger detection */
/**
* @}
*/
/** @defgroup GPIO_pull_define GPIO pull define
* @brief GPIO Pull-Up or Pull-Down Activation
* @{
*/
#define GPIO_NOPULL 0x00000000U /*!< No Pull-up or Pull-down activation */
#define GPIO_PULLUP 0x00000001U /*!< Pull-up activation */
#define GPIO_PULLDOWN 0x00000002U /*!< Pull-down activation */
/**
* @}
*/
```
定义要操作的端口,gpio_info.Pin:gpio_info.Pin = GPIO_PIN_9;
来源:"stm32f4xx_hal_gpio.h":
```C
/** @defgroup GPIO_pins_define GPIO pins define
* @{
*/
#define GPIO_PIN_0 ((uint16_t)0x0001) /* Pin 0 selected */
#define GPIO_PIN_1 ((uint16_t)0x0002) /* Pin 1 selected */
#define GPIO_PIN_2 ((uint16_t)0x0004) /* Pin 2 selected */
#define GPIO_PIN_3 ((uint16_t)0x0008) /* Pin 3 selected */
#define GPIO_PIN_4 ((uint16_t)0x0010) /* Pin 4 selected */
#define GPIO_PIN_5 ((uint16_t)0x0020) /* Pin 5 selected */
#define GPIO_PIN_6 ((uint16_t)0x0040) /* Pin 6 selected */
#define GPIO_PIN_7 ((uint16_t)0x0080) /* Pin 7 selected */
#define GPIO_PIN_8 ((uint16_t)0x0100) /* Pin 8 selected */
#define GPIO_PIN_9 ((uint16_t)0x0200) /* Pin 9 selected */
#define GPIO_PIN_10 ((uint16_t)0x0400) /* Pin 10 selected */
#define GPIO_PIN_11 ((uint16_t)0x0800) /* Pin 11 selected */
#define GPIO_PIN_12 ((uint16_t)0x1000) /* Pin 12 selected */
#define GPIO_PIN_13 ((uint16_t)0x2000) /* Pin 13 selected */
#define GPIO_PIN_14 ((uint16_t)0x4000) /* Pin 14 selected */
#define GPIO_PIN_15 ((uint16_t)0x8000) /* Pin 15 selected */
#define GPIO_PIN_All ((uint16_t)0xFFFF) /* All pins selected */
#define GPIO_PIN_MASK 0x0000FFFFU /* PIN mask for assert test */
/**
* @}
*/
```
其他参数采用复位值即可。
配置端口为高电平,用到的函数为HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState):
GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin定义按前述变量填写。
GPIO_PinStatw定义为enmu,枚举变量,定义为:
```C
/**
* @brief GPIO Bit SET and Bit RESET enumeration
*/
typedef enum
{
GPIO_PIN_RESET = 0,
GPIO_PIN_SET
}GPIO_PinState;
/**
* @}
*/
此处定义为:GPIO_PIN_SET,初始化完成后,默认为不亮的。
两种实现方法的比较
- 更好的可移植性
- 更好的可靠性
- 代码占用的空间
- 更大更好的使用性
课后作业:
1:如何写一个更加通用移植性更好的控制灯的函数
利用库函数控制:
void Led_Ctrl(GPIo_TypeDef* GPIOx,uint16_t led_pin,uint8_t ctrl)
{
if(LED_ON==ctrl)
HAL_GPIO_WritePin(GPIOx, led_pin, GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOx, led_pin, GPIO_PIN_SET);
}
重新编译工程标准库的GPIO功能的时候出现了error: #20: identifier “HAL_StatusTypeDef” is undefined问题。

解决方式:#include "stm32f4xx_hal.h"后,添加user目录下的test.c(有main函数即可),成功编译。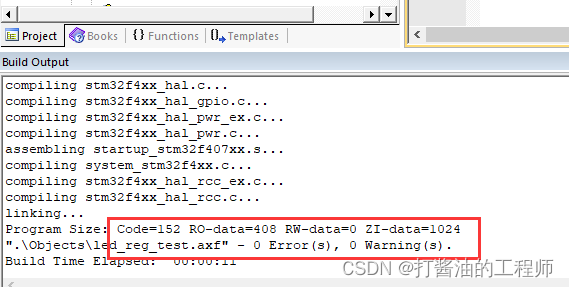
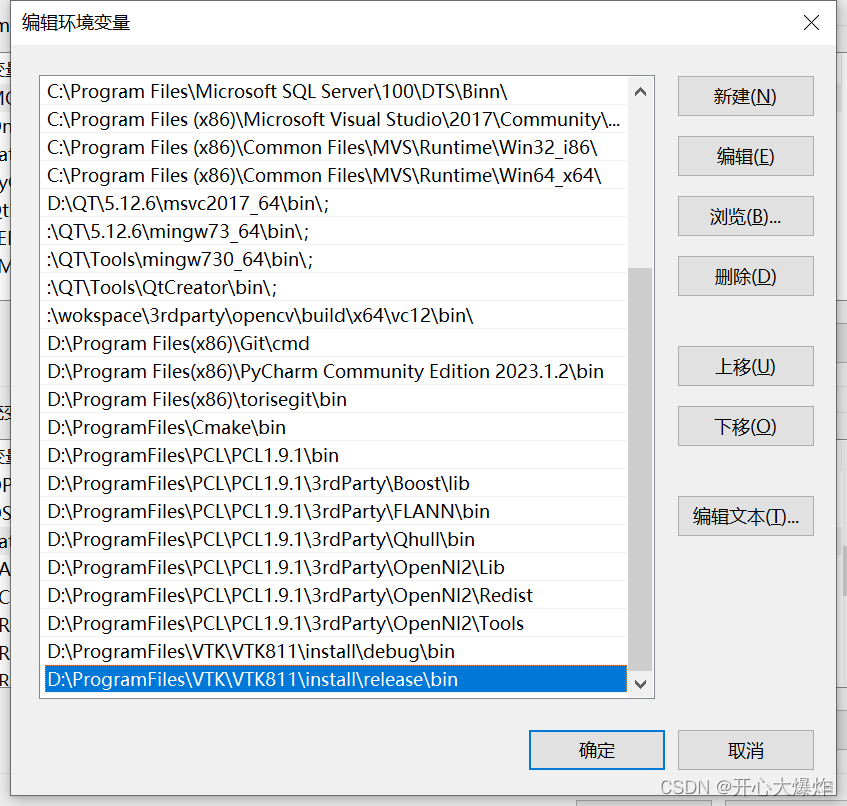
include目录可添加指定目录: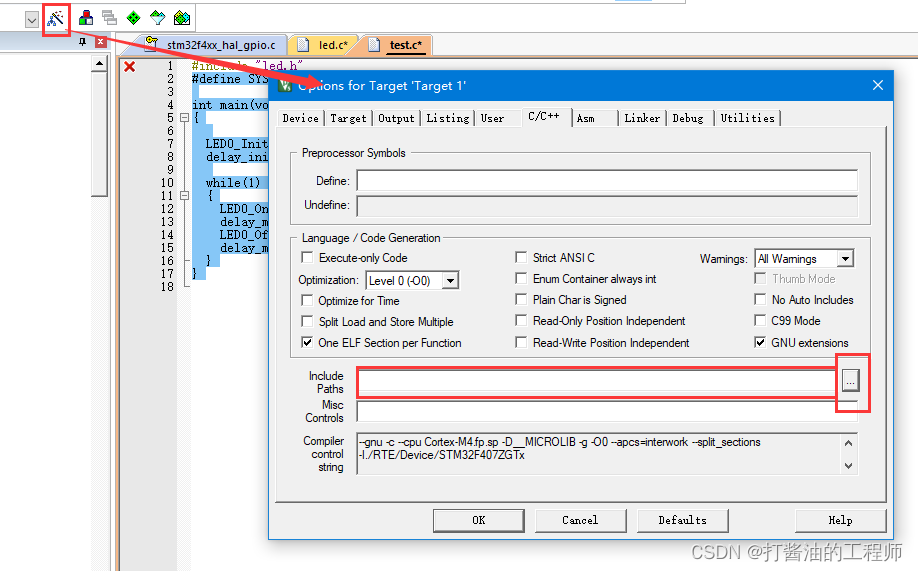
另外,GPIO_InitTypeDef 也可以采用指针形式,如: *p_gpio_info;
对指针的存储空间进行分配,用malloc
GPIO_InitTypeDef *p_gpio_info; //方法2:定义指针
p_gpio_info = malloc(sizeof(GPIO_InitTypeDef));//如警告没有声明,则需要引用标准库:#include "stdlib.h"
更多的操作说明,以stm32f4xx_hal.c为例,提供了常用的硬件相关的API:
The HAL contains two APIs’ categories:
(+) Common HAL APIs
(+) Services HAL APIs
如:初始化HAL_StatusTypeDef HAL_Init(void)
主堆栈初始化:
/**
- @brief Initialize the MSP.
- @retval None
*/
__weak void HAL_MspInit(void)
延时函数:
__weak void HAL_Delay(uint32_t Delay)
{
uint32_t tickstart = HAL_GetTick();
uint32_t wait = Delay;
/* Add a freq to guarantee minimum wait */
if (wait < HAL_MAX_DELAY)
可以尝试采用。
完整代码:
LED.C:
#include "stm32f4xx_hal.h"
#include "stm32f4xx_hal_rcc.h"
#include "stm32f4xx_hal_gpio.h"
#include "stdlib.h"
#include "stm32f4xx.h"
#include "led.h"
static u8 fac_us=0; //us延时倍乘数
static u16 fac_ms=0; //ms延时倍乘数,在ucos下,代表每个节拍的ms数
void LED0_Init(void)
{
GPIO_InitTypeDef gpio_info;
GPIO_InitTypeDef *p_gpio_info; //方法2:定义指针
p_gpio_info = malloc(sizeof(GPIO_InitTypeDef));//如警告没有声明,则需要引用标准库:#include "stdlib.h"
__HAL_RCC_GPIOF_CLK_ENABLE();
p_gpio_info->Pin = GPIO_PIN_10; //方法2:指针赋值
p_gpio_info->Mode = GPIO_MODE_OUTPUT_PP;
p_gpio_info->Speed = GPIO_SPEED_FREQ_MEDIUM;
gpio_info.Pin = GPIO_PIN_9;
gpio_info.Mode = GPIO_MODE_OUTPUT_PP;
gpio_info.Speed = GPIO_SPEED_FREQ_MEDIUM; //其他参数采用复位值即可
HAL_GPIO_Init(GPIOF, &gpio_info);
//HAL_GPIO_Init(GPIOF,p_gpio_info); //方法2
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_9, GPIO_PIN_SET);
}
void LED0_On()
{
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_9, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_10, GPIO_PIN_SET);
}
void LED0_Off()
{
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_9, GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOF, GPIO_PIN_10, GPIO_PIN_SET);
}
void Led_Ctrl(GPIO_TypeDef* GPIOx,uint16_t led_pin,uint8_t ctrl)
{
if(LED_ON==ctrl)
HAL_GPIO_WritePin(GPIOx, led_pin, GPIO_PIN_RESET);
else
HAL_GPIO_WritePin(GPIOx, led_pin, GPIO_PIN_SET);
}
//初始化延迟函数
//当使用OS的时候,此函数会初始化OS的时钟节拍
//SYSTICK的时钟固定为HCLK时钟的1/8
//SYSCLK:系统时钟
void delay_init(u8 SYSCLK)
{
#if SYSTEM_SUPPORT_OS //如果需要支持OS.
u32 reload;
#endif
SysTick->CTRL&=~(1<<2); //SYSTICK使用外部时钟源
fac_us=SYSCLK/8; //不论是否使用OS,fac_us都需要使用
#if SYSTEM_SUPPORT_OS //如果需要支持OS.
reload=SYSCLK/8; //每秒钟的计数次数 单位为K
reload*=1000000/delay_ostickspersec; //根据delay_ostickspersec设定溢出时间
//reload为24位寄存器,最大值:16777216,在72M下,约合1.86s左右
fac_ms=1000/delay_ostickspersec; //代表OS可以延时的最少单位
SysTick->CTRL|=1<<1; //开启SYSTICK中断
SysTick->LOAD=reload; //每1/delay_ostickspersec秒中断一次
SysTick->CTRL|=1<<0; //开启SYSTICK
#else
fac_ms=(u16)fac_us*1000; //非OS下,代表每个ms需要的systick时钟数
#endif
}
//延时nus
//nus为要延时的us数.
void delay_us(u32 nus)
{
u32 temp;
SysTick->LOAD=nus*fac_us; //时间加载
SysTick->VAL=0x00; //清空计数器
SysTick->CTRL=0x01 ; //开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(1<<16))); //等待时间到达
SysTick->CTRL=0x00; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
//延时nms
//注意nms的范围
//SysTick->LOAD为24位寄存器,所以,最大延时为:
//nms<=0xffffff*8*1000/SYSCLK
//SYSCLK单位为Hz,nms单位为ms
//对72M条件下,nms<=1864
void delay_ms(u16 nms)
{
u32 temp;
SysTick->LOAD=(u32)nms*fac_ms; //时间加载(SysTick->LOAD为24bit)
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL=0x01 ; //开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(1<<16))); //等待时间到达
SysTick->CTRL=0x00; //关闭计数器
SysTick->VAL =0X00; //清空计数器
}
test.c:
#include "stm32f4xx.h"
#include "led.h"
#define SYS_MAX_CLK 12
int main(void)
{
LED0_Init();//初始化LEDO
//delay_init(SYS_MAX_CLK);//初始化系统时钟
while(1)
{
/*
LED0_On(); //点亮LEDO
//delay_ms(1000); //延时1s
LED0_Off(); //关闭LED0
//delay_ms(1000); //延时1s
*/
Led_Ctrl(LED0_PIN_ROW, LED0_PIN, LED_ON);
Led_Ctrl(LED1_PIN_ROW, LED0_PIN, LED_OFF);
//delay_ms(DELAY_1S); //延时1s
Led_Ctrl(LED0_PIN_ROW, LED0_PIN, LED_OFF);
Led_Ctrl(LED1_PIN_ROW, LED0_PIN, LED_ON);
//delay_ms(DELAY_1S); //延时1s
}
}
led.h:
#include "stm32f4xx_hal_gpio.h"
#ifndef __LED_H
#define __LED_H
#define LED0_PIN_ROW GPIOF
#define LED1_PIN_ROW GPIOF
#define LED0_PIN GPIO_PIN_9
#define LED1_PIN GPIO_PIN_10
#define LED_ON 1
#define LED_OFF 2
void LED0_Init(void);//初始化
void LED0_On(void);
void LED0_Off(void);
void Led_Ctrl(GPIO_TypeDef* GPIOx,uint16_t led_pin,uint8_t ctrl);
#endif
2:通过本节课学习的内客,结合板上蜂呜器的电路,实现一个小型的告警系统,要求蜂鸣器周期性的响2S,停5S。使用CMSIS提供的延时函数。