前言

「作者主页」:雪碧有白泡泡
「个人网站」:雪碧的个人网站
「推荐专栏」:
★java一站式服务 ★
★前端炫酷代码分享
★ ★ uniapp-从构建到提升★
★ 从0到英雄,vue成神之路★
★ 解决算法,一个专栏就够了★
★ 架构咱们从0说★
★ 数据流通的精妙之道★

文章目录
- 前言
- ୧⍤⃝介绍Apollo自动驾驶
- 🎀1.1 Apollo自动驾驶的背景和发展
- 🎀1.2 Apollo自动驾驶的核心技术
- 🎀1.3 Apollo在市场上的应用和前景
- ୧⍤⃝Apollo自动驾驶的核心技术
- 🎀2.1 传感器技术和数据采集
- 1. 使用激光雷达传感器获取点云数据:
- 2. 使用摄像头传感器捕获图像数据:
- 3. 使用雷达传感器获取距离和速度数据:
- 🎀2.2 人工智能与机器学习在Apollo中的应用
- 1. 目标检测:
- 2. 目标跟踪:
- 3. 行为预测:
- 🎀2.3 高精度地图与定位技术
- 1. 创建地图对象:
- 2. 获取道路信息:
- 3. 定位车辆:
- 🎀2.4 感知与障碍物检测
- 🎀2.5 路径规划与决策算法
- 🎀2.6 控制与执行系统
- ୧⍤⃝Apollo在市场上的应用和前景
- 🎀3.1 Apollo自动驾驶在私家车领域的应用
- 🎀3.2 Apollo自动驾驶在商业运输领域的应用
- 🎀3.3 Apollo自动驾驶的竞争对手分析
- 🎀3.4 Apollo自动驾驶面临的挑战与未来发展趋势
୧⍤⃝介绍Apollo自动驾驶
🎀1.1 Apollo自动驾驶的背景和发展
Apollo自动驾驶是百度公司(Baidu)开发的一款自动驾驶技术平台。它起源于百度成立的自动驾驶实验室,旨在推动自动驾驶技术的研究与发展。自2017年起,Apollo自动驾驶逐渐成为全球自动驾驶领域的重要参与者。

🎀1.2 Apollo自动驾驶的核心技术
Apollo自动驾驶的核心技术包括传感器技术和数据采集、人工智能与机器学习、高精度地图与定位技术、感知与障碍物检测、路径规划与决策算法以及控制与执行系统等方面。
🎀1.3 Apollo在市场上的应用和前景
Apollo自动驾驶已经在不同领域展示了广泛的应用前景。它可以用于私家车领域的自动驾驶汽车,提供更安全、便捷的交通方式。此外,Apollo还可以应用于商业运输领域,提高货运效率并降低成本。随着技术的不断发展和成熟,Apollo在市场上的应用前景将进一步扩大。

୧⍤⃝Apollo自动驾驶的核心技术
🎀2.1 传感器技术和数据采集
Apollo自动驾驶使用了多种传感器,如激光雷达、摄像头、雷达等,以获取周围环境的数据。通过传感器技术和数据采集,Apollo能够实时感知车辆周围的道路、障碍物和其他交通参与者。
1. 使用激光雷达传感器获取点云数据:
import rospy
from sensor_msgs.msg import PointCloud2
def point_cloud_callback(msg):
# 处理点云数据
pass
def main():
rospy.init_node('point_cloud_subscriber')
rospy.Subscriber('/apollo/sensor/lidar_front/PointCloud2', PointCloud2, point_cloud_callback)
rospy.spin()
if __name__ == '__main__':
main()
2. 使用摄像头传感器捕获图像数据:

import cv2
def main():
camera = cv2.VideoCapture(0) # 0表示第一个摄像头设备
while True:
ret, frame = camera.read() # 读取摄像头帧
if not ret:
break
# 处理图像帧
cv2.imshow('Camera', frame)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
camera.release()
cv2.destroyAllWindows()
if __name__ == '__main__':
main()
3. 使用雷达传感器获取距离和速度数据:
import rospy
from sensor_msgs.msg import LaserScan
def laser_scan_callback(msg):
ranges = msg.ranges # 每个角度的距离值
intensities = msg.intensities # 强度值(如果可用)
# 处理激光扫描数据
pass
def main():
rospy.init_node('laser_scan_subscriber')
rospy.Subscriber('/apollo/sensor/lidar_front/LaserScan', LaserScan, laser_scan_callback)
rospy.spin()
if __name__ == '__main__':
main()
🎀2.2 人工智能与机器学习在Apollo中的应用
Apollo利用人工智能和机器学习算法进行数据处理和分析,从而提高自动驾驶系统的感知、决策和控制能力。通过对大量数据的学习,Apollo能够不断优化和改进自身的驾驶能力。
以下是一些示例代码,展示了人工智能和机器学习在Apollo中的应用:

1. 目标检测:
from apollo.perception.detection import ObjectDetector
# 创建目标检测器实例
detector = ObjectDetector()
# 加载预训练模型
detector.load_model('path/to/model')
# 输入图像进行目标检测
image = load_image('path/to/image')
detections = detector.detect(image)
# 打印检测结果
for detection in detections:
print(detection.class_label, detection.confidence, detection.box)
2. 目标跟踪:
from apollo.perception.tracking import ObjectTracker
# 创建目标跟踪器实例
tracker = ObjectTracker()
# 初始化跟踪器
tracker.initialize()
# 处理连续帧进行目标跟踪
for frame in video_frames:
detections = detector.detect(frame)
tracked_objects = tracker.track(detections)
# 打印跟踪结果
for obj in tracked_objects:
print(obj.id, obj.class_label, obj.bbox)
3. 行为预测:
from apollo.prediction.behavior_prediction import BehaviorPredictor
# 创建行为预测器实例
predictor = BehaviorPredictor()
# 加载预训练模型
predictor.load_model('path/to/model')
# 输入历史轨迹数据进行行为预测
history_trajectory = load_trajectory_data('path/to/data')
predicted_behavior = predictor.predict(history_trajectory)
# 打印预测结果
print(predicted_behavior)
🎀2.3 高精度地图与定位技术
高精度地图是Apollo自动驾驶的重要组成部分。它提供详细的道路信息和准确的定位数据,为自动驾驶车辆提供精准的导航和定位服务。借助高精度地图和定位技术,Apollo可以更加准确地感知周围环境并做出相应的决策。
对于高精度地图和定位技术,以下是一些示例代码分析:

1. 创建地图对象:
import apollo
map = apollo.Map("path/to/map/file")
在这个示例中,我们使用Apollo提供的地图类创建了一个地图对象。通过指定地图文件的路径,我们可以加载地图数据。
2. 获取道路信息:
road_id = 12345
road = map.get_road(road_id)
# 获取道路几何信息
geometry = road.geometry
# 获取道路宽度
width = road.width
# 获取道路限速信息
speed_limit = road.speed_limit
这段代码演示了如何从地图对象中获取道路信息。首先,我们使用
get_road()方法获取指定道路ID的道路对象。然后,我们可以从道路对象中获取几何信息、宽度和限速信息等。
3. 定位车辆:
import apollo
localizer = apollo.Localizer()
# 获取传感器数据(例如GPS、惯性测量单元等)
sensor_data = get_sensor_data()
# 进行定位
position = localizer.localize(sensor_data)
# 获取定位结果
x = position.x
y = position.y
z = position.z
这段代码展示了如何使用Apollo提供的定位器进行车辆定位。首先,我们创建了一个定位器对象。然后,我们获取传感器数据,并将其传递给定位器的
localize()方法进行定位。最后,我们可以从定位结果中获取车辆的位置信息。
🎀2.4 感知与障碍物检测
Apollo自动驾驶通过感知技术和障碍物检测算法来识别道路上的车辆、行人、障碍物等。这些技术能够帮助Apollo准确地理解周围环境,从而做出适应性强且安全的驾驶决策。
下面是一个典型的感知与障碍物检测流程:

传感器数据获取:自动驾驶系统通常使用多种传感器,如激光雷达(Lidar)、摄像头和雷达等来获取环境信息。这些传感器可以提供车辆周围的距离、速度、方向和形状等数据。
数据预处理:从传感器获取的原始数据需要进行预处理,以去除噪声、校正畸变、对齐不同传感器之间的数据等。
障碍物分割与分类:通过激光雷达或摄像头数据,可以使用分割算法将场景中的障碍物从背景中分离出来。常见的分割算法包括语义分割、实例分割和背景建模等。分割后,可以使用识别和分类算法对障碍物进行分类,如车辆、行人、自行车等。
障碍物跟踪与运动估计:在连续的帧中,需要对障碍物进行跟踪,并估计其速度和运动轨迹。这可以通过使用滤波器(如卡尔曼滤波器)或深度学习模型来实现。
场景建图:将传感器数据中提取的障碍物信息与地图数据进行融合,构建车辆周围环境的三维场景地图。
以下是一些可能用于实现感知与障碍物检测的常见算法:
深度学习算法:卷积神经网络(CNN)在图像和点云数据上的应用广泛,可用于分割、识别和跟踪障碍物。常见的网络架构包括FCN、U-Net、YOLO、SSD等。
激光雷达处理算法:例如最小二乘法(Least Squares)、RANSAC(Random Sample Consensus)或分段线性回归(Segmented Linear Regression)用于拟合点云数据,以提取平面或障碍物形状。
运动估计算法:卡尔曼滤波器、扩展卡尔曼滤波器(EKF)或粒子滤波器(Particle Filter)可用于估计障碍物的位置和速度。
场景建图算法:常见的算法包括概率地图(Occupancy Grid)、OctoMap、地标图(Feature Map)等,用于将感知到的障碍物信息与先验地图进行融合。
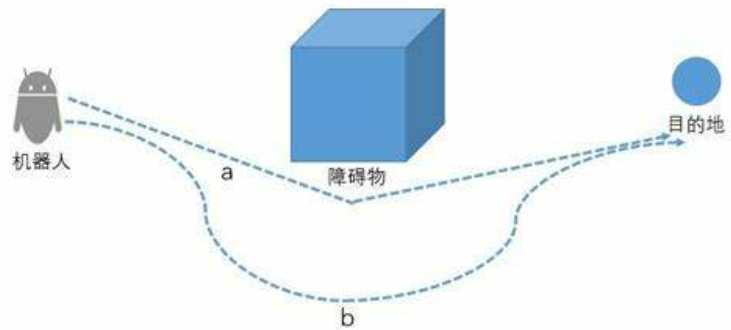
🎀2.5 路径规划与决策算法
路径规划和决策算法是Apollo自动驾驶的关键组成部分。根据感知数据和目标要求,Apollo能够生成合适的行驶路径,并做出决策以应对不同的交通情况和障碍物。
🎀2.6 控制与执行系统
控制与执行系统负责将路径规划和决策转化为具体的车辆操作。通过精确的控制和执行,Apollo可以实现自动转向、加速、制动等操作,以确保安全和稳定的驾驶行为。
以下是一个简单的代码示例来说明控制与执行系统的工作原理:
def control_and_execute(decision):
if decision == "turn_left":
steer_left()
elif decision == "turn_right":
steer_right()
elif decision == "accelerate":
speed_up()
elif decision == "brake":
slow_down()
else:
maintain_speed()
def steer_left():
# 执行左转操作的代码
def steer_right():
# 执行右转操作的代码
def speed_up():
# 执行加速操作的代码
def slow_down():
# 执行减速操作的代码
def maintain_speed():
# 保持当前速度的代码
# 路径规划和决策过程
decision = path_planning_and_decision()
control_and_execute(decision)
在上述代码中,control_and_execute() 函数接收路径规划和决策结果作为参数,并根据决策结果执行相应的操作。如果决策是左转,则调用 steer_left() 函数来执行左转操作;如果决策是右转,则调用 steer_right() 函数来执行右转操作;如果决策是加速,则调用 speed_up() 函数来执行加速操作;如果决策是减速,则调用 slow_down() 函数来执行减速操作;否则,调用 maintain_speed() 函数来保持当前速度。
୧⍤⃝Apollo在市场上的应用和前景
🎀3.1 Apollo自动驾驶在私家车领域的应用
Apollo自动驾驶在私家车领域的应用可以为驾驶员提供更便捷、安全的出行方式。它可以帮助驾驶员减轻驾驶负担,提高行车安全性,并节省通勤时间。随着技术的进一步发展和成熟,预计在未来,Apollo自动驾驶将逐渐普及并广泛应用于私家车市场。
🎀3.2 Apollo自动驾驶在商业运输领域的应用
在商业运输领域,Apollo自动驾驶可以提供更高效、安全的货物运输服务。自动驾驶卡车和无人机等技术将能够实现长途货运的自动化操作,降低运营成本并提高运输效率。这对于物流行业来说具有重要意义,并有望推动行业的创新和发展。
🎀3.3 Apollo自动驾驶的竞争对手分析
在自动驾驶领域,Apollo面临着来自其他公司和技术平台的竞争。例如,特斯拉、Waymo、Uber等公司也在自动驾驶技术方面进行了大量的研究和开发。竞争对手的不断涌现将推动整个行业的发展和进步。
🎀3.4 Apollo自动驾驶面临的挑战与未来发展趋势
尽管Apollo自动驾驶在技术上取得了重要的突破,但仍面临一些挑战。例如,法律和监管的限制、安全性和可靠性的考虑等都是需要解决的问题。未来,Apollo自动驾驶将继续致力于技术创新和改进,以应对这些挑战并推动自动驾驶技术的普及与发展。