| 项目名称 | 实验一 ROS[Kinetic/Melodic/Noetic]入门 | 成绩 | ||
| 设计要求: 机器人操作系统安装、虚拟机、Docker、嵌入式系统 | ||||
| 实验记录(70分) 1.以 $ 开头的行是终端命令。 - 要打开一个新终端 → 使用快捷键 ctrl+alt+t。 - 要在现有终端内打开一个新选项卡 → 使用快捷键 ctrl+shift+t。 - 要在终端中终止进程 → 使用快捷键 crtl+c。 (注:以上内容在云平台可能有出入,并不能完全实现) 2.ROS 文件系统 rosdep初始化:sudo rosdep init rosdep更新:rosdep update 系统源更新:sudo apt update 系统更新:sudo apt upgrade 安装桌面版galactic:sudo apt install ros-galactic-desktop 例1:系统源更新:sudo apt update
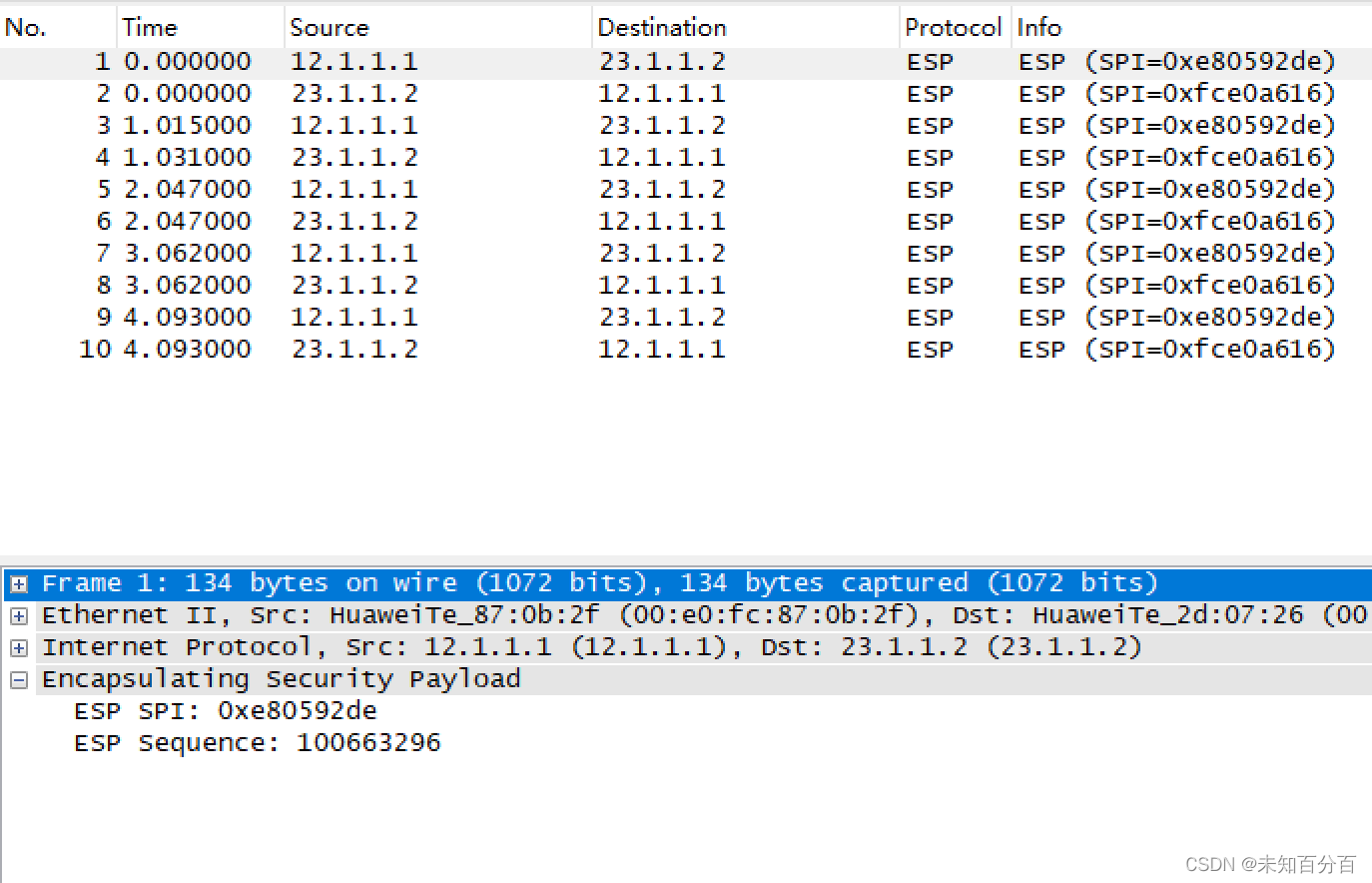
图1 数字签名出错截图 原因:显示没有公钥。 没有公钥解决办法: 新打开一个命令行终端并输入如下命令: gedit ros.asc
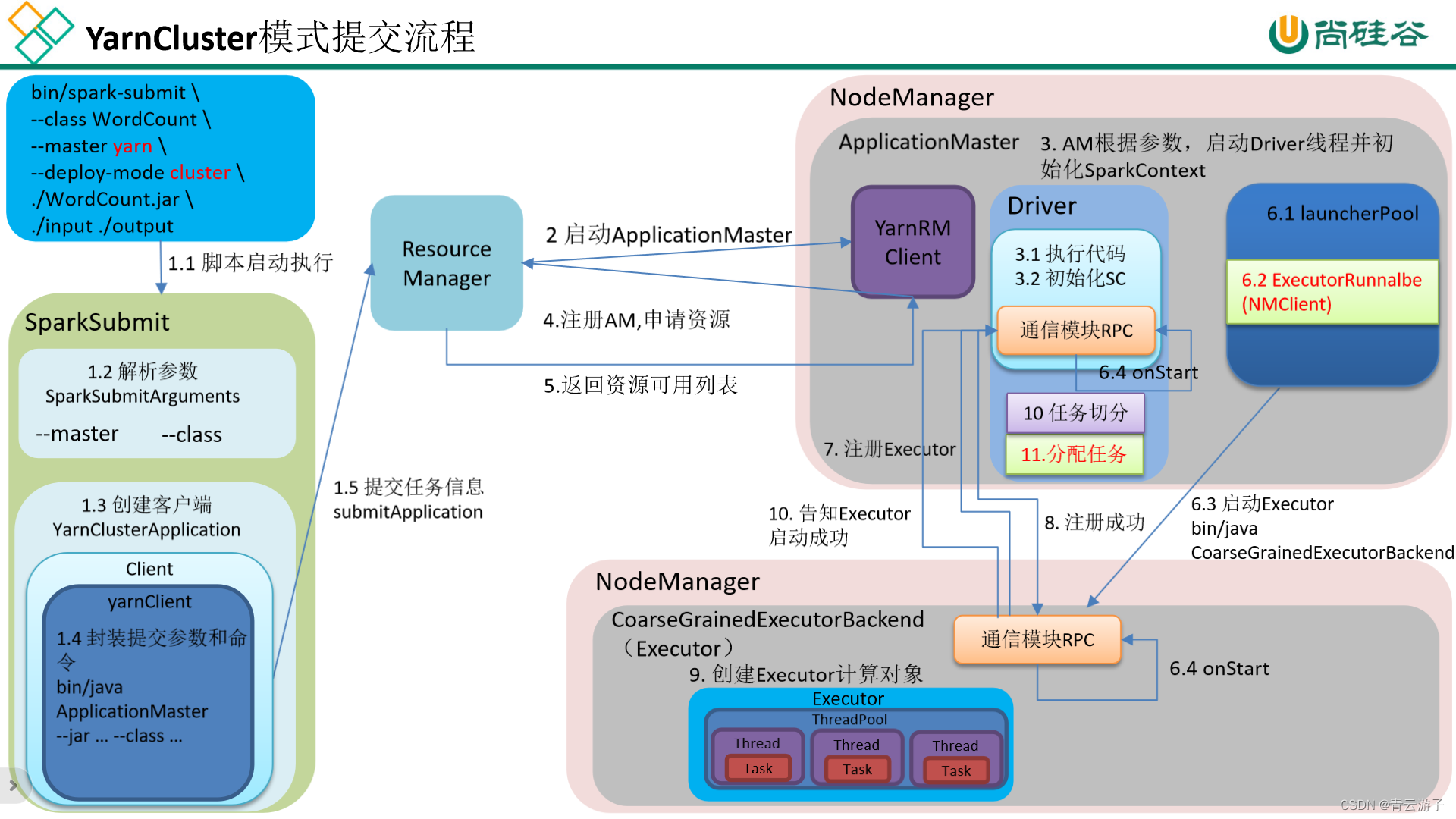
图2 新建ros.asc 将以下内容复制进剪切板(如下图)
保存后,关闭gedit。 然后使用命令:sudo apt-key add ros.asc 添加新的密钥。 终端会显示OK,这时表示添加成功。 国外镜像下载速度很慢,需要更换国内镜像。 再次在终端输入: sudo apt update 问题得到解决。
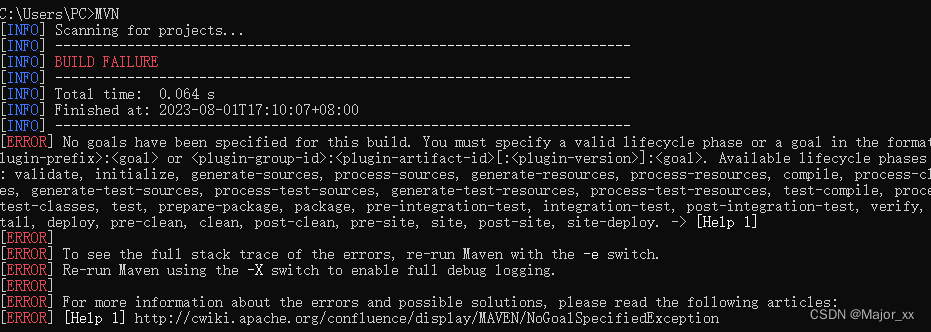
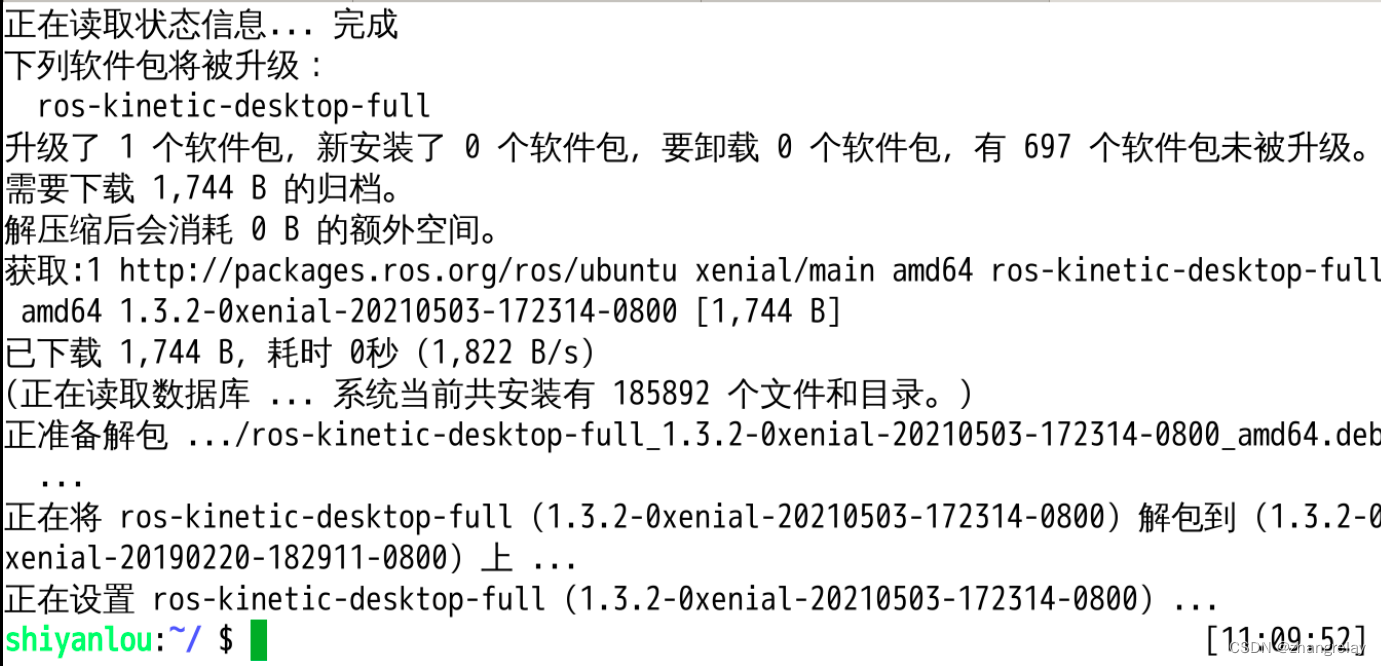
图3 正常更新截图 例二:更新软件包:sudo apt install ros-kinetic-desktop-full (如下图)
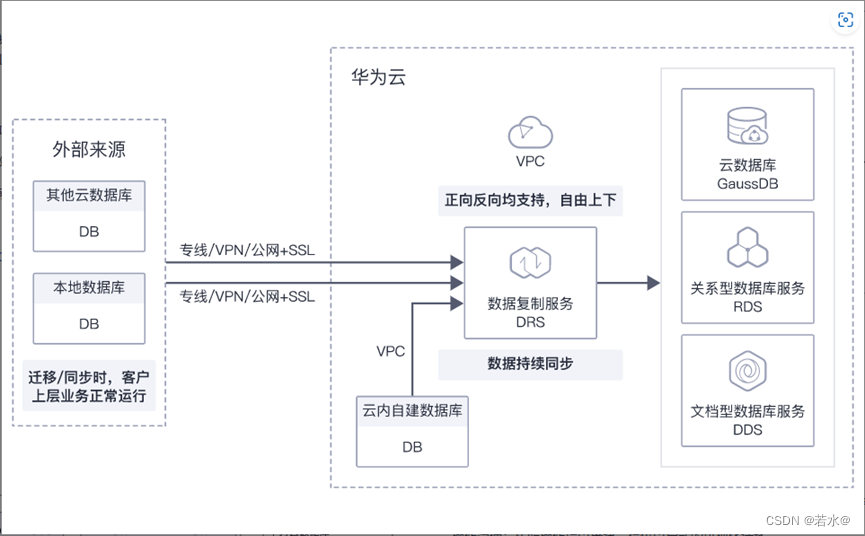
图4 完成ros-kinetic-desktop-full的升级 | ||||
| 思考题(30分): 1、sudo apt update没有公钥问题如上解决方式(参考例一) 2、ros2未配置的话: ros2:未找到命令 解决方法:source /opt/ros/ardent/setup.zsh 然后再次输入ros2问题得到解决
答:ROS1和ROS2是两个不同的机器人操作系统。ROS1是第一个版本,已经存在了十多年,而ROS2是在ROS1的基础上进行了改进和升级。ROS2具有更好的实时性、可靠性、安全性和可扩展性,同时还支持多种平台和编程语言。ROS2还引入了一些新的概念和工具,例如DDS(Data Distribution Service)和Colcon(构建工具)。总之,ROS2是一个更加先进和强大的机器人操作系统,可以满足更多的需求。
答:FANUC是一家机器人制造商,他们可以使用ROS驱动来控制他们的机器人。ROS是一个开源的机器人操作系统,它提供了一个框架来编写机器人应用程序。FANUC可以使用ROS来控制他们的机器人,这样就可以使用ROS提供的各种功能来编写机器人应用程序。例如,使用ROS可以轻松地实现机器人的自主导航、物体识别和抓取等功能。此外,FANUC还提供了一些ROS驱动程序,这些驱动程序可以帮助用户轻松地将FANUC机器人集成到ROS系统中。 | ||||




AI:
蓝桥云课ROS机器人实验报告01入门大纲可能包括以下内容:
- ROS基本概念和安装:介绍ROS的概念、特点、组成部分、安装步骤等。
- ROS环境配置:介绍如何配置ROS环境,包括设置工作空间、源代码路径、ROS包管理等。
- ROS命令行工具:介绍ROS提供的命令行工具,如roscore、rosrun、roslaunch等,以及如何使用这些工具来运行ROS程序。
- ROS消息传递:介绍ROS中的消息传递机制,包括话题、服务、参数服务器等,并介绍如何使用这些机制进行程序间通信。
- ROS节点和图示:介绍ROS中的节点和图示,并介绍如何创建和使用节点和图示。
- ROS编程实践:通过一个具体的ROS程序,介绍如何编写ROS程序,包括创建ROS包、编写ROS节点、编写ROS消息等。
- ROS机器人控制:介绍如何使用ROS控制机器人,包括控制机器人的运动、传感器数据采集等。
- ROS机器人编程实践:通过一个具体的机器人的控制程序,介绍如何编写ROS控制机器人的程序。
以上是蓝桥云课ROS机器人实验报告01入门大纲的一个大致框架,具体内容可能会根据实验的目的和实际情况进行调整。
如果您在运行 sudo apt update 时遇到了公钥问题,可以尝试以下解决方法:
-
确保您的系统上安装了
apt-transport-https包。可以使用以下命令检查是否安装:
shell
sudo apt-get install apt-transport-https |
如果未安装,则会安装该包。
2. 确保您的软件源列表中包含正确的公钥。可以使用以下命令检查:
bash
sudo apt-key finger | grep -i "key id" |
这将列出您系统上已安装的公钥。如果缺少您需要的公钥,请添加它。例如,如果您的软件源列表中包含官方 Ubuntu 软件源,请使用以下命令添加公钥:
bash
sudo apt-key adv --fetch-keys 'https://cloud.archive.ubuntu.com/ubuntu/gpg' |
-
如果您使用的不是 Ubuntu 系统,则需要替换为您的发行版的软件源。
-
如果您的软件源列表中的公钥仍然无法验证,请尝试将其删除并重新添加。例如,如果您使用的的是官方 Ubuntu 软件源,请使用以下命令删除公钥:
bash
sudo apt-key adv --recv-keys --keyserver hkp://keyserver.ubuntu.com:80 'AAED4DF2E4060A83' |
然后重新添加:
bash
sudo apt-key adv --fetch-keys 'https://cloud.archive.ubuntu.com/ubuntu/gpg' |
- 最后,运行
sudo apt update命令以更新软件源列表并尝试再次安装软件包。
希望这些方法能够帮助您解决公钥问题。
工业机械臂可以使用ROS(机器人操作系统)驱动来实现自动化任务。以下是一些使用ROS驱动工业机械臂的步骤:
- 安装机器人驱动程序:将机械臂连接到计算机上,并安装适用于该机械臂的ROS驱动程序。这些驱动程序通常可在ROS软件包管理器中下载。
- 配置ROS环境:在计算机上设置ROS环境,包括设置工作空间、源代码路径、ROS包管理等。
- 创建ROS节点:创建一个ROS节点来控制机械臂。该节点将使用ROS消息进行通信,并与机械臂的驱动程序交互。
- 定义机器人的运动学模型:使用ROS的的运动学模型库定义机械臂的运动学模型。这有助于机械臂在执行任务时进行运动规划和姿态控制。
- 编写控制程序:使用ROS的编程语言(如Python)编写控制程序,以实现机械臂的运动控制和任务执行。
- 调试和测试:通过ROS的调试工具对程序进行测试和调试,确保机械臂可以按照预期执行任务。
总之,使用ROS驱动工业机械臂可以实现机械臂的自动化和控制,提高生产效率和精度。
ROS机器人安装的核心要点如下:
- 确保你的系统上安装了ROS,并设置了正确的环境变量。
- 配置软件源,以便下载和安装ROS软件包。
- 安装必要的ROS软件包,例如ROS Kinetic或ROS Melodic。
- 配置机器人硬件设备的驱动程序,并确保硬件设备正确连接。
- 创建ROS工作空间,并在其中创建机器人模型的描述文件。
- 编写机器人的控制程序,并使用ROS命令行工具运行程序。
- 配置ROS参数服务器和消息传递机制,以便程序之间进行通信。
- 调试和测试机器人的控制程序,确保机器人可以按照预期执行任务。
以上是ROS机器人安装的核心要点,根据不同的机器人硬件设备和控制需求,具体步骤可能会有所不同。