在实体小车上跑rtabmap算法,在rviz上订阅 /rtabmap/mapData 话题时不显示建图信息并且报错:
[ERROR] [xxxxxxxx]: Client [/rviz] wants topic /rtabmap/mapData to have datatype/md5sum [rtabmap/mapData/xxxxxxxxxxxxx], but our version has [rtabmap/mapData/xxxxxxxxxxxx]. Dropping connection.
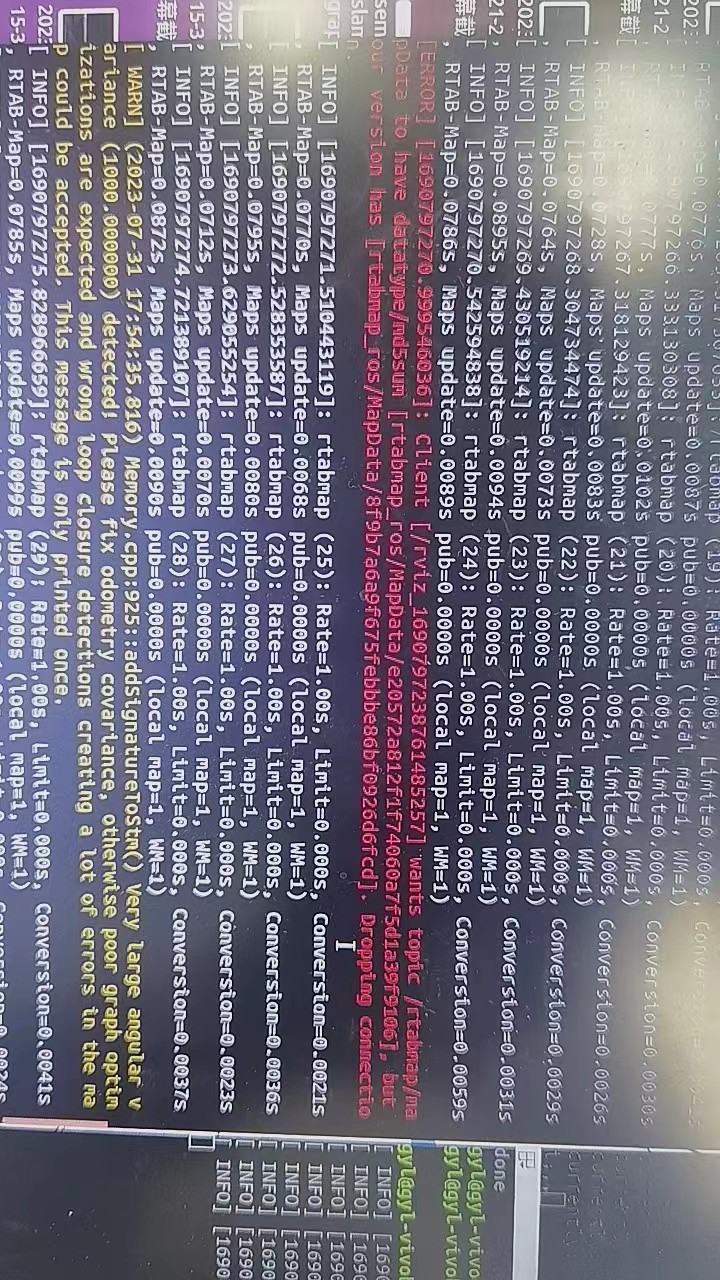
报错原因是因为ubuntu和小车上的rtabmap版本不一致
解决方法:
- 检查rtabmap版本命令:
sudo nano /opt/ros/melodic/share/rtabmap_ros/package.xml
分别在ssh登录后的小车端和本地端运行以上命令,对比两者rtabmap版本是否一致 - 如果不一致,联网更新低版本的rtabmap,更新命令:
sudo apt-get install ros-melodic-rtabmap*
我的是小车上的版本更低,所以将小车外接显示屏,然后联网更新