文章目录
- openpnp - Enable Visual Homing
- 概述
- 笔记
- 视觉归零设置
- END
openpnp - Enable Visual Homing
概述
设备已经完全通过openpnp的校验了.
当时发现一个问题, 视觉归零如果使能, 就会使主校准点和次校准点的位置发生变化, 导致顶部相机十字不能准确的落在主/次校准点上.
当时就将视觉归零禁掉了.
今天在看同学给的第三方的资料, 突然发现, 人家的视觉归位咋那么好使呢? 找了一下原因, 搞定.
笔记
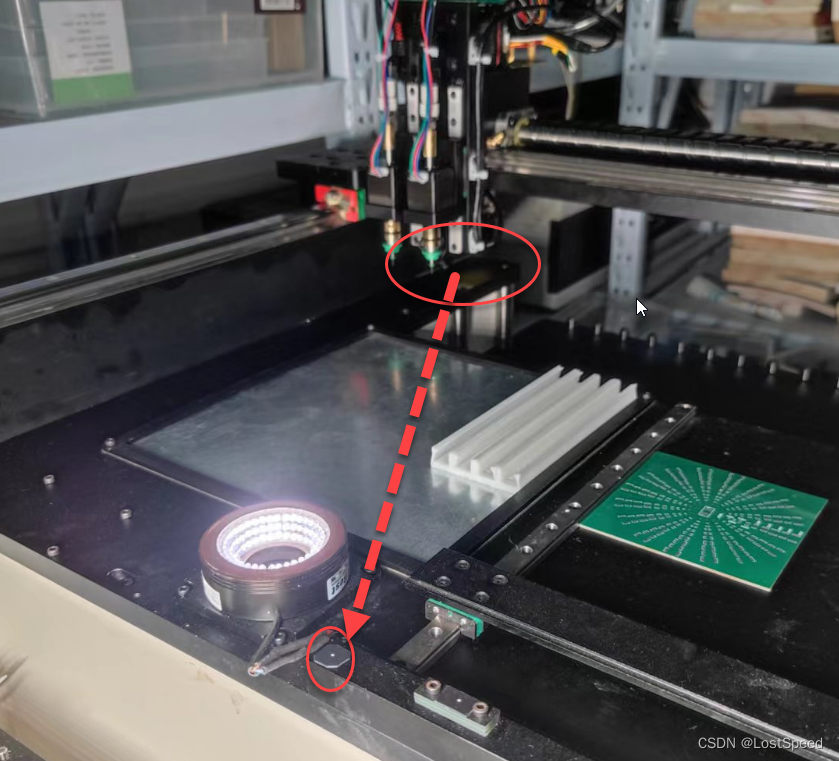
视觉归零的目的: 为了防止机械归零偶尔会有0.xmm的误差, 就在机械归零的顶部相机十字下面很近的地方放一个基准点(直径1mm左右), 当机械归零完成后, 再移动很短的距离, 来找这个视觉上的归零基准点. 这样就可以避免X/Y行程光电开关形成的微小的归零误差.
我自己玩时, 是在主基准点附近, 贴了一个基准点, 但是这个点离机械零点太远了. 导致视觉归零不好使(不是每次都好使, 好像还会引起主次基准点位置变化了, 无法准确走到主/次基准点)
观察第三方好使的视觉归零, 人家是在机械归零位置很近的地方(大概方圆50mm之内).
那我也在机械归零位置附近, 找个能贴基准点的位置试试.
看了一下, 由于机械设计的原因, 机械归零后, 顶部相机十字附近, X正向 + Y正向附近, 有个几mm的空间可以贴基准点.
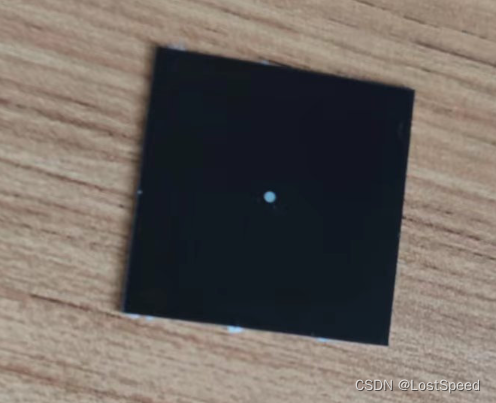
以前定制了好多印刷版的基准点(黑色亚光塑料皮带背胶, size = 30mm x 30mm, 中间带1个1mm直径的白色的实心圆形)
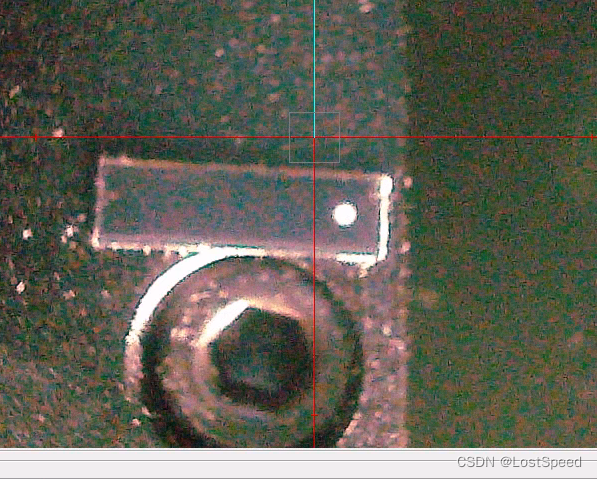
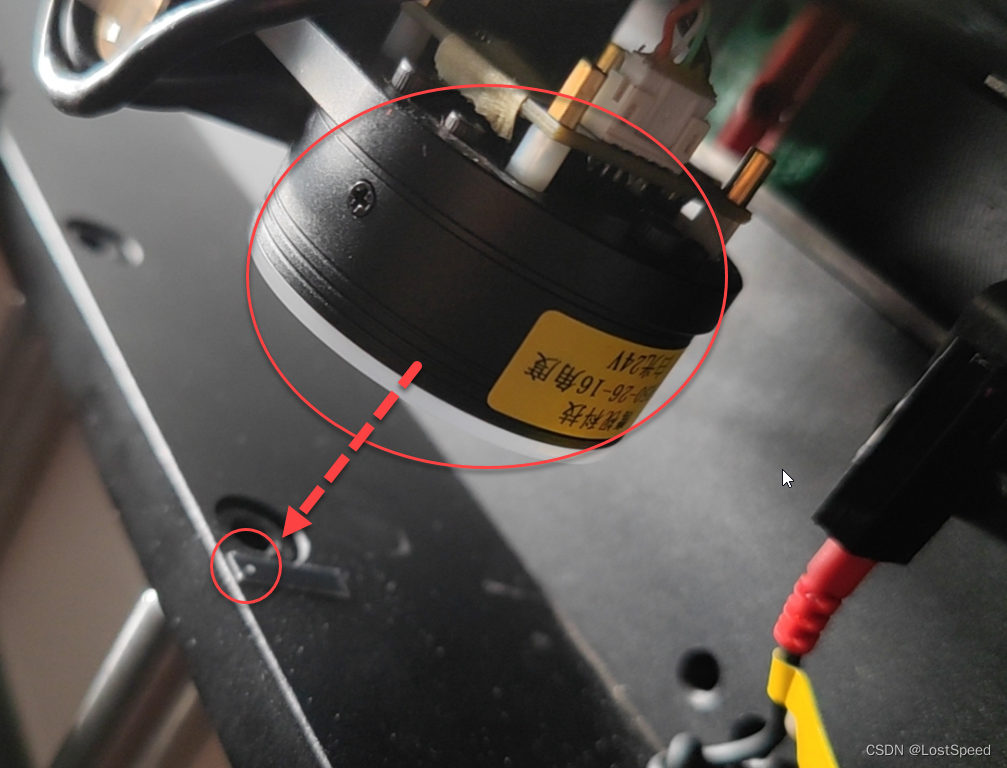
用剪刀切了一块长方形的印刷版的基准点(长15mm, 宽4mm), 将白色的实心基准点留在长方形的一边, 然后贴在归零位置相机十字的X正向/Y正向几mm的地方.
视觉归零设置
前2天, 已经将设备校验过了(连续从头校验了3次, 都是一次性校验通过), 然后备份了配置文件.
这时, 想加入视觉归位, 不想从头来一次了(从头校验一次, 得1~2个小时). 先试试在当前备份的配置文件上加入视觉归位, 实在不行再从头弄.
将禁止掉的视觉归位重新reopen.
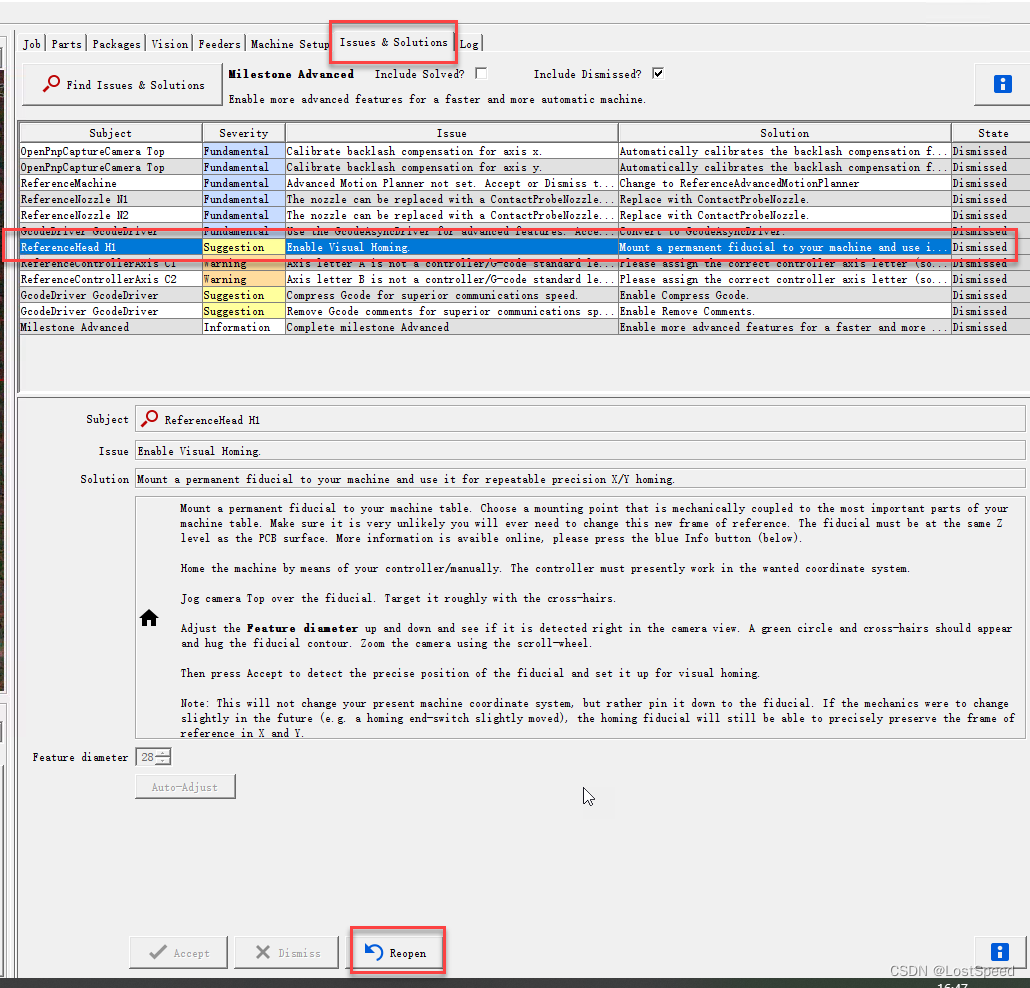
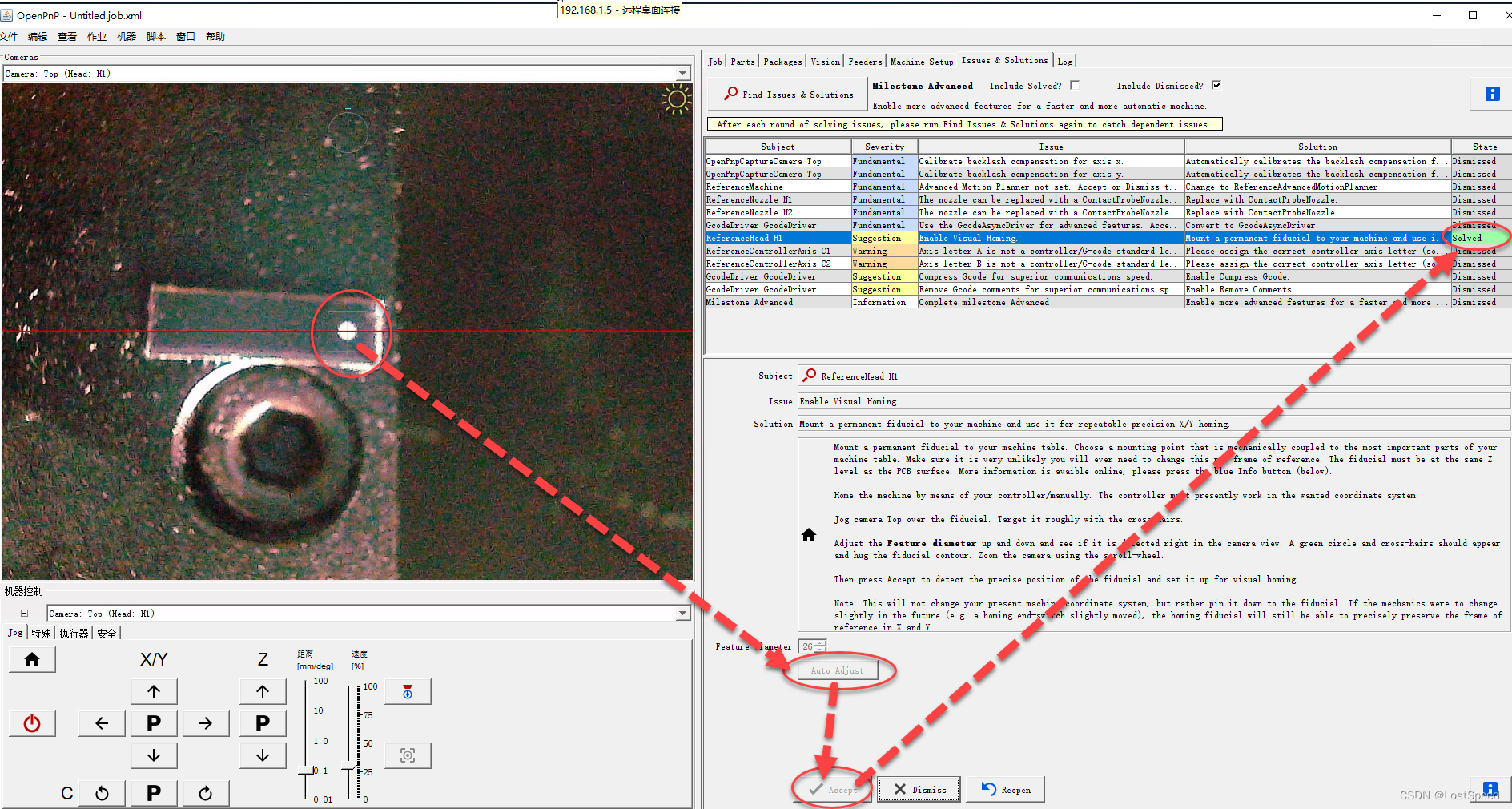
将相机十字定位到新贴上的视觉基准点上, 然后自动搜索目标, 然后接受.
去机器设置中去看视觉归零的设置结果.
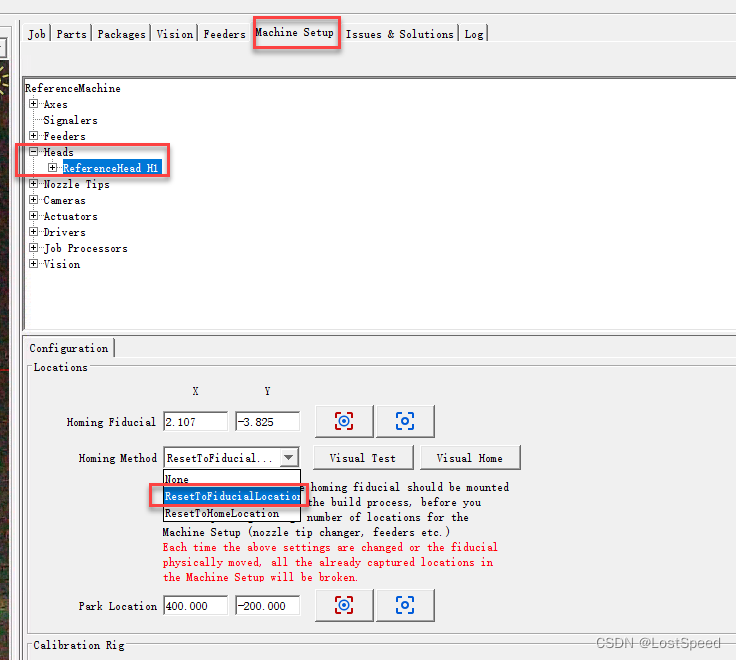
可以看到, 归零方法已经由None自动改为了ResetToFiducialLocation.
此时可以将顶部相机移动到其他位置, 然后按下按钮Visual Test/Visual Home, 可以看到视觉归位都好使, 也没有影响主次基准点的坐标位置.
看来视觉归零基准点要设置在机械归零位置附近很近的地方才行.
这时, 再执行归零按钮, 会先机械归零, 然后再视觉归零, 最后停在视觉归零基准点的位置.





![无涯教程-jQuery - outerWidth( margin])方法函数](https://www.learnfk.com/guide/images/wuya.png)