原文链接:https://mp.weixin.qq.com/s?__biz=Mzg4MjgxMjgyMg==&mid=2247486550&idx=1&sn=98bf915a047bd4312f9eddad3d47d705&chksm=cf51beaff82637b90b37bc9c17addade80cb13ffef8edcb71a57e5b3c735b44fcf6776f0a957#rd
arxiv 2023 | 4D Millimeter-Wave Radar in Autonomous Driving: A Survey
毫米波雷达论文阅读笔记: arxiv 2023, 4D Millimeter-Wave Radar in Autonomous Driving: A Survey

Abstract
-
动机
-
4D毫米波雷达有诸多优势:
✅ 能够测量目标的距离、方位角、仰角和速度
✅ 鲁棒性强 -
问题:尽管4D毫米波雷达研究快速发展
❌ 但目前还缺乏对该主题的调研总结
-
-
本文目标
- 填补这一空白
- 促进该领域未来研究
-
本文内容
-
回顾4D毫米波雷达的理论背景和发展进展
✅ 信号处理流程
✅ 分辨率提升方法
✅ 外参标定过程
✅ 点云生成方法
-
介绍 4D毫米波雷达在 环境感知和定位与映射任务中的数据集和应用算法
-
4D毫米波雷达领域的 未来发展趋势
-
-
本文贡献
- 第一篇关注自动驾驶中的4D毫米波雷达的综述
- 详细介绍4D毫米波雷达的理论背景和信号处理流程
- 详尽综述了4D毫米波雷达在自动驾驶中的应用算法,包括感知、定位和建图
1 INTRODUCTION
背景:毫米波雷达在自动驾驶中 应用前景大
-
自动驾驶
- 目的:提供安全、便捷、舒适的交通体验
- 环境感知、定位和映射能力至关重要
-
传感器
- 摄像头
- 激光雷达
- 毫米波雷达
-
毫米波雷达优势
- 体积小、成本低
- 全天候工作
- 速度测量能力强
- 距离分辨率高等
-
4D毫米波雷达
- 可以测量四类目标信息:距离,方位角,俯仰角,速度
本文动机:
- 尽管4D毫米波雷达快速发展,但几乎没有专门的综述文章
本文贡献
- 第一篇关注自动驾驶中的4D毫米波雷达的综述
- 详细介绍4D毫米波雷达的理论背景和信号处理流程
- 详尽综述了4D毫米波雷达在自动驾驶中的应用算法,包括感知、定位和建图
章节安排
- section 2:
- 介绍4D毫米波雷达的基本理论
- 信号处理流程
- 数据格式
- 提高分辨率的方法
- section 3:
- 概述外参标定算法
- section 4:
- 总结基于学习的点云生成算法
- section 5:
- 总结常用的4D毫米波雷达数据集
- section 6:
- 回顾4D毫米波雷达在感知中的应用
- 仅基于4D雷达的方法
- 多模态方法
- section 7:
- 介绍4D毫米波雷达在定位和映射中的应用
- 里程计、重定位、SLAM
- section 8:
- 讨论未来发展趋势
- section 9: conclusion
2 BACKGROUND OF 4D MMWAVE RADARS
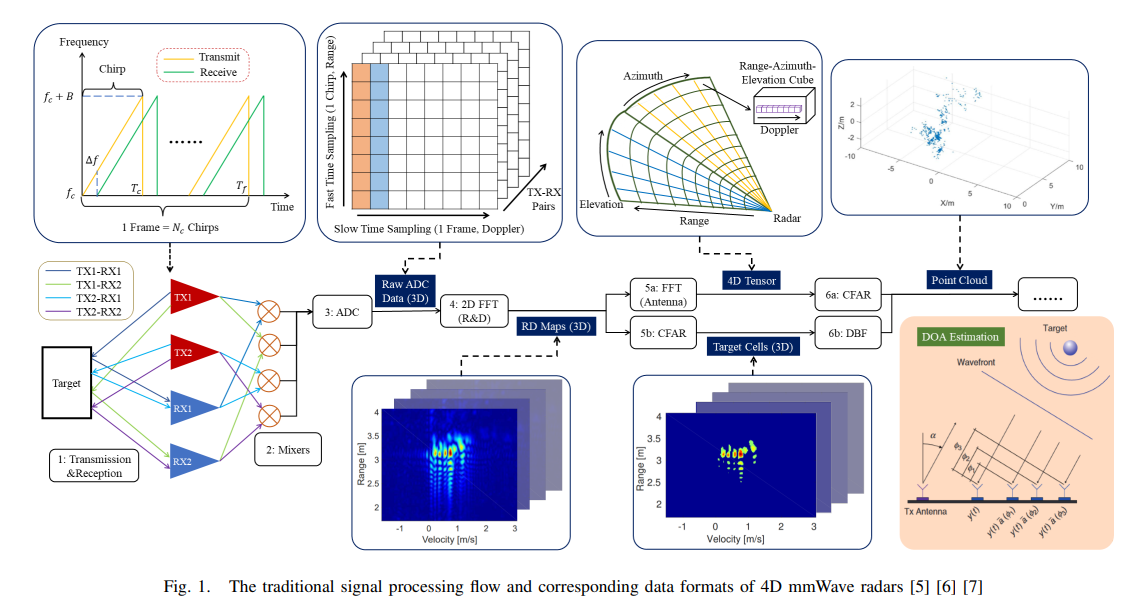
2.A Signal Processing Flow
- step 1: 发射接收信号
- step 2: 混频
- step 3: ADC获取 raw ADC 数据
- step 4: 2D FFT生成 range-doppler 图
- step 5: CFAR
- step 6: 2D AOA
-
DBF等
-
2.B Methods to Improve Resolution
- 硬件层面
-
增加发射-接收对数量
✅ 级联:级联多个雷达芯片增加对数
-
集成更多天线于一芯片
-
扩大天线孔径
-
超材料:控制大小的同时显著提高角分辨率
-
- 软件层面
- 虚拟实现硬件改进
- 优化信号处理算法
- 虚拟孔径成像:扩大虚拟天线孔径提高角分辨率
- 超分辨率:用创新算法(e.g., 基于学习的算法)替代传统FFT等信号处理方法
3. EXTRINSIC CALIBRATION
-
雷达点云噪声大, 外参标定具有挑战性
- 高分辨率缓解了问题,但仍缺乏足够鲁棒的在线标定方法
-
传统方法
-
使用角反
✅ 分析感知结果
✅ 与激光雷达、摄像头数据比较
✅ 标定外参
-
-
最新方法
-
不需要专门放置角反
✅ 利用雷达运动测量自标定
✅ 或雷达与摄像头对标定
-
方便实用,但在极端天气下的验证有待实现
-
4 LEARNING-BASED RADAR POINT CLOUD GENERATION
- 雷达点云稀疏的一个主要原因是CFAR导致的信息损失
- 越来越多基于学习的方法被提出以替代CFAR
- 也有方法 直接处理RD图或4D张量
- 改善点云质量 + 提高下游任务(如感知和定位)性能
- CFAR类型方法的问题
- 实际目标形状各异并占据多个单元
- 会导致遮挡效应、分辨率下降、信息损失
- 代表性方法
-
DRD net
✅ 首次将CNN应用于RD图目标检测
✅ 将其形象化为分割任务
-
基于U-Net、GAN的网络
✅ 使用激光雷达点云作为监督
✅ 生成更少杂点、更密集的真目标点云
-
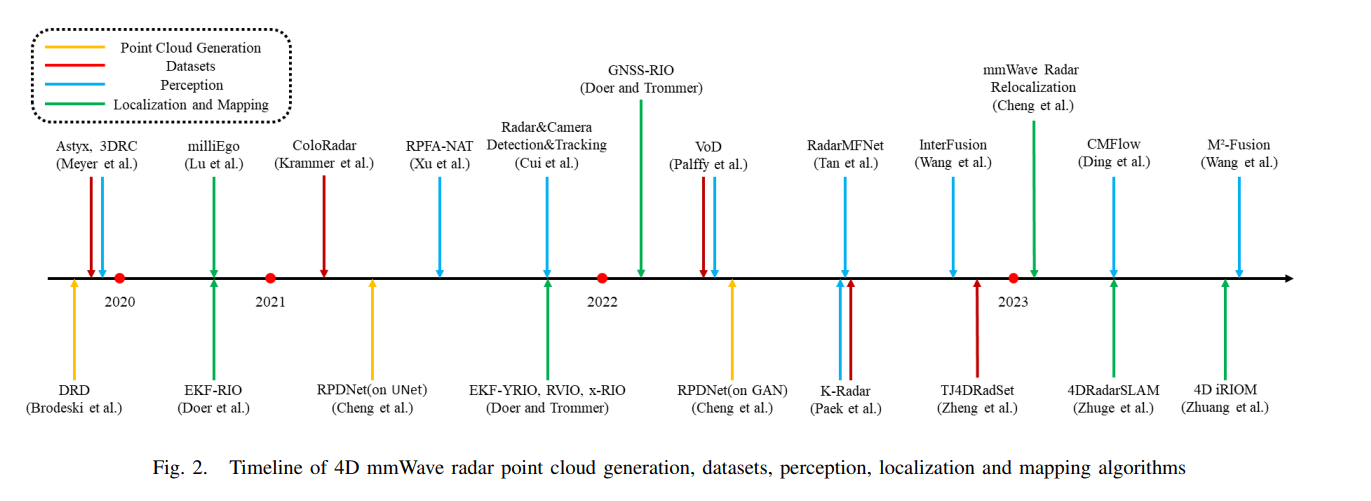
5 DATASETS
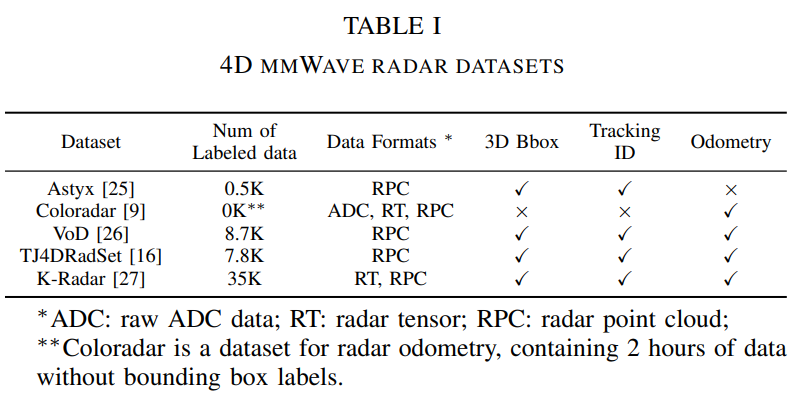
- 公开数据集对相关算法研究至关重要
- 目前公开的4D雷达数据相对较少
- 代表性数据集
- Astyx
- 首个数据集
- 500帧同步数据,3000标注
- Coloradar
- 定位和映射研究数据集
- 2小时数据,不同处理形式
- VoD
- 多传感器数据集,用于3D目标检测
- 8693帧,12万标注
- TJ4DRadSet
- 7757帧,丰富场景
- K-Radar
- 目前最大数据集,3.5万帧
- 提供4D雷达张量
- 模块化的网络训练代码
- Astyx
- 相比视觉和激光雷达,4D雷达数据量仍不足
6 PERCEPTION APPLICATIONS
介绍在下游感知任务上的应用
6.A 4D-Radar-only Methods
- 自然地来自于 基于激光雷达的方法
- 但仍需要特定网络设计应对稀疏性和噪声
- 3D检测
- CNN-based:PointPillars等
- Transformer-based:应对稀疏嘈杂数据
- 场景流估计
-
将方法从其他模态转移到4D雷达
-
代表性方法
✅ 利用车辆传感冗余进行跨模态学习, 解决标注难题
-
6.B Fusion Methods
- 4D雷达可以提供点云信息
- 与摄像头或激光雷达融合进行目标检测
- 以提高模型精度和鲁棒性
- 主要是特征级融合
- 4DRV融合
-
4D雷达提供深度、速度信息弥补摄像头不足
-
通常将雷达信号转换为图像特征
-
代表性方法
✅ 生成鸟瞰图和前视图
✅ 动态适配不同模态融合
-
优于仅摄像头方法
-
- 4DRL融合
-
激光雷达近距离精确,雷达远距离检测
-
有望成为低成本高质量技术解决方案
-
代表性方法
✅ 交互提升两模态特征表达
✅ 多尺度融合

-
7 LOCALIZATION AND MAPPING APPLICATIONS
在定位和建图方面的应用
7.A Odometry
- 定位的核心,SLAM的重要组成部分
- 4D毫米波雷达相关研究广泛
- 但稀疏性和噪声影响,通常需要IMU帮助
- 代表性方法
- EKF框架
- 融合雷达点云速度估计和IMU
- 实现雷达惯性测距
- 基于学习
- CNN和RNN特征提取和融合
- 输出6自由度测距
- 存在的问题
- EKF可能难以应对大规模环境
- 曼哈顿世界假设可能限制适用性
- EKF框架
7.B Relocalization
- 依赖高精度的在线映射
- 在闭环检测时很重要
- 雷达点云噪声和稀疏影响重定位
- 代表性方法
- 数据增强
- 融合多帧、删除运动目标
- 提取每个点的特征
- 将当前扫描与全局地图比较
- 实现重定位
- 数据增强
7.C SLAM
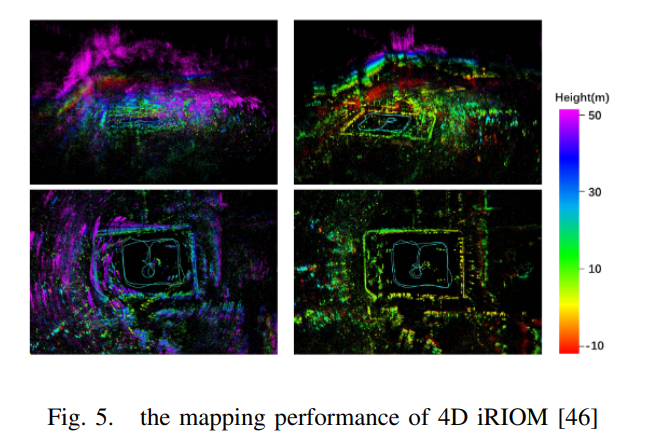
- Odometry + Relocalization 是SLAM必不可少的部分
- 最近出现 4D毫米波雷达SLAM相关研究
- 基于迭代EKF的4D毫米波雷达点云 SLAM
- 基于lidar方法的毫米波SLAM系统
- 在极端环境下也可工作
8 FUTURE TRENDS
- 点云增强
- 提高点云质量
- 基于学习的方法替代CFAR
- 算法重新设计
- 从其他模态转移的算法可能不够理想
- 需要考虑4D雷达特性
- 利用更原始数据
- 原始ADC、RD图、4D张量
- 实时性和信息利用是挑战
- 数据集扩充
- 更多包含4D雷达的数据集
- 丰富数据格式和场景
9 CONCLUSION
- 本文回顾了4D毫米波雷达在自动驾驶中的应用
- 内容包括
- 4D毫米波雷达的信号处理流程
- 提高其分辨率的方法
- 外参标定过程
- 基于学习的点云生成算法
- 总结了4D毫米波雷达数据集
- 在环境感知和定位与映射任务中的应用算法
- 未来可能的发展方向
首篇系统综述 4D毫米波雷达在自动驾驶领域的应用








![[安洵杯-不是文件上传]代码审计+文件上传+insert注入](https://img-blog.csdnimg.cn/img_convert/061db792241bdf494e8c596ba9ef41d2.png)