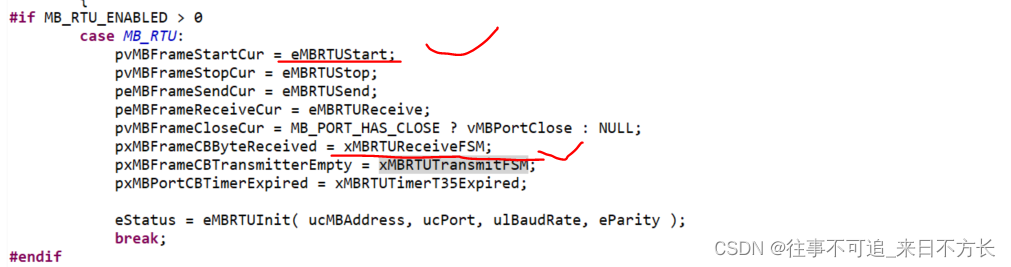
void
eMBRTUStart( void )
{
ENTER_CRITICAL_SECTION( );
/* Initially the receiver is in the state STATE_RX_INIT. we start
* the timer and if no character is received within t3.5 we change
* to STATE_RX_IDLE. This makes sure that we delay startup of the
* modbus protocol stack until the bus is free.
*/
eRcvState = STATE_RX_INIT;
vMBPortSerialEnable( TRUE, FALSE );
vMBPortTimersEnable( );
EXIT_CRITICAL_SECTION( );
}
2.协议栈接收状态机
BOOL
xMBRTUReceiveFSM( void )
{
BOOL xTaskNeedSwitch = FALSE;
UCHAR ucByte;
assert( eSndState == STATE_TX_IDLE );
/* Always read the character. */
( void )xMBPortSerialGetByte( ( CHAR * ) & ucByte );
switch ( eRcvState )
{
/* If we have received a character in the init state we have to
* wait until the frame is finished.
*/
case STATE_RX_INIT:
vMBPortTimersEnable( );
break;
/* In the error state we wait until all characters in the
* damaged frame are transmitted.
*/
case STATE_RX_ERROR:
vMBPortTimersEnable( );
break;
/* In the idle state we wait for a new character. If a character
* is received the t1.5 and t3.5 timers are started and the
* receiver is in the state STATE_RX_RECEIVCE.
*/
case STATE_RX_IDLE:
usRcvBufferPos = 0;
ucRTUBuf[usRcvBufferPos++] = ucByte;
eRcvState = STATE_RX_RCV;
/* Enable t3.5 timers. */
vMBPortTimersEnable( );
break;
/* We are currently receiving a frame. Reset the timer after
* every character received. If more than the maximum possible
* number of bytes in a modbus frame is received the frame is
* ignored.
*/
case STATE_RX_RCV:
if( usRcvBufferPos < MB_SER_PDU_SIZE_MAX )
{
ucRTUBuf[usRcvBufferPos++] = ucByte;
}
else
{
eRcvState = STATE_RX_ERROR;
}
vMBPortTimersEnable( );
break;
}
return xTaskNeedSwitch;
}
3.时间中断函数
BOOL
xMBRTUTimerT35Expired( void )
{
BOOL xNeedPoll = FALSE;
switch ( eRcvState )
{
/* Timer t35 expired. Startup phase is finished. */
case STATE_RX_INIT:
xNeedPoll = xMBPortEventPost( EV_READY );
break;
/* A frame was received and t35 expired. Notify the listener that
* a new frame was received. */
case STATE_RX_RCV:
xNeedPoll = xMBPortEventPost( EV_FRAME_RECEIVED );
break;
/* An error occured while receiving the frame. */
case STATE_RX_ERROR:
break;
/* Function called in an illegal state. */
default:
assert( ( eRcvState == STATE_RX_INIT ) ||
( eRcvState == STATE_RX_RCV ) || ( eRcvState == STATE_RX_ERROR ) );
}
vMBPortTimersDisable( );
eRcvState = STATE_RX_IDLE;
return xNeedPoll;
}
【每日一题】142. 环形链表 II 142. 环形链表 II题目描述解题思路 142. 环形链表 II
题目描述
给定一个链表的头节点 head ,返回链表开始入环的第一个节点。 如果链表无环,则返回 null。
如果链表中有某个节点,可以通过连续跟踪 next 指针…
项目效果图:
项目描述:加载组建时,隐藏,鼠标滑动到指定区域的时候该菜单选中高亮,点击菜单跳转到指定模块,每个页面都适用。
html 部分:
提示:我这里有英文所以有$i18n.localezh…