一、说明
- 第1条:点云处理简介
- 文章2:在Python中从深度图像估计点云
- 文章3:了解点云:使用Python实现地面检测
- 文章4:Python中的点云过滤
- 文章 5 : Python 中的点云分割
二. 深度图像
深度图像(也称为深度图)是每个像素提供其相对于传感器坐标系的距离值的图像。深度图像可以通过结构光或飞行时间传感器捕获。为了计算深度数据,结构光传感器(如 Microsoft Kinect V1)会比较投影光和接收光之间的失真。至于像Kinect V2 Microsoft这样的飞行时间传感器,它们投射光线,然后计算投影和接收这些光线之间的时间。
除了深度图像外,一些传感器还提供相应的RGB图像以形成RGB-D图像。后者使得计算彩色点云成为可能。本教程将使用Microsoft Kinect V1 RGB-D 图像作为示例。
让我们从导入库开始:
import imageio.v3 as iio
import numpy as np
import matplotlib.pyplot as plt
import open3d as o3d现在,我们可以导入深度图像并打印其分辨率和类型:
# Read depth image:
depth_image = iio.imread('data/depth.png')
# print properties:
print(f"Image resolution: {depth_image.shape}")
print(f"Data type: {depth_image.dtype}")
print(f"Min value: {np.min(depth_image)}")
print(f"Max value: {np.max(depth_image)}")Image resolution: (480, 640)
Data type: int32
Min value: 0
Max value: 2980
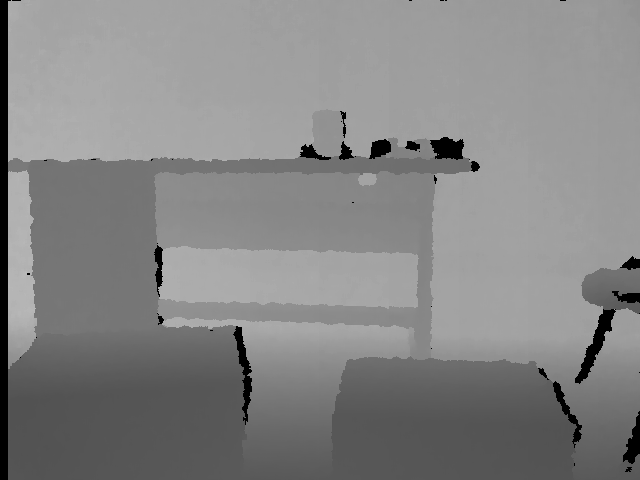
深度图像是大小为 640×480 的矩阵,其中每个像素是一个 32(或 16)位整数,表示以毫米为单位的距离,因此深度图像在打开时显示为黑色(见下图)。最小值 0 表示噪点(没有距离),而最大值 2980 表示最远像素的距离。

由 Microsoft Kinect V1 生成的深度图像。
为了获得更好的可视化效果,我们计算其灰度图像:
depth_instensity = np.array(256 * depth_image / 0x0fff, dtype=np.uint8)
iio.imwrite('output/grayscale.png', depth_instensity) 计算灰度图像意味着将深度值缩放到 。现在图像更清晰了:[0, 255]
计算出的灰度图像。黑色像素表示噪点。
请注意,Matplotlib 在可视化深度图像时也会做同样的事情:
# Display depth and grayscale image:
fig, axs = plt.subplots(1, 2)
axs[0].imshow(depth_image, cmap="gray")
axs[0].set_title('Depth image')
axs[1].imshow(depth_grayscale, cmap="gray")
axs[1].set_title('Depth grayscale image')
plt.show()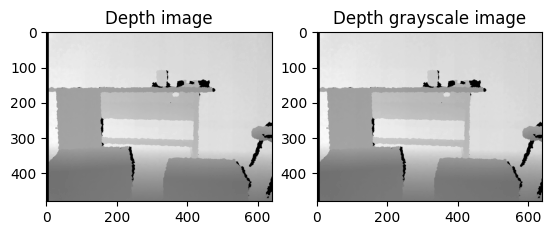
三. 点云
现在我们已经导入并显示了深度图像,我们如何从中估计点云?第一步是校准深度相机以估计相机矩阵,然后使用它来计算点云。获得的点云也称为2.5D点云,因为它是根据2D投影(深度图像)而不是激光传感器等3D传感器估计的。
3.2 深度相机校准
校准相机意味着通过查找失真系数和相机矩阵(也称为固有参数)来估计镜头和传感器参数。一般来说,校准相机有三种方法:使用工厂提供的标准参数、使用校准研究中获得的结果或手动校准 Kinect。手动校准相机包括应用一种校准算法,例如棋盘算法[1]。该算法在机器人操作系统(ROS)和OpenCV中实现。校准矩阵 M 是一个 3×3 矩阵:

其中fx,fy和cx,cy分别是焦距和光学中心。在本教程中,我们将使用获得的纽约大学深度 V2 数据集的结果:
# Depth camera parameters:
FX_DEPTH = 5.8262448167737955e+02
FY_DEPTH = 5.8269103270988637e+02
CX_DEPTH = 3.1304475870804731e+02
CY_DEPTH = 2.3844389626620386e+02如果您想自己校准相机,可以参考此OpenCV教程。
3.3 点云计算
这里的计算点云是指将深度像素从深度图像2D坐标系转换为深度相机3D坐标系(x,y和z)。3D 坐标使用以下公式 [2] 计算,其中 depth(i, j) 是行 i 和列 j 处的深度值:
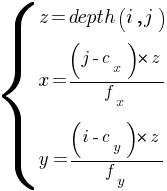
该公式应用于每个像素:
# compute point cloud:
pcd = []
height, width = depth_image.shape
for i in range(height):
for j in range(width):
z = depth_image[i][j]
x = (j - CX_DEPTH) * z / FX_DEPTH
y = (i - CY_DEPTH) * z / FY_DEPTH
pcd.append([x, y, z])让我们使用 Open3D 库显示它:
pcd_o3d = o3d.geometry.PointCloud() # create point cloud object
pcd_o3d.points = o3d.utility.Vector3dVector(pcd) # set pcd_np as the point cloud points
# Visualize:
o3d.visualization.draw_geometries([pcd_o3d])
从深度图像计算出的点云。
四. 彩色点云
如果我们想从RGB-D图像中计算彩色点云怎么办?颜色信息可以增强许多任务(如点云配准)的性能。在这种情况下,如果输入传感器也提供RGB图像,则最好使用它。彩色点云可以定义如下:
![]()
其中 x、y 和 z 是 3D 坐标,r、g 和 b 表示 RGB 系统中的颜色。
我们首先导入上一个深度图像的相应 RGB 图像:
# Read the rgb image:
rgb_image = iio.imread('../data/rgb.jpg')
# Display depth and grayscale image:
fig, axs = plt.subplots(1, 2)
axs[0].imshow(depth_image, cmap="gray")
axs[0].set_title('Depth image')
axs[1].imshow(rgb_image)
axs[1].set_title('RGB image')
plt.show()
深度图像及其对应的 RGB 图像
要查找深度传感器 3D 坐标系中定义的给定点 p(x, y,z) 的颜色,请执行以下操作:
1. 我们将其转换为 RGB 相机坐标系 [2]:
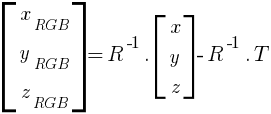
其中 R 和 T 是两个相机之间的外在参数:分别是旋转矩阵和平移矢量。
同样,我们使用来自纽约大学深度V2数据集的参数:
# Rotation matrix:
R = -np.array([[9.9997798940829263e-01, 5.0518419386157446e-03, 4.3011152014118693e-03],
[-5.0359919480810989e-03, 9.9998051861143999e-01, -3.6879781309514218e-03],
[- 4.3196624923060242e-03, 3.6662365748484798e-03, 9.9998394948385538e-01]])
# Translation vector:
T = np.array([2.5031875059141302e-02, -2.9342312935846411e-04, 6.6238747008330102e-04])RGB 照相机坐标系中的点计算方法如下:
"""
Convert the point from depth sensor 3D coordinate system
to rgb camera coordinate system:
"""
[x_RGB, y_RGB, z_RGB] = np.linalg.inv(R).dot([x, y, z]) - np.linalg.inv(R).dot(T)2. 使用 RGB 相机的固有参数,我们将其映射到彩色图像坐标系 [2]:

这些是获取颜色像素的索引。
请注意,在前面的公式中,焦距和光学中心是RGB相机参数。同样,我们使用来自纽约大学深度V2数据集的参数:
# RGB camera intrinsic Parameters:
FX_RGB = 5.1885790117450188e+02
FY_RGB = 5.1946961112127485e+02
CX_RGB = 3.2558244941119034e+0
CY_RGB = 2.5373616633400465e+02对应像素的指数计算如下:
"""
Convert from rgb camera coordinate system
to rgb image coordinate system:
"""
j_rgb = int((x_RGB * FX_RGB) / z_RGB + CX_RGB + width / 2)
i_rgb = int((y_RGB * FY_RGB) / z_RGB + CY_RGB)让我们把所有东西放在一起,显示点云:
colors = []
pcd = []
for i in range(height):
for j in range(width):
"""
Convert the pixel from depth coordinate system
to depth sensor 3D coordinate system
"""
z = depth_image[i][j]
x = (j - CX_DEPTH) * z / FX_DEPTH
y = (i - CY_DEPTH) * z / FY_DEPTH
"""
Convert the point from depth sensor 3D coordinate system
to rgb camera coordinate system:
"""
[x_RGB, y_RGB, z_RGB] = np.linalg.inv(R).dot([x, y, z]) - np.linalg.inv(R).dot(T)
"""
Convert from rgb camera coordinates system
to rgb image coordinates system:
"""
j_rgb = int((x_RGB * FX_RGB) / z_RGB + CX_RGB + width / 2)
i_rgb = int((y_RGB * FY_RGB) / z_RGB + CY_RGB)
# Add point to point cloud:
pcd.append([x, y, z])
# Add the color of the pixel if it exists:
if 0 <= j_rgb < width and 0 <= i_rgb < height:
colors.append(rgb_image[i_rgb][j_rgb] / 255)
else:
colors.append([0., 0., 0.])
# Convert to Open3D.PointCLoud:
pcd_o3d = o3d.geometry.PointCloud() # create a point cloud object
pcd_o3d.points = o3d.utility.Vector3dVector(pcd)
pcd_o3d.colors = o3d.utility.Vector3dVector(colors)
# Visualize:
o3d.visualization.draw_geometries([pcd_o3d])
从RGB-D图像计算出的彩色点云
五、代码优化
在本节中,我们将介绍如何优化代码,使其更高效并适合实时应用程序。
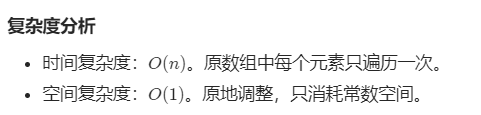
5.1 点云
使用嵌套循环计算点云非常耗时。对于分辨率为 480×640 的深度图像,在具有 8GB RAM 和 i7-4500 CPU 的机器上,计算点云大约需要 2.154 秒。
为了减少计算时间,嵌套循环可以用矢量化操作代替,计算时间可以减少到0.024秒左右:
# get depth resolution:
height, width = depth_im.shape
length = height * width
# compute indices:
jj = np.tile(range(width), height)
ii = np.repeat(range(height), width)
# rechape depth image
z = depth_im.reshape(length)
# compute pcd:
pcd = np.dstack([(ii - CX_DEPTH) * z / FX_DEPTH,
(jj - CY_DEPTH) * z / FY_DEPTH,
z]).reshape((length, 3))我们还可以通过在开始时计算一次常数来将计算时间减少到大约 0.015 秒:
# compute indices:
jj = np.tile(range(width), height)
ii = np.repeat(range(height), width)
# Compute constants:
xx = (jj - CX_DEPTH) / FX_DEPTH
yy = (ii - CY_DEPTH) / FY_DEPTH
# transform depth image to vector of z:
length = height * width
z = depth_image.reshape(height * width)
# compute point cloud
pcd = np.dstack((xx * z, yy * z, z)).reshape((length, 3))4.2 彩色点云
至于彩色点云,在同一台机器上,执行前面的示例大约需要 36.263 秒。通过应用矢量化,运行时间减少到 0.722 秒。
# compute indices:
jj = np.tile(range(width), height)
ii = np.repeat(range(height), width)
# Compute constants:
xx = (jj - CX_DEPTH) / FX_DEPTH
yy = (ii - CY_DEPTH) / FY_DEPTH
# transform depth image to vector of z:
length = height * width
z = depth_image.reshape(length)
# compute point cloud
pcd = np.dstack((xx * z, yy * z, z)).reshape((length, 3))
cam_RGB = np.apply_along_axis(np.linalg.inv(R).dot, 1, pcd) - np.linalg.inv(R).dot(T)
xx_rgb = ((cam_RGB[:, 0] * FX_RGB) / cam_RGB[:, 2] + CX_RGB + width / 2).astype(int).clip(0, width - 1)
yy_rgb = ((cam_RGB[:, 1] * FY_RGB) / cam_RGB[:, 2] + CY_RGB).astype(int).clip(0, height - 1)
colors = rgb_image[yy_rgb, xx_rgb]/255六. 结论
在本教程中,我们学习了如何从 RGB-D 数据计算点云。在下一个教程中,我们将以一个简单的地面检测为例,仔细分析点云。
谢谢,我希望你喜欢阅读这篇文章。您可以在我的 GitHub 存储库中找到示例。
引用
[1] Zhang, S., & Huang, P. S. (2006).结构光系统校准的新方法。光学工程, 45(8), 083601.
[2] 周旭, (2012).Microsoft Kinect 校准的研究。费尔法克斯乔治梅森大学计算机科学系。
](https://img-blog.csdnimg.cn/e14d2e94bdbf4819bf683585d19efc1f.png)