在STL的使用者层面上,空间配置器一般是隐藏的,使用者不需要知道其具体实现细节即
可进行使用;但是从STL的实现角度来说,由于整个STL的操作对象都存放在容器之内,而容器
需要配置一定的空间来进行存放数据,因此,想要实现或者说深入了解STL的第一步便是掌握
空间配置器的原理。
目录
主要还是说说SGI版本的STL的配置器
我们知道,stl有容器,空间配置器,适配器,迭代器,仿函数以及算法这6个组件:他们之间的运行关系大概是:容器通过配置器去获得数据和存储空间,算法通过迭代器获取容器内容,仿函数可以协助算法完成不同的策略变化,配接器可以修饰或套界仿函数。
allocator是STL的重要组成,但是一般用户不怎么熟悉他,因为allocator隐藏在所有容器(包括vector)身后,默默完成内存配置与释放,对象构造和析构的工作。
首先我们知道c++中内存分配和释放操作是由new和delete去完成的
class A {};
A* p = new A;
//...执行其他操作
delete p;
在我们使用new来建造一个对象的时候,一般是分为两个步骤的:
1.调用::operator new()来构建空间;
2.调用对象的构造函数。
注:::operator new内部由malloc实现、省略指针转换这步。
同理,当我们使用delete函数的时候:
1.调用对象的析构函数
2.调用::operator delete()释放空间。
注:::operator delete内部由free实现
在STL的实现中,为了精细分工、STL allocator决定将上述步骤的两阶段操作分开来,内存
配置操作由alloc::allocate()负责,内存释放由alloc::deallocate负责,对象构建
操作由construct负责,对象析构操作由destroy负责。对于实现我就不过多赘述了
下面主要还是说说SGI版本的STL的配置器
对于SGI STL的实现来说、他这里含有了两个不同的空间配置器
第一个是一个符合部分标准、名为allocatr的配置器std::allocator
仅仅是将::operator new()和
::operator delete()做了一层简单的封装,因此效率比较差。它存在的意义仅在于为用户提供一个兼容老代码的折衷方法,我们不建议使用,而且SGI内部也不使用这种标准的配置器,看一下了解一下
#ifnedf DEFALLOC_H
#define DEFALLOC_H
#include <new.h>
#include <stddef.h>
#include <stdlib.h>
#include <limits.h>
#include <iostream.h>
#include <algobase.h>
template <class T>
inline T* allocate(ptrdiff_t size, T*) {
set_new_handler(0);
T* tmp = (T*)(::operator new((size_t)(size * sizeof(T))));
if (tmp == 0) {
cerr << "out of memory" << endl;
exit(1);
}
return tmp;
}
template <class T>
inline void deallocate(T* buffer) {
::operator delete(buffer);
}
template <class T>
class allocator {
public:
typedef T value_type;
typedef T* pointer;
typedef const T* const_pointer;
typedef T& reference;
typedef const T& const_reference;
typedef size_t size_type;
typedef ptrdiff_t difference_type;
pointer allocate(size_type n) { return ::allocate((difference_type)n, (pointer)0); }
void deallocate(pointer p) { ::deallocator(p); }
pointer address(reference x) { return (pointer)&x; }
const_pointer const_address(const_reference x) { return (const_pointer)&x; }
size_type init_page_size() {
return max(size_type(1), size_type(UINT_MAX/sizeof(T)));
}
};
class allocator<void> {
public:
typedef void* pointer;
};第二个是我们需要重点掌握的特殊配置器 std::alloc
这个配置器是SGI STL的默认配置器,它在<memory>中实现。
<memory>中包含三个文件:
<stl_construct.h>:定义了全局函数construct()和destroy(),负责对象构造和析构。<stl_alloc.h>:内存配置和释放在此处实现,其内部有两级配置器,第一级结构简单,封装malloc()和free(),第二级实现了自由链表和内存池,用于提升大量小额内存配置时的性能。<stl_uninitialiezed.h>:一些用于用于填充和拷贝大块内存的全局函数。
对象构造和/析构,与内存配置/释放是分离实现的。
SGI对于alloc函数的要求如下所示:
1.向system heap要求空间
2.考虑多线程状态
3.考虑内存不足的应变措施
4.考虑过多“小型区块”可能造成的内存碎片问题。
两层配置器的关系如下:
根据情况来判定,如果配置区块大于128bytes,说明“足够大”,调用第一级配置器,而小于等于128bytes,则采用复杂内存池(memory pool)来管理。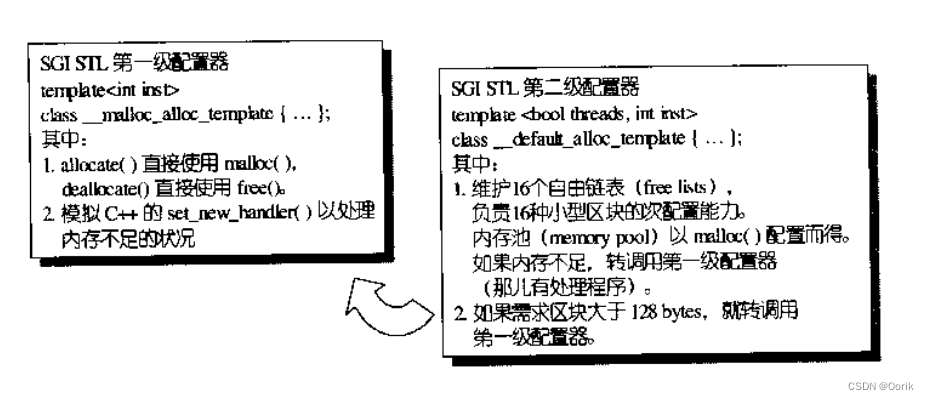
同时为了自由选择,STL又规定了 __USE_MALLOC 宏,如果它存在则直接调用第一级配置器,不然则直接调用第二级配置器。SGI未定义该宏,也就是说默认使用第二级配置器
由于一级配置器存在内存碎片的问题,所以有了二级配置器
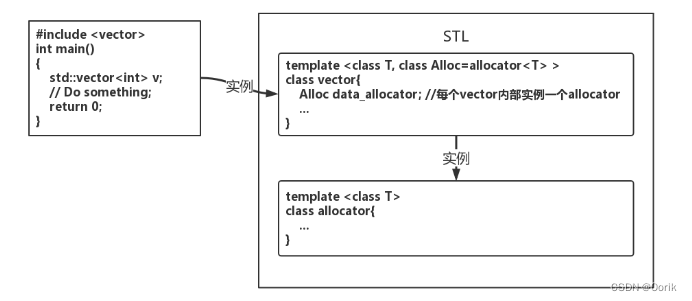
转自《STL源码剖析》 的SGI STL特殊配置器的内部实现图
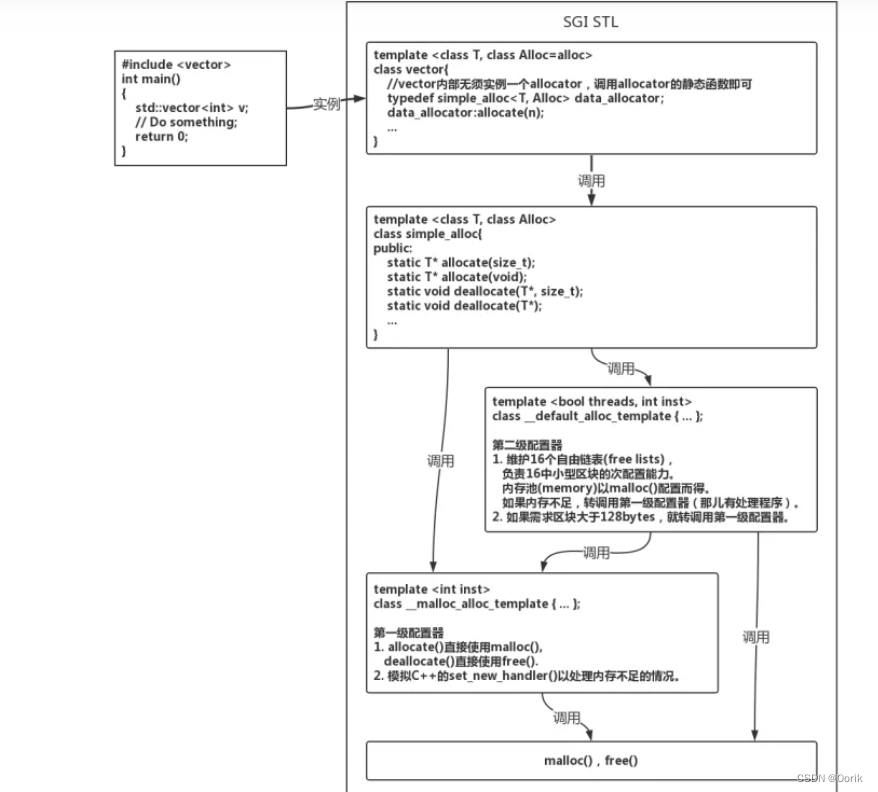
图示左边是用户代码,右边是STL的内部。
我们可以看到,用户代码实例化一个vector对象,vector对象调用alloc的接口,注意,不同于之前标准的allocator,这里不需要实例化一个空间配置器,只需要调用alloc的静态函数就行了。
std::alloc的接口与标准非常相似:
static T* allocate()函数负责空间配置,返回一个T对象大小的空间。static T* allocate(size_t)函数负责批量空间配置。static void deallocate(T*)函数负责空间释放。static void deallocate(T*,size_t)函数负责批量空间释放。
在接口之下,我们看到还有两级配置器,上面的接口根据情况调用这两个配置器,第二级配置器实现了内存池和自由链表,当程序多次进行小空间的配置时,可以从内存池和自由链表中获取空间,减少系统调用,提升性能。当进行大空间的配置时,上面的接口直接调用第一级配置器。最终,它们都是用malloc()和free()来配置和释放空间。
一般C++开发者了解到此已经足够应付大多数开发场景了。
这样看起来std::alloc的结构还算清晰,但是实际实现还会出现多种边界情况,比如,当系统调用malloc()空间不足时,我们需要让第一级配置器来处理,这可能涉及从第二级配置器中回收已经缓存但还未使用的空间,事情就变得繁琐了。
下面来手撕两层配置器的实现:
- 一级空间配置器
一级配置器直接用C中的malloc()以及free()函数来进行处理,当我们的内存分配不足的时候,我们调用oom_malloc()函数和oom_realloc进行处理,这两个函数里面都有循环,不断地去调用“内存不足,要调用例程”,去处理。
#if 1
#include<new>
#define __THROW_BAD_ALLOC throw bad_alloc
#else !defined(__THROW_BAD_ALLOC)
#define __THROW_BAD_ALLOC cerr<<"out of memory"<<endl;
#endif
template<int inst>
class __malloc_alloc_template
{
private:
static void* oom_malloc(size_t);//malloc--指针函数
static void* oom_realloc(void*, size_t);//realloc--指针函数
static void(*__malloc_alloc_oom_handler)();//函数指针
public:
static void* allocate(size_t n)//申请空间
{
void* result = malloc(n);//第一级配置器直接使用malloc
//如果无法满足需求,费用oom_malloc()
if (result == 0) {
result == oom_malloc(n);
}
return result;
}
static void deallocate(void* p, size_t)
{
free(p);//第一级配置器直接使用free()
}
static void* reallocate(void* p, size_t)//不够了追加,是对allocate的补救
{
void* result = realloc(p, new_sz);//第一级配置器直接使用realloc
//无法满足需求,改用oom_realloc()
if (result == 0) {
result = oom_realloc(p, new_sz);
return result;
}
}
//下面这个可以通过他去指定自己的
//out-of-memory handler
static void (*set_malloc_handler(void(*f)()))()
{
void (*old)() = __malloc_alloc_oom_handler;
__malloc_alloc_oom_handler = f;
return old;
}
};
//初始值为0,可以在客户端自己设定
template<int inst>
void(*__malloc_alloc_template<inst>::__malloc_alloc_oom_handler)() = 0;
template<int inst>
void* __malloc_alloc_template<inst>::oom_malloc(size_t n)
{
void (*my_malloc_handler)();
void* result;
for (;;)//死循环,不断尝试释放,配置,释放,配置。。
{
my_malloc_handler = __malloc_alloc_oom_handler;
if (0 == my_malloc_handler)
{
__THROW_BAD_ALLOC;
}
(*my_malloc_handler)();//调用处理例程,企图释放内存
result = malloc(n);//尝试配置内存
if (result)
return result;
}
}
template<int inst>
void* __malloc_alloc_template<inst>::oom_realloc(void* p, size_t n)
{
void (*my_malloc_handler)();
void* result;
for (;;)
{ //不断尝试释放、配置、再释放、再配置。。
my_malloc_handler = __malloc_alloc_oom_handler;
if (0 == my_malloc_handler)
{
__THROW_BAD_ALLOC;
}
(*my_malloc_handler)();//调用处理例程、企图释放释放内存
result = realloc(p, n);//再次尝试配置内存
if (result)
return result;
}
}
typedef __malloc_alloc_template<0> malloc_alloc;
void Out_Of_Memory()//测试
{
cout << "this is out of memory" << endl;
// exit(1);
}
//测试
int main()
{
__malloc_alloc_template<0>::set_malloc_handler(Out_Of_Memory);
int* p = (int*)__malloc_alloc_template<0>::allocate(sizeof(int) * 536870911);
return 0;
}- 二级空间配置器
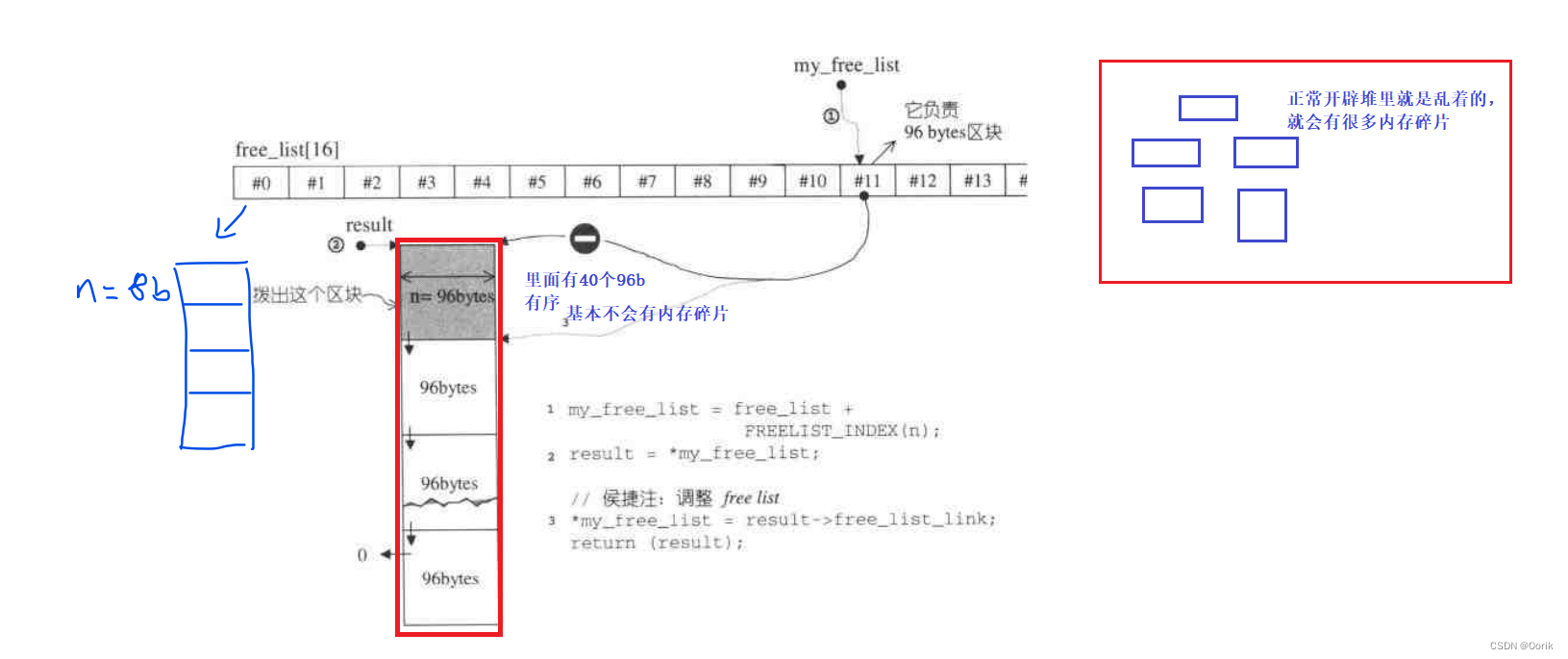
第二级空间配置器多了一些机制,避免太多小额区块造成的内存的碎片,小额区块带来的其实
不仅是内存碎片,配置时的额外负担也是一个大问题(cookie),SGI第二级配置器的做法是,
如果区块够大,超过4096bytes时,就移交第一级配置器,否则就以内存池的方式管理:每次
配置一大块内存,并维护对应的自由链表,下次若再有相同大小的内存需求,就直接从free list
中拔出。如果请求端释放小额内存,就由配置器回收到free list中,为了方便管理,SGI第二级
配置器会主动将任何小额区块的内存需求量上调至8的倍数。
typedef __malloc_alloc_template<0> malloc_alloc;
enum { __ALIGN = 8 };//小区块的上调边界
enum { __MAX_BYTES = 128 };//小型区块的上线
enum { __NFREELISTS = __MAX_BYTES / __ALIGN };//自由链表个数
template<bool threads, int inst>
class __default_alloc_template
{
private:
//把ROUND_UP上调到8的倍数
static size_t ROUND_UP(size_t bytes)
{
return (((bytes)+__ALIGN - 1) & ~(__ALIGN - 1));
}
private:
union obj//共用体
{
union obj* free_list_link;
char client_data[1];
};
private:
//16个自由链表
static obj* free_list[__NFREELISTS];
//下面根据区块的大小,决定使用第n号free_list,n从1开始算
static size_t FREELIST_INDEX(size_t bytes)
{
return ((bytes)+__ALIGN - 1) / __ALIGN - 1;
}
//返回一个大小为n的对象,并可能加入大小为n的其他区块到 free list
static void* refill(size_t n)
{
int nobjs = 20;
char* chunk = chunk_alloc(n, nobjs);
obj** my_free_list;
obj* result;
char* current_obj, * next_obj;
int i;
if (1 == nobjs)
return chunk;
my_free_list = free_list + FREELIST_INDEX(n);
result = (obj*)chunk;
*my_free_list = next_obj = (obj*)(chunk + n);
for (i = 1;; i++)//把free list各个节点串起来
{
current_obj = next_obj;
next_obj = (obj*)((char*)next_obj + n);
if (nobjs - 1 == i)
{
current_obj->free_list_link = 0;
break;
}
else
{
current_obj->free_list_link = next_obj;
}
}
return result;
}
//配置一大块空间,可以容纳nogjs个大小为size的区块
//内存池
static char* chunk_alloc(size_t size, int& nobjs)
{
char* result;
size_t total_bytes = size * nobjs; //8*20
size_t bytes_left = end_free - start_free;
if (bytes_left >= total_bytes)
{//内存池剩余空间完全满足需求量
result = start_free;
start_free += total_bytes;
return result;
}
else if (bytes_left >= size)
{//不完全满足,但够一个以上的区块
nobjs = bytes_left / size;
total_bytes = size * nobjs;
result = start_free;
start_free += total_bytes;
return result;
}
else
{//一个区块也无法提供
//320
size_t bytes_to_get = 2 * total_bytes + ROUND_UP(heap_size >> 4);
if (bytes_left > 0)
{
obj** my_free_list = free_list + REFFLIST_INDEX(bytes_left);
((obj*)start_free)->free_list_link = *my_free_list;
*my_free_list = (obj*)start_free;
}
start_free = (char*)malloc(bytes_to_get);
if (0 == start_free)
{
int i;
obj** my_free_list, * p;
for (i = size; i <= __MAX_BYTES; i += __ALIGN)
{
my_free_list = free_list + FREELIST_INDEX(i);
if (0 != p)
{
*my_free_list = p->free_list_link;
start_free = (char*)p;
end_free = start_free + i;
return chunk_alloc(size, nobjs);
}
}
end_free = 0;
start_free = (char*)malloc_alloc::allocate(bytes_to_get);
}
heap_size += bytes_to_get;
end_free = start_free + bytes_to_get;
return (chunk_alloc(size, nobjs));
}
}
static char* start_free;//内存池起始位置
static char* end_free;//内存池结束位置
static size_t heap_size;
public:
//空间申请的接口
//首先判断区块的大小,如果大于 128bytes –> 调用第一级配置器;
//小于128bytes–> 就检查对应的 free_list(如果没有可用区块,就将区块上调至 8 倍数的边界,
//然后调用 refill(), 为 free list 重新填充空间。
static void* allocate(size_t n)
{
obj** my_free_list;
obj* result;
if (n > (size_t)__MAX_BYTES) //如果>128 调用一级
{
return (malloc_alloc::allocate(n));
}
//寻找16个free list的适合的一个
my_free_list = free_list + FREELIST_INDEX(n);
result = *my_free_list;
if (result == 0)
{//没有找到可用的,准备重新填充free list
void* r = refill(ROUND_UP(n));
return r;
}
*my_free_list = result->free_list_link;
return result;
}
//释放空间
static void deallocate(void* p, size_t n)
{
obj* q = (obj*)p;
obj* volatile* my_free_list;
if (n > (size_t)__MAX_BYTES)
{
malloc_alloc::deallocate(p, n);
return;
}
}
static void* reallocate(void* p, size_t old_sz, size_t new_sz);
};
template<bool threads, int inst>
char* __default_alloc_template<threads, inst>::start_free = 0;
template<bool threads, int inst>
char* __default_alloc_template<threads, inst>::end_free = 0;
template<bool threads, int inst>
size_t __default_alloc_template<threads, inst>::heap_size = 0;
template<bool threads, int inst>
__default_alloc_template<threads, inst>::obj*
__default_alloc_template<threads, inst>::free_list[__NFREELISTS] = { 0,0,0,0,0,0 }推荐阅读:_herongweiV的博客-CSDN博客