实验十一 图
一、实验目的与要求
1)掌握图的存储表示与操作实现。
2)掌握图的连通性及其应用。
二、 实验内容
1.用邻接表存储一个图形结构,并计算每个顶点的度。
2. 采用深度和广度优先搜索算法,遍历上述这张图,并输出遍历结果。
三、实验结果
1)请将调试通过的运行结果截图粘贴在下面,并说明测试用例、运行过程和算法步骤。
2)请分析算法的时间复杂度。
3)请将源代码(必要的注释)cpp文件压缩上传(上传附件)。
题目1:
1)
测试用例:
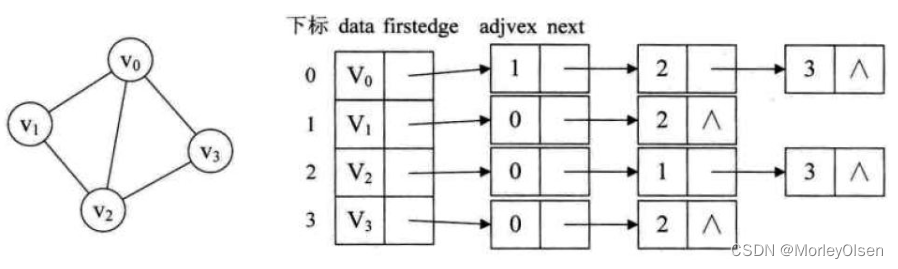
测试用例为总结点数为4、总边数为5的无向图,如下图所示。
运行结果:
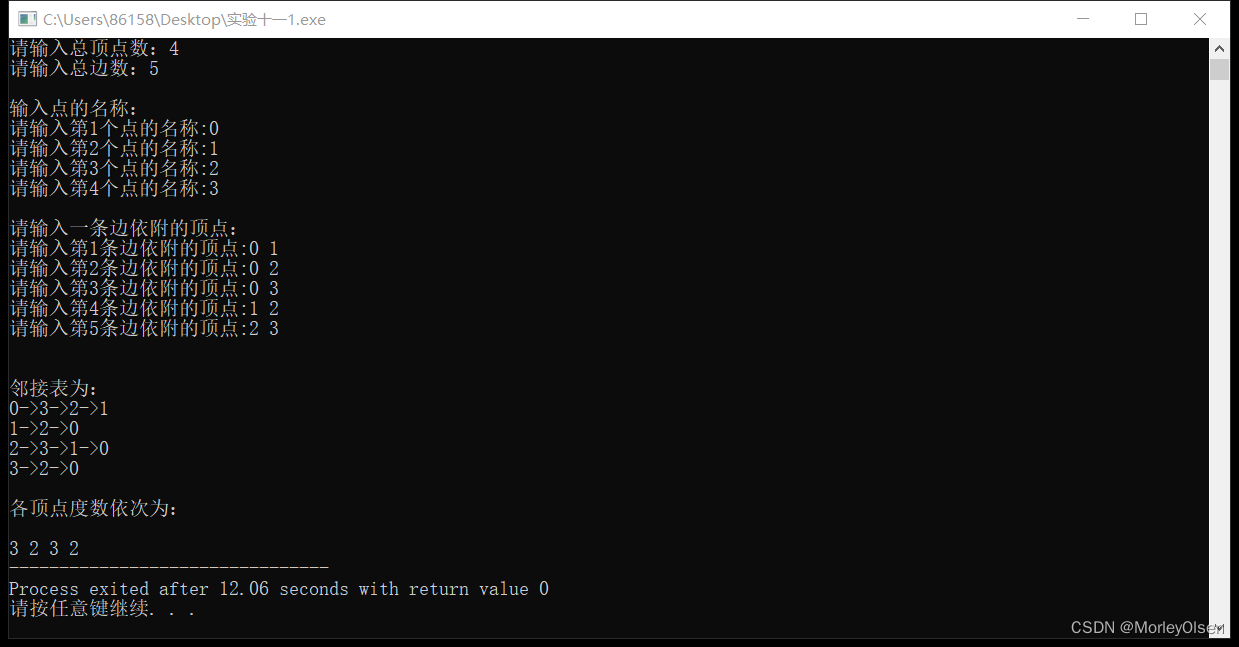
运行过程:
通过邻接表创建无向连通图->通过for循环遍历并输出邻接表结果->通过for循环计算并输出各顶点的度数。
2)
算法步骤和时间复杂度分析:
图的邻接表存储类似于树的孩子链表表示法。对于图中每个顶点vi建立一个链表,第i个链表中的结点表示依附于vi的边。每个链表上附设一个头结点和一个尾结点。
假设需要存储的图的顶点数为V,边数为E。如果存储的是无向图,那么遍历时先访问顶点数组的各个元素,再访问其对应的边链表,由于有V个节点,而且无向图的E条边在边链表中会出现两次,即边共出现2E次,所以一共的访问次数为V+2E。因此,算法的时间复杂度为O(|V|+2|E|)。

对于n个顶点无向图的邻接表,顶点vi的度恰为第i个链表中的结点个数。因此可以计算无向图中每个顶点的度。
3)
实验源代码:
#include <iostream>
using namespace std;
#define MVNum 100//最大顶点数
typedef char VerTexType;//顶点信息
typedef int OtherInfo;//和边相关的信息
//边结点
typedef struct ArcNode{
int adjvex;//该边所指向的顶点的位置
struct ArcNode *nextarc;//指向下一条边的指针
OtherInfo info;//和边相关的信息
}ArcNode;
//顶点
typedef struct VNode{
VerTexType data;//顶点信息
ArcNode *firstarc;//指向第一条依附该顶点的边的指针
}VNode, AdjList[MVNum];//AdjList表示邻接表类型
typedef struct{
AdjList vertices;//邻接表
int vexnum, arcnum;//图的当前顶点数和边数
}ALGraph;
//确定点v在G中的位置
int LocateVex(ALGraph G,VerTexType v){
for(int i = 0; i < G.vexnum; ++i){
if(G.vertices[i].data == v){
return i;//顶点已经存在,返回序号i
}
}
return -1;
}
//采用邻接表表示法,创建无向图G
void CreateUDG(ALGraph &G){
int i , k;
cout <<"请输入总顶点数:";
cin >> G.vexnum;
cout <<"请输入总边数:";
cin >> G.arcnum;
cout << endl;
cout << "输入点的名称:" <<endl;
for(i = 0; i < G.vexnum; ++i){
cout << "请输入第" << (i+1) << "个点的名称:";
cin >> G.vertices[i].data;//输入顶点值
G.vertices[i].firstarc=NULL;//初始化表头结点的指针域为NULL
}
cout << endl;
cout << "请输入一条边依附的顶点:"<<endl;
for(k = 0; k < G.arcnum;++k){
VerTexType v1 , v2;//顶点名字
int i,j;
cout << "请输入第" << (k + 1) << "条边依附的顶点:";
cin >> v1 >> v2;//输入边的两个顶点
i = LocateVex(G, v1);//确定第一个点的位置
j = LocateVex(G, v2);//确定第二个点的位置
ArcNode *p1=new ArcNode;//生成一个新的边结点*p1
p1->adjvex=j;//邻接点序号为j
p1->nextarc= G.vertices[i].firstarc;
G.vertices[i].firstarc=p1;//将新结点*p1插入顶点vi的边表头部
ArcNode *p2=new ArcNode;//生成另一个对称的新的边结点*p2
p2->adjvex=i;//邻接点序号为i
p2->nextarc= G.vertices[j].firstarc;
G.vertices[j].firstarc=p2;//将新结点*p2插入顶点vj的边表头部
}
}
//输出邻接表
void Show(ALGraph &G){
cout<<endl;
int i;
cout<<endl<<"邻接表为:"<<endl;
for(i = 0 ; i < G.vexnum ; ++i){
VNode temp = G.vertices[i];
ArcNode *p = temp.firstarc;
if(p == NULL){
cout << G.vertices[i].data;
cout << endl;
}
else{
cout << temp.data;
while(p){
cout << "->";
cout << p->adjvex;
p = p->nextarc;
}
}
cout << endl;
}
}
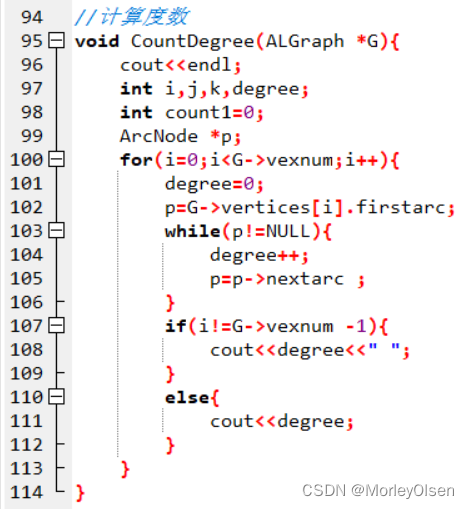
//计算度数
void CountDegree(ALGraph *G){
cout<<endl;
int i,j,k,degree;
int count1=0;
ArcNode *p;
for(i=0;i<G->vexnum;i++){
degree=0;
p=G->vertices[i].firstarc;
while(p!=NULL){
degree++;
p=p->nextarc ;
}
if(i!=G->vexnum -1){
cout<<degree<<" ";
}
else{
cout<<degree;
}
}
}
int main(){
ALGraph G;
CreateUDG(G);
Show(G);
cout<<endl<<"各顶点度数依次为:"<<endl;
CountDegree(&G);
return 0;
}
题目2:
1)
测试用例:
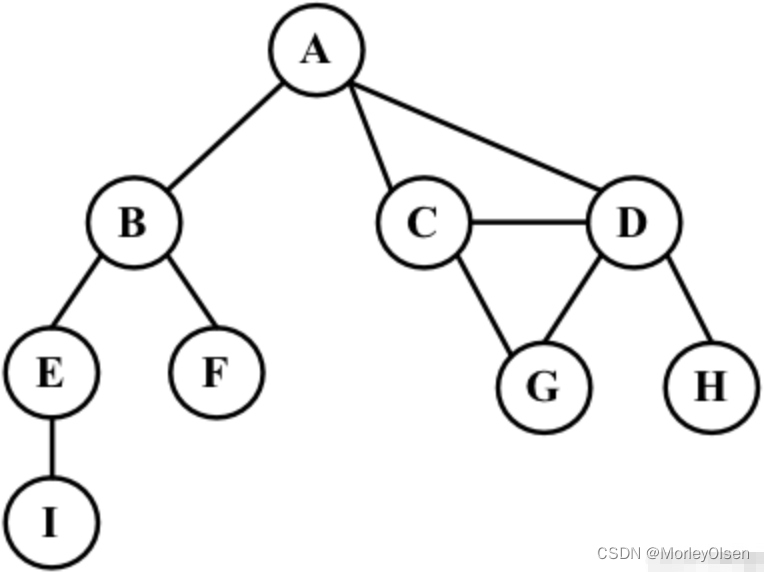
下图所示的总顶点数的9,总边数为10的无向连通图。人为设置从A点开始遍历。
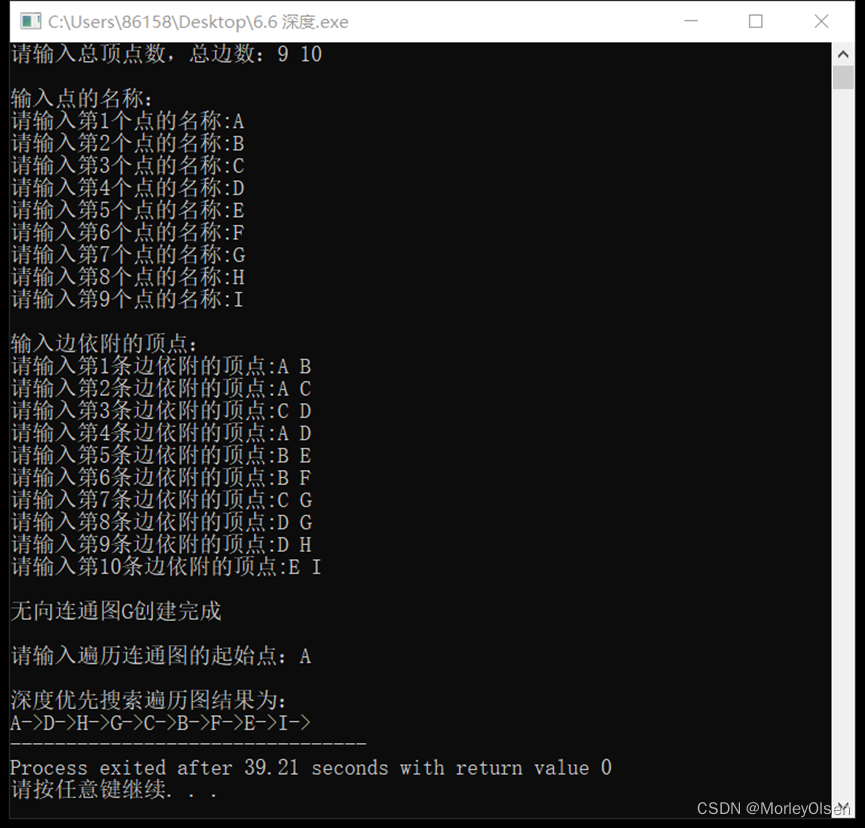
运行结果:
深度优先:
广度优先:
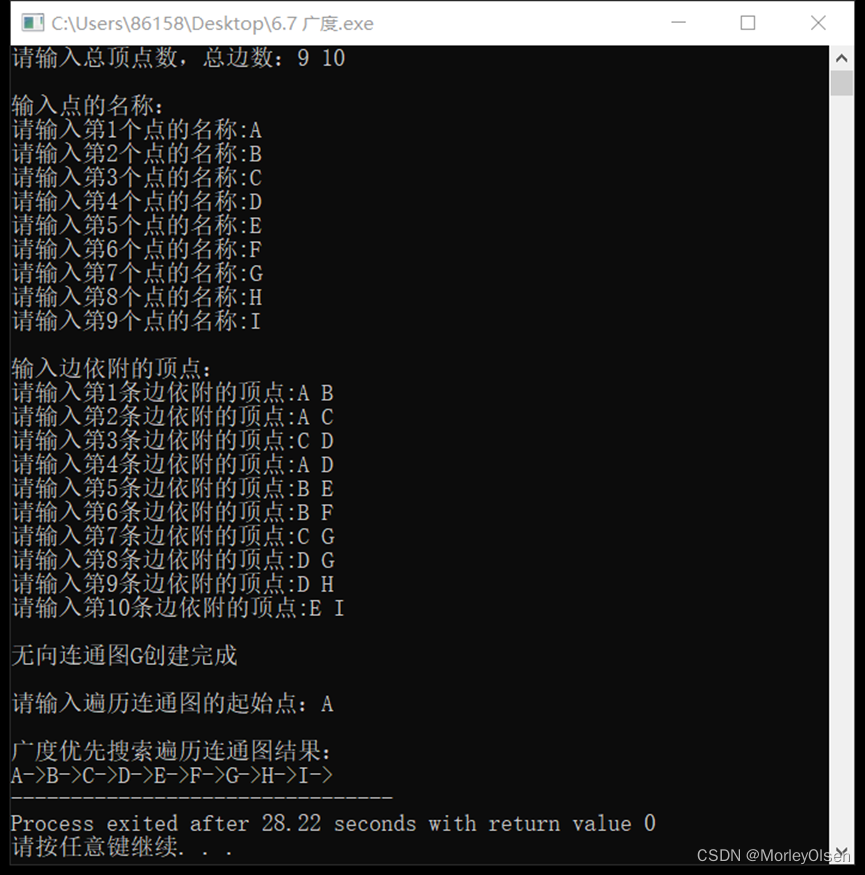
运行过程:
深度优先:
通过邻接表创建无向连通图->输入遍历起点的名称->判断起点是否在无向图内->调用DFS函数进行深度遍历。
广度优先:
通过邻接矩阵和队列创建无向连通图->输入遍历起点的名称->判断起点是否在无向图内->调用BFS函数进行深度遍历。
2)
算法步骤和时间复杂度分析:
深度优先:
假设图的顶点个数为n,边的个数为e。本算法的执行时间主要耗费在递归调用DFS函数上。当访问某顶点时,DFS的执行时间主要耗费在从该顶点出发搜索其所有邻接点上。采用邻接表作为图的存储结构时,对n个顶点访问就需要对所有链表中的e个表结点检查一遍。因此,算法的时间复杂度为O(n+e)。
广度优先:
假设图的顶点个数为n,边的个数为e。本算法对图中的每一个顶点均入队一次。当访问某个顶点时,执行时间主要耗费在从该顶点出发搜索其所有邻接点上。采用邻接矩阵作为图的存储结构时,查找每一个顶点的邻接点所需要的时间为O(n2)。因此,算法的时间复杂度为O(n2)。
3)
实验源代码:
深度优先
//深度优先
#include <iostream>
#include <cstring>
#include <cstdio>
using namespace std;
#define MVNum 100
typedef char VerTexType;
typedef struct ArcNode{ //边结点
int adjvex; //该边所指向的顶点的位置
struct ArcNode *nextarc; //指向下一条边的指针
}ArcNode;
typedef struct VNode{
VerTexType data; //顶点信息
ArcNode *firstarc; //指向第一条依附该顶点的边的指针
}VNode, AdjList[MVNum]; //AdjList表示邻接表类型
typedef struct{
AdjList vertices; //邻接表
int vexnum, arcnum; //图的当前顶点数和边数
}ALGraph;
bool visited[MVNum];//访问标志数组,其初值为"false"
//确定点v在G中的位置
int LocateVex(ALGraph G , VerTexType v){
for(int i = 0; i < G.vexnum; ++i){
if(G.vertices[i].data == v){
return i;
}
}
return -1;
}
//采用邻接表表示法,创建无向图G
void CreateUDG(ALGraph &G){
int i , k;
cout <<"请输入总顶点数,总边数:";
cin >> G.vexnum >> G.arcnum;
cout << endl;
cout << "输入点的名称:" << endl;
//输入各点,构造表头结点表
for(i = 0; i < G.vexnum; ++i){
cout << "请输入第" << (i+1) << "个点的名称:";
cin >> G.vertices[i].data;//输入顶点值
G.vertices[i].firstarc=NULL;
}
cout << endl;
cout << "输入边依附的顶点:" << endl;
//输入各边,构造邻接表
for(k = 0; k < G.arcnum;++k){
VerTexType v1 , v2;
int i , j;
cout << "请输入第" << (k + 1) << "条边依附的顶点:";
cin >> v1 >> v2;
i = LocateVex(G, v1);
j = LocateVex(G, v2);
//确定v1和v2在G中位置,即顶点在G.vertices中的序号
ArcNode *p1=new ArcNode;//生成一个新的边结点*p1
p1->adjvex=j;//邻接点序号为j
p1->nextarc= G.vertices[i].firstarc;
G.vertices[i].firstarc=p1;
//将新结点*p1插入顶点vi的边表头部
ArcNode *p2=new ArcNode;//生成另一个对称的新的边结点*p2
p2->adjvex=i;//邻接点序号为i
p2->nextarc= G.vertices[j].firstarc;
G.vertices[j].firstarc=p2;
//将新结点*p2插入顶点vj的边表头部
}
}
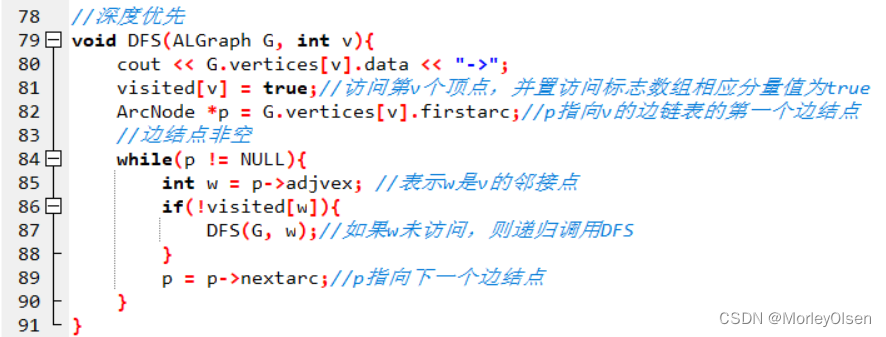
//深度优先
void DFS(ALGraph G, int v){
cout << G.vertices[v].data << "->";
visited[v] = true;//访问第v个顶点,并置访问标志数组相应分量值为true
ArcNode *p = G.vertices[v].firstarc;//p指向v的边链表的第一个边结点
//边结点非空
while(p != NULL){
int w = p->adjvex; //表示w是v的邻接点
if(!visited[w]){
DFS(G, w);//如果w未访问,则递归调用DFS
}
p = p->nextarc;//p指向下一个边结点
}
}
int main(){
ALGraph G;
CreateUDG(G);
cout << endl;
cout << "无向连通图G创建完成" << endl << endl;
cout << "请输入遍历连通图的起始点:";
VerTexType c;
cin >> c;
int i;
for(i = 0 ; i < G.vexnum ; ++i){
if(c == G.vertices[i].data){
break;
}
}
cout << endl;
while(i >= G.vexnum){
cout << "该点不存在,请重新输入!" << endl;
cout << "请输入遍历连通图的起始点:";
cin >> c;
for(i = 0 ; i < G.vexnum ; ++i){
if(c == G.vertices[i].data){
break;
}
}
}
cout << "深度优先搜索遍历图结果为:" << endl;
DFS(G , i);
return 0;
}
广度优先
//广度优先
#include <iostream>
using namespace std;
#define MVNum 100
#define MAXQSIZE 100
typedef char VerTexType;
typedef int ArcType;
bool visited[MVNum];//访问标志数组,其初值为"false"
//图的邻接矩阵存储表示-
typedef struct{
VerTexType vexs[MVNum];//顶点表
ArcType arcs[MVNum][MVNum];//邻接矩阵
int vexnum,arcnum;//图的当前点数和边数
}Graph;
//队列
typedef struct{
ArcType *base;//初始化的动态分配存储空间
int front;//头指针
int rear;//尾指针,队尾元素的下一个位置
}sqQueue;
//构造一个空队列Q
void InitQueue(sqQueue &Q){
Q.base = new ArcType[MAXQSIZE];
if(!Q.base){
exit(1);
}
Q.front = Q.rear = 0;
}
//插入元素e为Q的新的队尾元素
void EnQueue(sqQueue &Q, ArcType e){
if((Q.rear + 1) % MAXQSIZE == Q.front){
return;
}
Q.base[Q.rear] = e;
Q.rear = (Q.rear + 1) % MAXQSIZE;
}
//判断是否为空队
bool QueueEmpty(sqQueue Q){
if(Q.rear == Q.front){
return true;
}
return false;
}
//队头元素出队
void DeQueue(sqQueue &Q, ArcType &u){
u = Q.base[Q.front];
Q.front = (Q.front + 1) % MAXQSIZE;
}
//确定点v在G中的位置
int LocateVex(Graph G , VerTexType v){
for(int i = 0; i < G.vexnum; ++i){
if(G.vexs[i] == v){
return i;
}
}
return -1;
}
//采用邻接矩阵表示法,创建无向G
void CreateUDN(Graph &G){
int i , j , k;
cout <<"请输入总顶点数,总边数:";
cin >> G.vexnum >> G.arcnum;
cout << endl;
cout << "输入点的名称:" << endl;
for(i = 0; i < G.vexnum; ++i){
cout << "请输入第" << (i+1) << "个点的名称:";
cin >> G.vexs[i];
}
cout << endl;
//初始化邻接矩阵,边的权值均置为极大值MaxInt
for(i = 0; i < G.vexnum; ++i)
for(j = 0; j < G.vexnum; ++j)
G.arcs[i][j] = 0;
cout << "输入边依附的顶点:" << endl;
for(k = 0; k < G.arcnum;++k){
VerTexType v1 , v2;
cout << "请输入第" << (k + 1) << "条边依附的顶点:";
cin >> v1 >> v2;
i = LocateVex(G, v1);
j = LocateVex(G, v2);
//确定v1和v2在G中的位置,即顶点数组的下标
G.arcs[i][j] = 1;//边<v1, v2>的权值置为w
G.arcs[j][i] = G.arcs[i][j];//置<v1, v2>的对称边<v2, v1>的权值为w
}
}
//返回v的第一个邻接点
int FirstAdjVex(Graph G , int v){
int i;
for(i = 0 ; i < G.vexnum ; ++i){
if(G.arcs[v][i] == 1 && visited[i] == false){
return i;
}
}
return -1;
}
//返回v相对于w的下一个邻接点
int NextAdjVex(Graph G , int u , int w){
int i;
for(i = w ; i < G.vexnum ; ++i){
if(G.arcs[u][i] == 1 && visited[i] == false){
return i;
}
}
return -1;
}
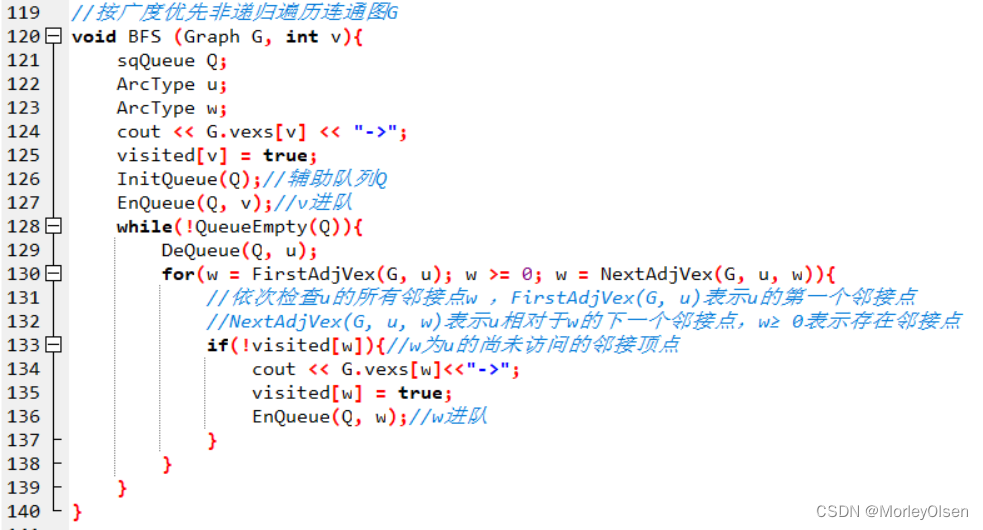
//按广度优先非递归遍历连通图G
void BFS (Graph G, int v){
sqQueue Q;
ArcType u;
ArcType w;
cout << G.vexs[v] << "->";
visited[v] = true;
InitQueue(Q);//辅助队列Q
EnQueue(Q, v);//v进队
while(!QueueEmpty(Q)){
DeQueue(Q, u);
for(w = FirstAdjVex(G, u); w >= 0; w = NextAdjVex(G, u, w)){
//依次检查u的所有邻接点w ,FirstAdjVex(G, u)表示u的第一个邻接点
//NextAdjVex(G, u, w)表示u相对于w的下一个邻接点,w≥0表示存在邻接点
if(!visited[w]){//w为u的尚未访问的邻接顶点
cout << G.vexs[w]<<"->";
visited[w] = true;
EnQueue(Q, w);//w进队
}
}
}
}
int main(){
Graph G;
CreateUDN(G);
cout << endl;
cout << "无向连通图G创建完成" << endl << endl;
cout << "请输入遍历连通图的起始点:";
VerTexType c;
cin >> c;
int i;
for(i = 0 ; i < G.vexnum ; ++i){
if(c == G.vexs[i]){
break;
}
}
cout << endl;
while(i >= G.vexnum){
cout << "该点不存在,请重新输入!" << endl;
cout << "请输入遍历连通图的起始点:";
cin >> c;
for(i = 0 ; i < G.vexnum ; ++i){
if(c == G.vexs[i]){
break;
}
}
}
cout << "广度优先搜索遍历连通图结果:" << endl;
BFS(G , i);
return 0;
}
实验十一 图(2)
一、实验目的与要求
3)掌握最小生成树的概念和算法;
4)掌握最短路径的算法的实现;
5)掌握拓扑排序的应用。
二、实验内容
1.输出所有可能的路径
有n个结点的有向无环图,选取合适的存储方式并找到所有从0到n-1的路径并输出(不要求按顺序)。二维数组的第i个数组中的单元都表示有向图中i号结点所能到达的结点(注:有向图是有方向的,即规定了a→b你就不能从b→a)空就是没有下一个结点了。
示例1:
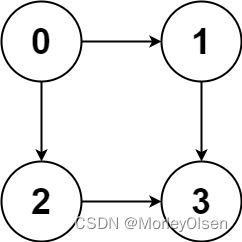
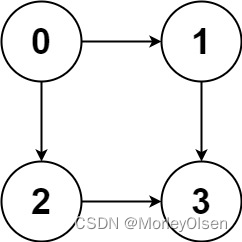
输入:graph = [[1,2],[3],[3],[]]
输出:[[0,1,3],[0,2,3]]
解释:有两条路径 0 -> 1 -> 3 和 0 -> 2 -> 3
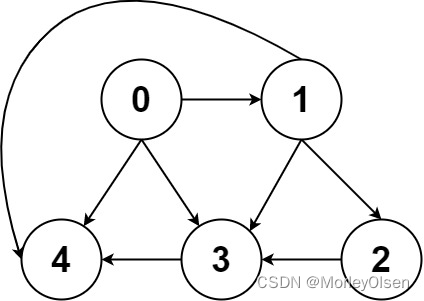
示例2:
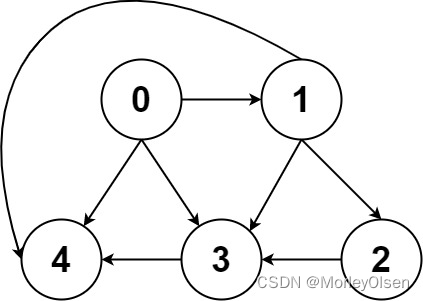
输入:graph = [[4,3,1],[3,2,4],[3],[4],[]]
输出:[[0,4],[0,3,4],[0,1,3,4],[0,1,2,3,4],[0,1,4]]
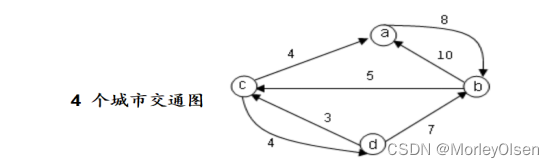
2.建造物流配送中心问题
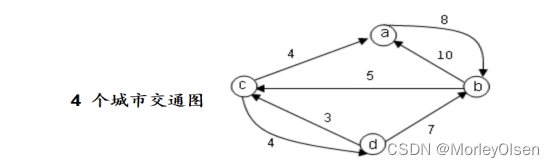
给定4个城市之间的交通图如下图所示(图中弧上数字表示城市之间的道路长度)。要在4个城市之间选择一个城市建造一个物流配送中心,并使得到物流配送中心最远的城市到物流配送中心的路程最短。
要求:
(1)设计存储结构表示城市及城市之间的关系;
(2)求出物流配送中心最远城市到物流配送中心的最短路程;
(3)分析算法的时间复杂度。
三、实验结果
1)请将调试通过的主要源代码、运行结果截图粘贴在下面,并说明测试用例、运行过程。(必要的注释、Times New Roman 5号,行间距1.5倍)
2)简述算法步骤(选画技术路线图),格式如下:
S1:
S2:
3)请分析算法的时间复杂度。
4)请将源代码(必要的注释)cpp文件一起压缩上传(上传附件)。
题目1:
(1.1)源代码
#include <iostream>
#include <cstdio>
#include <vector>
using namespace std;
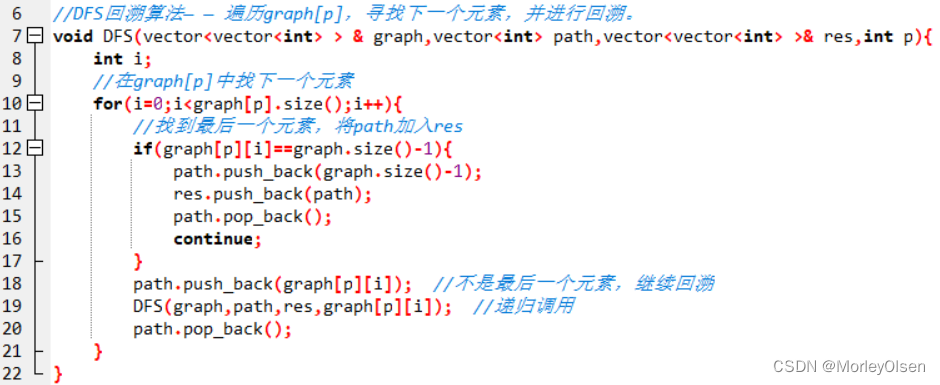
//DFS回溯算法——遍历graph[p],寻找下一个元素,并进行回溯。
void DFS(vector<vector<int> > & graph,vector<int> path,vector<vector<int> >& res,int p){
int i;
//在graph[p]中找下一个元素
for(i=0;i<graph[p].size();i++){
//找到最后一个元素,将path加入res
if(graph[p][i]==graph.size()-1){
path.push_back(graph.size()-1);
res.push_back(path);
path.pop_back();
continue;
}
path.push_back(graph[p][i]); //不是最后一个元素,继续回溯
DFS(graph,path,res,graph[p][i]); //递归调用
path.pop_back();
}
}
//寻找所有到达路径
vector<vector<int> > allPathsSourceTarget(vector<vector<int> >& graph) {
vector<vector<int> > res; //res存储一条路径的所有结点
vector<int> path={0};
DFS(graph,path,res,0); //调用DFS函数
return res;
}
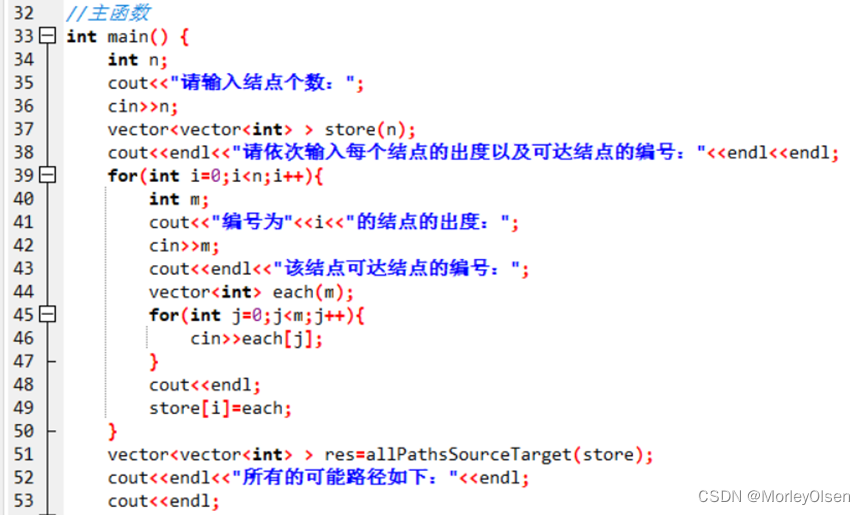
//主函数
int main() {
int n;
cout<<"请输入结点个数:";
cin>>n;
vector<vector<int> > store(n);
cout<<endl<<"请依次输入每个结点的出度以及可达结点的编号:"<<endl<<endl;
for(int i=0;i<n;i++){
int m;
cout<<"编号为"<<i<<"的结点的出度:";
cin>>m;
cout<<endl<<"该结点可达结点的编号:";
vector<int> each(m);
for(int j=0;j<m;j++){
cin>>each[j];
}
cout<<endl;
store[i]=each;
}
vector<vector<int> > res=allPathsSourceTarget(store);
cout<<endl<<"所有的可能路径如下:"<<endl;
cout<<endl;
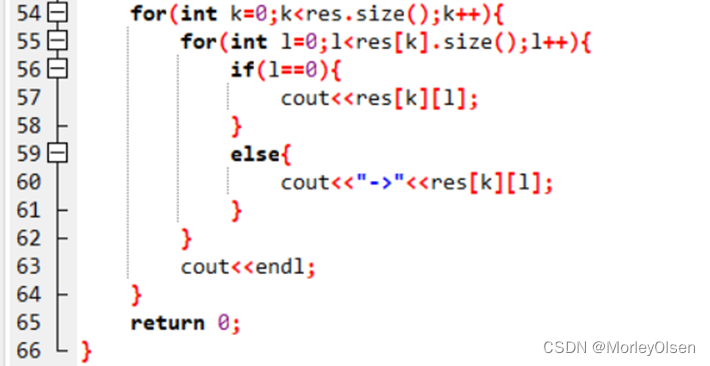
for(int k=0;k<res.size();k++){
for(int l=0;l<res[k].size();l++){
if(l==0){
cout<<res[k][l];
}
else{
cout<<"->"<<res[k][l];
}
}
cout<<endl;
}
return 0;
}
(1.2)测试用例
测试用例1:
如图1所示的4点4边的有向图。寻找0点到3点的所有可能路径。
测试用例2:
如图2所示的5点8边的有向图。寻找0点到4点的所有可能路径。
 (图1)
(图1)
 (图2)
(图2)
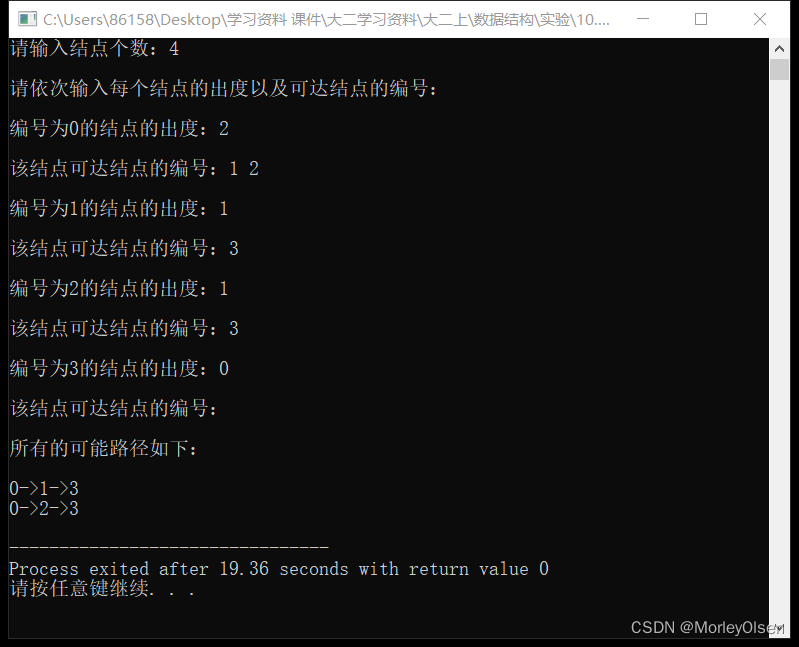
(1.3)运行结果
测试用例1:
测试用例2:
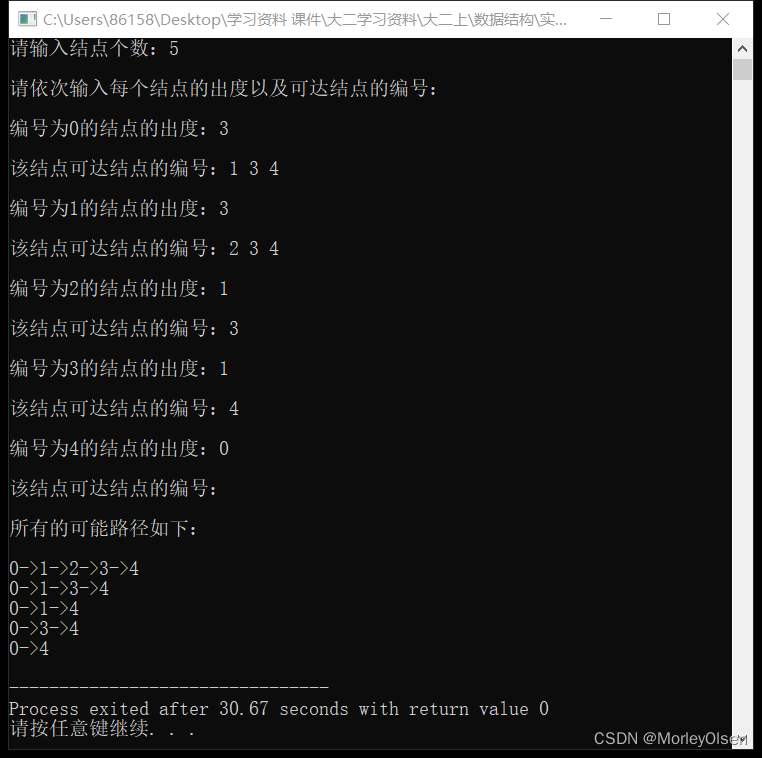
(1.4)运行过程
输入总结点数 -> 输入各结点的出度 -> 输入当前结点可达的结点 -> 调用寻找所有到达路径的函数 -> DFS回溯遍历 -> 输出所有可能的路径。
(2)算法步骤
S1:DFS回溯函数。该函数不仅包含了递归的过程,而且包含了回退的过程。对于一个无向连通图,访问图中某个顶点v0后,然后访问它的某一个邻接顶点v1,然后再从v1出发,访问v1的未访问过的邻接顶点。如此下去,直至到达所有的领接顶点都被访问过。然后回退一步,回到前一次被访问的顶点,看是否还有没有访问的顶点。如果有没有访问的顶点,那么从这个顶点出发,进行向上述的过程一样进行访问;如果无没有访问的顶点,那么再回退一步,进行类似的访问,直至所有的顶点都被访问为止。后续该函数将在寻找所有到达路径函数中被调用。
S2:寻找所有到达路径函数。利用vector<int>向量容器,同时调用DFS回溯函数,将得到的路径结点顺序存储到res数组中,最后返回res数组的结果。后续该函数将在主函数中被调用。

S3:主函数。依次输入结点数、每个结点的出度和当前结点指向的结点,并用数组储存起来。建立起有向图的结构,并明确各个结点之间的连通性。
(3)算法时间复杂度分析
在遍历有向图时,对于图中每个结点,DFS函数至多调用一次。一旦某个结点被标志为已访问,就不再从当前结点开始进行搜索。对图的遍历实质上是对每个结点查找其邻接点的过程。DFS回溯函数中,使用的是二维数组和向量容器进行存储。因此,查找每个顶点的邻接点所需时间为O(n2)。
因此,本算法的时间复杂度为O(n2)。
题目2:
(1.1)源代码
#include <iostream>
#include <vector>
#define inf 99999
using namespace std;
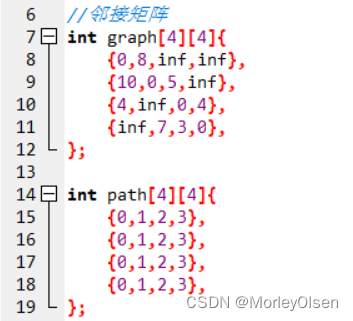
//邻接矩阵
int graph[4][4]{
{0,8,inf,inf},
{10,0,5,inf},
{4,inf,0,4},
{inf,7,3,0},
};
int path[4][4]{
{0,1,2,3},
{0,1,2,3},
{0,1,2,3},
{0,1,2,3},
};
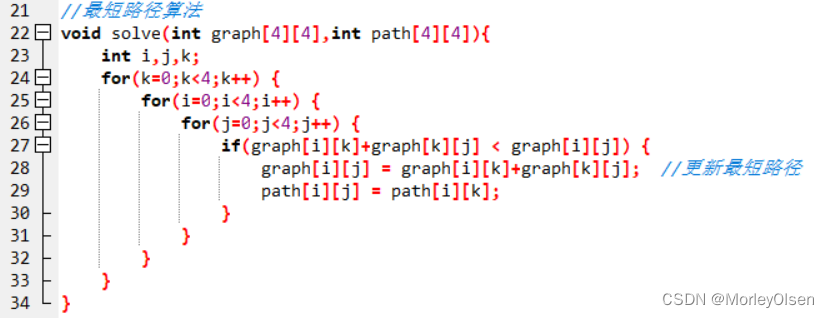
//最短路径算法
void solve(int graph[4][4],int path[4][4]){
int i,j,k;
for(k=0;k<4;k++) {
for(i=0;i<4;i++) {
for(j=0;j<4;j++) {
if(graph[i][k]+graph[k][j] < graph[i][j]) {
graph[i][j] = graph[i][k]+graph[k][j]; //更新最短路径
path[i][j] = path[i][k];
}
}
}
}
}
//输出邻接矩阵
void Output(int graph[4][4]){
int i,j;
for(i=0;i<4;i++){
cout<<"[";
for(j=0;j<4;j++){
if(graph[i][j]==99999){
cout<<"inf";
}
else{
cout.width(4);
cout<<graph[i][j];
}
if(j!=3){
cout<<",";
}
}
cout<<"]\n";
}
}
//排序最远距离
void Sort(int graph[4][4]){
int i,j,maxlen[4];//i行j列
for(j=0;j<4;j++){
int maxno=0;
for(i=0;i<4;i++){
if(graph[maxno][j]<graph[i][j]){
maxno=i;
}
}
maxlen[j]=maxno;
}
cout<<"到当前结点最远的距离依次为:";
for(int k=0;k<4;k++){
cout<<graph[maxlen[k]][k]<<" ";//第k列的最大数
}
cout<<endl;
cout<<"其中最小的距离为:";
int min=graph[maxlen[0]][0],minno=0;
for(i=1;i<4;i++){
if(min>graph[maxlen[i]][i]){
min=graph[maxlen[i]][i];
minno=i;
}
}
cout<<min<<endl;
cout<<"所以物流配送中心应该建设的地方为:";
switch(minno){
case 0:cout<<"a"<<endl;break;
case 1:cout<<"b"<<endl;break;
case 2:cout<<"c"<<endl;break;
case 3:cout<<"d"<<endl;break;
}
}
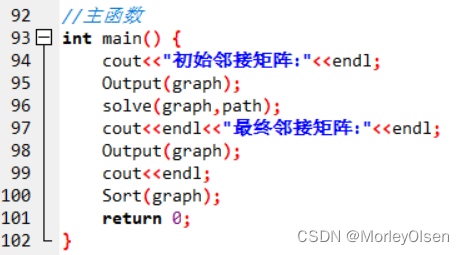
//主函数
int main() {
cout<<"初始邻接矩阵:"<<endl;
Output(graph);
solve(graph,path);
cout<<endl<<"最终邻接矩阵:"<<endl;
Output(graph);
cout<<endl;
Sort(graph);
return 0;
}
(1.2)测试用例
测试用例为如下图所示的4点7边的有向图。
预设置的邻接矩阵为:
{0,8,inf,inf}
{10,0,5,inf}
{4,inf,0,4}
{inf,7,3,0}
(1.3)运行结果

(1.4)运行过程
预先设置初始邻接矩阵 -> 输出初始邻接矩阵 -> 将每一个结点进行最小路径函数调用 -> 输出最小路径条件下的邻接矩阵 -> 排序离当前结点的最远距离 -> 寻找最远距离中的最小值和最小值对应的结点并输出。
(2)算法步骤
S0:初始化。预先设置邻接矩阵graph和存储路径的二维数组path。
S1:最短路径算法函数。利用三层for循环,遍历图的所有路径,同时根据判断条件得到当前的最短路径,并更新最短路径,从而使graph中的数据得以更新。
S2:输出邻接矩阵函数。按照矩阵的形式,输出结果最短路径算法更新后的邻接矩阵。

S3:排序最远距离函数。首先通过两层for循环寻找所有结点到当前结点的最远距离,并通过maxlen数组存储。之后通过一层for循环寻找maxlen数组中的最小值,并记录最小值对应的结点序号。最后统一输出每一个结点的最远物流距离,最小的最远物流距离及其对应结点。


S4:主函数。在主函数中依次调用输出邻接矩阵函数(最初的状态)、最短路径算法函数、输出邻接矩阵函数(给每个结点均进行了戴克斯特拉算法的状态)、排序最远距离函数,即可得到物流中心的建设结果和计算分析过程。
(3)算法时间复杂度分析
在最短路径算法函数中,使用了三层for循环来更新最短路径,对于邻接矩阵的每一行而言,耗费的时间为O(n3)。
在排序最远距离函数中,使用了两层for循环来寻找每个结点的最远物流距离,耗费的时间为O(n2);并使用了一层for循环来寻找最远物流距离中的最小值,耗费的时间为O(n)。
因此,本算法的时间复杂度为O(n3)。