前面内容:
一. 器件选型心得(系统设计)--1_goldqiu的博客-CSDN博客
一. 器件选型心得(系统设计)--2_goldqiu的博客-CSDN博客
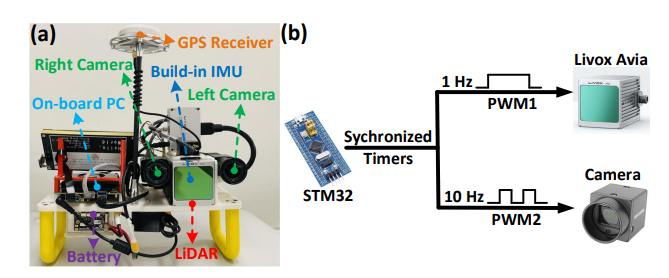
二. 多传感器时间同步方案(时序闭环)--1
三. 多传感器标定方案(空间同步)--1_goldqiu的博客-CSDN博客
三. 多传感器标定方案(空间同步)--2
三. 多传感器标定方案(空间同步)--3
外参5:LiDAR和IMU(GNSS)
根据IMU+GNSS生成的位姿序列:
和LiDAR生成的位姿序列:
![]()
来计算外参矩阵

对于每一个时刻,都存在如下的对应关系:
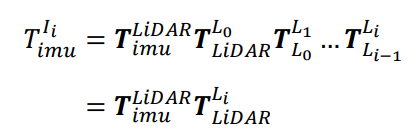
上式,通过将R表达成李代数形式,构建非线性优化问题:

)
利用高斯牛顿或LM算法,可以求解。本质上也是求解T使两个位姿序列的误差最小。
这里也同样可以构建一个半自动标定的上位机,在特定的标志物场景下,进行来回两趟的点云IMU融合建图数据提取,然后通过上位机标定三个角度。
参考:
goldqiu:十五.激光惯导LIO-SLAM框架学习之惯导与雷达外参标定(1)和
外参6:LiDAR和Radar
• Radar检测的目标无高度信息,仅含极坐标信息,因此标定主要关注(x, y, yaw);
• 标定策略:将金属三角锥(检测目标)放置于自车正前方。(毫米波雷达对金属感应比较强烈)
对于:

标定的参数为:

外参7:超声波雷达
超声波感知距离以及角度分辨率都不高,因此安装时测量安装位置即可,无需标定。
补充:IMU内参标定
一般来说,IMU的内参出厂一般已经标定好了,可以拿到bias和噪声。但是如果需要标定,可以参考:
goldqiu:十四.激光和惯导LIO-SLAM框架学习之惯导内参标定
但是现有的例如LIO-SAM等紧耦合LIO-SLAM系统,一般会将IMU零偏和噪声与待估计位姿加进去一起估计。
外参的在线动态修正
什么是在线标定?
在车辆运行期间,动态修正传感器之间的相对位姿参数。与离线标定不同,在线标定不能摆场景(如标定板),因此难度更大。
为什么离线标好了,还需要在线标定?
在车辆运行期间,传感器的安装位置因为振动或者外力碰撞会发生变化。
如何实现在线标定?
核心考虑前视区域,从传感器数据的丰富程度上,在线标定包括LiDAR和Camera。
实现的功能:
• 在线修正标定参数;
• 在线预警:当参数异常时发出报警。
传感器外参动态修正:思路1——手眼标定
参考机械臂中的手眼标定,机械臂为hand,机械臂中有camera,为cam,底座为base:
机械臂底座和标定板的位置不变,即已知
![]()
通过机械臂的运动,求出hand到eye的位置关系 :
![]()
通过多个位置映射关系,构建优化问题,求解得到:

其原理是:两个传感器,通过观测同一组运动,可求出传感器之间的位姿关系。机械臂的手眼标定中,则包括了相机和机械臂两组的运动,便可求出之间的关系。
那么如:LiDAR通过ICP等算法、Camera通过特征点或语义特征,结合IMU(GNSS)的里程计,构建动态手眼标定问题,动态修正外参。
传感器外参动态修正:思路2—— DeepLearning方法
输入为:a. RGB图片 b. LiDAR PointCloud
输出为:c. 未标定前投影 d. 标定后投影
深度学习的lost-function为c与d之间的投影误差,通过深度学习的方式,使这个误差达到最小,得到这个参数。
• 优点:可以获取全面的特征信息,用于估计外参。
• 缺点:由于R的约束问题,外参估计不是特别稳定,特别是姿态角。
calibration_kit包范例的使用
待补充
参考:深蓝学院《多传感器融合感知》


![[VRTK4.0]添加一个Curved Pointer](https://img-blog.csdnimg.cn/3f68296d6f594f26bccdf0cefbb76956.png)