目录
STM32的CAN外设简介
CAN框图剖析
CAN控制内核
工作模式
位时序及波特率
CAN发送邮箱
CAN接收FIFO
验收筛选器(重点)
整体控制逻辑
STM32的CAN外设简介
STM32的芯片中具有bxCAN控制器 (Basic Extended CAN 基本扩展CAN外设),它支持CAN协议2.0A(不支持扩展帧)和2.0B标准(支持扩展帧)。所以我们的STM32芯片是可以发送控制帧的。
该CAN控制器支持最高的通讯速率为1Mb/s;可以自动地接收和发送CAN报文,支持使用标准ID和扩展ID的报文;外设中具有3个发送邮箱,发送报文的优先级可以使用软件控制,还可以记录发送的时间;具有2个3级深度的接收FIFO(每个可以存储一个报文,一共可存储6个报文),可使用过滤功能只接收或不接收某些ID号的报文;可配置成自动重发;不支持使用DMA进行数据收发。
至此,所介绍的CAN协议只是CAN的基本协议,在CAN协议之上有一种叫做CAN OPEN的协议。它是在CAN基本协议的基础上,对很多报文进行一些规定,比如说怎么传送,怎么在几个节点之间进行通信都有一些更详细的规定。在我们实际工作中大部分都是用CAN OPEN协议。简单来说就是CAN OPEN在CAN的基础上又打包了很多情况,根据很多情况进行处理。
就相当于TCP/IP协议,它本身只规定了每个节点之间用MAC地址进行数据传输,然后再它之上又加了IP协议和TCP协议这些东西。
CAN框图剖析
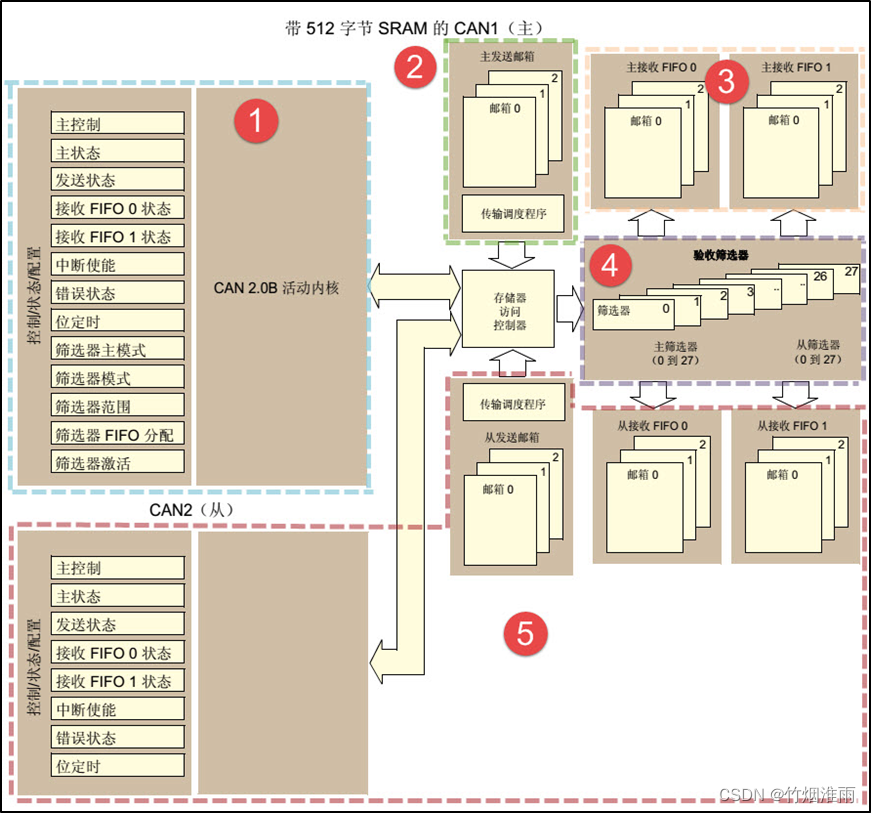
- CAN控制内核
- CAN发送邮箱:我们要发送报文的时候,先把报文放在邮箱里面,当总线空闲了之后就会去发送了。多个节点会有总线竞争的情况,多个节点同时发送报文的时候,就会将报文进行缓存,然后根据ID号优先级来发送。
- CAN接收FIFO:作用和发送邮箱一样,用于暂存数据报文。
- 验收筛选器:通过验收筛选器可以对总线上的数据报文进行筛选,筛选某一类的报文存储在接收FIFO里。
- 整体控制逻辑
STM32的有两组CAN控制器,其中CAN1是主设备,框图中的“存储访问控制器”是由CAN1控制的,CAN2无法直接访问存储区域,所以使用CAN2的时候必须使能CAN1外设的时钟。在STM32F103中只有一个CAN设备,在STM32F105或STM32F4以上版本才有两个CAN外设。
CAN控制内核
框图中标号1处的CAN控制内核包含了各种控制寄存器及状态寄存器,我们主要讲解其中的主控制寄存器CAN_MCR及位时序寄存器CAN_BTR。
主控制寄存器CAN_MCR负责管理CAN的工作模式,它使用以下寄存器位实现控制。

- DBF调试冻结功能
DBF(Debug freeze)调试冻结,使用它可设置CAN处于工作状态或禁止收发的状态,禁止收发时仍可访问接收FIFO中的数据。这两种状态是当STM32芯片处于程序调试模式时才使用的,平时使用并不影响。
- TTCM时间触发模式
TTCM(Time triggered communication mode)时间触发模式,它用于配置CAN的时间触发通信模式,在此模式下,CAN使用它内部定时器产生时间戳,并把它保存在CAN_RDTxR、CAN_TDTxR寄存器中。内部定时器在每个CAN位时间累加,在接收和发送的帧起始位被采样,并生成时间戳。利用它可以实现ISO 11898-4 CAN标准的分时同步通信功能。

- ABOM自动离线管理
ABOM(Automatic bus-off management) 自动离线管理,它用于设置是否使用自动离线管理功能。当节点检测到它发送错误或接收错误超过一定值时,会自动进入离线状态,在离线状态中,CAN不能接收或发送报文。处于离线状态的时候,可以软件控制恢复或者直接使用这个自动离线管理功能,它会在适当的时候自动恢复。
- AWUM自动唤醒
AWUM(Automatic bus-off management),自动唤醒功能,CAN外设可以使用软件进入低功耗的睡眠模式,如果使能了这个自动唤醒功能,当CAN检测到总线活动的时候,会自动唤醒。
- NART自动重传
NART(No automatic retransmission)报文自动重传功能,设置这个功能后,当报文发送失败时会自动重传至成功为止。若不使用这个功能,无论发送结果如何,消息只发送一次。
- RFLM锁定模式
RFLM(Receive FIFO locked mode)FIFO锁定模式,该功能用于锁定接收FIFO。锁定后,当接收FIFO溢出时,会丢弃下一个接收的报文。若不锁定,则下一个接收到的报文从第一个FIFO开始覆盖原报文。
- TXFP报文发送优先级的判定方法
TXFP(Transmit FIFO priority)报文发送优先级的判定方法,当CAN外设的发送邮箱中有多个待发送报文时,本功能可以控制它是根据报文的ID优先级还是报文存进邮箱的顺序来发送。
工作模式
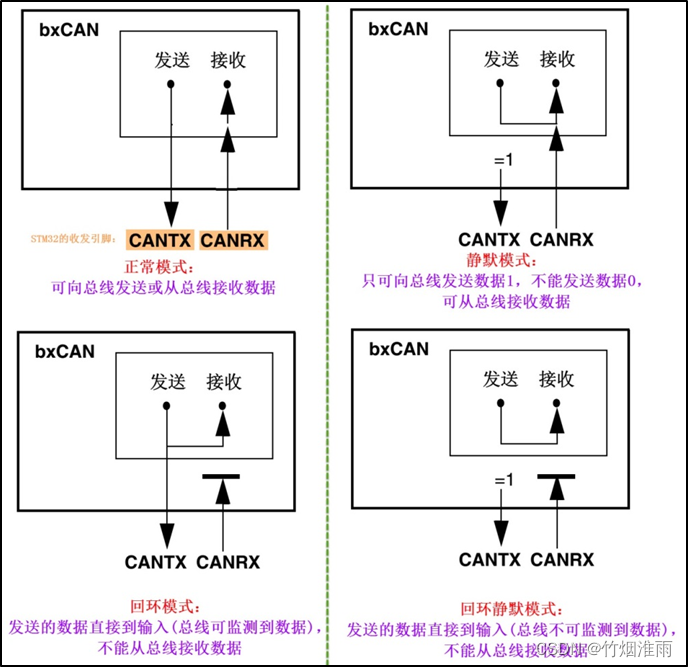
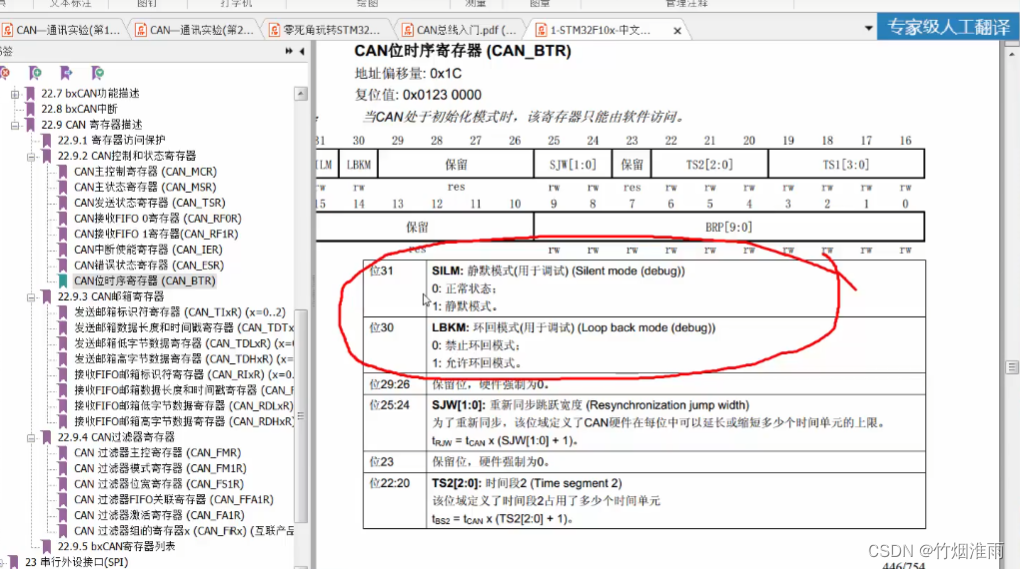
为方便调试,STM32的CAN提供了测试模式,配置位时序寄存器CAN_BTR的SILM及LBKM寄存器位可以控制使用正常模式、静默模式、回环模式及静默回环模式
通过位时序寄存器来进行配置
- 正常模式
正常模式下就是一个正常的CAN节点,可以向总线发送数据和接收数据。
- 静默模式
静默模式下,它自己的输出端的逻辑0数据会直接传输到它自己的输入端,逻辑1可以被发送到总线,所以它不能向总线发送显性位(逻辑0),只能发送隐性位(逻辑1)。输入端可以从总线接收内容。由于它只可发送的隐性位不会强制影响总线的状态,所以把它称为静默模式。这种模式一般用于监测,它可以用于分析总线上的流量,但又不会因为发送显性位而影响总线。多用于车载系统性能检测。
- 回环模式
回环模式下,它自己的输出端的所有内容都直接传输到自己的输入端,输出端的内容同时也会被传输到总线上,即也可使用总线监测它的发送内容。输入端只接收自己发送端的内容,不接收来自总线上的内容。使用回环模式可以进行自检。
- 回环静默模式
回环静默模式是以上两种模式的结合,自己的输出端的所有内容都直接传输到自己的输入端,并且不会向总线发送显性位影响总线,不能通过总线监测它的发送内容。输入端只接收自己发送端的内容,不接收来自总线上的内容。这种方式可以在“热自检”时使用,即自我检查的时候,不会干扰总线。
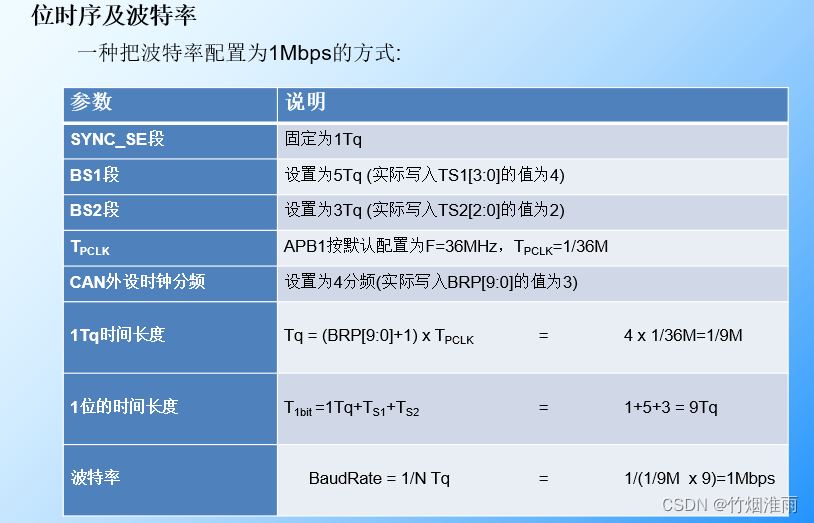
位时序及波特率
STM32外设定义的位时序与前面解释的CAN标准时序有一点区别:
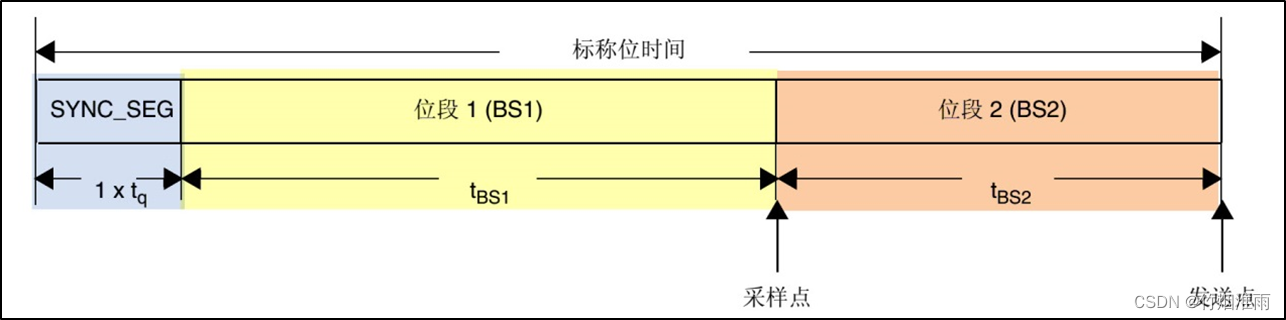
STM32的CAN外设位时序中只包含3段,分别是同步段SYNC_SEG、位段BS1及位段BS2,采样点位于BS1及BS2段的交界处。其中SYNC_SEG段固定长度为1Tq,而BS1及BS2段可以在位时序寄存器CAN_BTR设置它们的时间长度,它们可以在重新同步期间增长或缩短,该长度SJW也可在位时序寄存器中配置。
理解STM32的CAN外设的位时序时,可以把它的BS1段理解为是由CAN标准协议中PTS段与PBS1段合在一起的,而BS2段就相当于PBS2段。
它们的时间也是通过位时序寄存器来进行配置,比如我们的BS2设置位3Tq,TS2就要设置为2,同理TS1
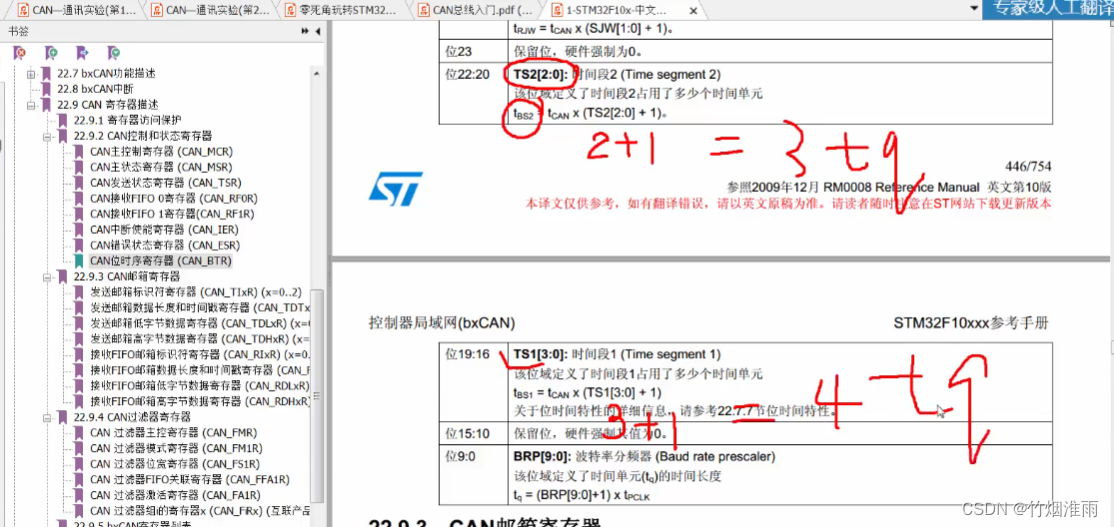
通过配置位时序寄存器CAN_BTR的TS1[3:0]及TS2[2:0]寄存器位设定BS1及BS2段的长度后,就可以确定每个CAN数据位的时间:
BS1段时间:
TS1=Tq x (TS1[3:0] + 1),
BS2段时间:
TS2= Tq x (TS2[2:0] + 1),
一个数据位的时间:
T1bit =1Tq+TS1+TS2 =1+ (TS1[3:0] + 1)+ (TS2[2:0] + 1)= N Tq
其中单个时间片的长度Tq与CAN外设的所挂载的时钟总线及分频器配置有关,CAN1和CAN2外设都是挂载在APB1总线上的,而位时序寄存器CAN_BTR中的BRP[9:0]寄存器位可以设置CAN外设时钟的分频值 ,所以:
Tq = (BRP[9:0]+1) x TPCLK
其中的PCLK指APB1时钟,默认值为36MHz。
最终可以计算出CAN通讯的波特率:
BaudRate = 1/N Tq
CAN发送邮箱
CAN外设一共有3个发送邮箱,即最多可以缓存3个待发送的报文。
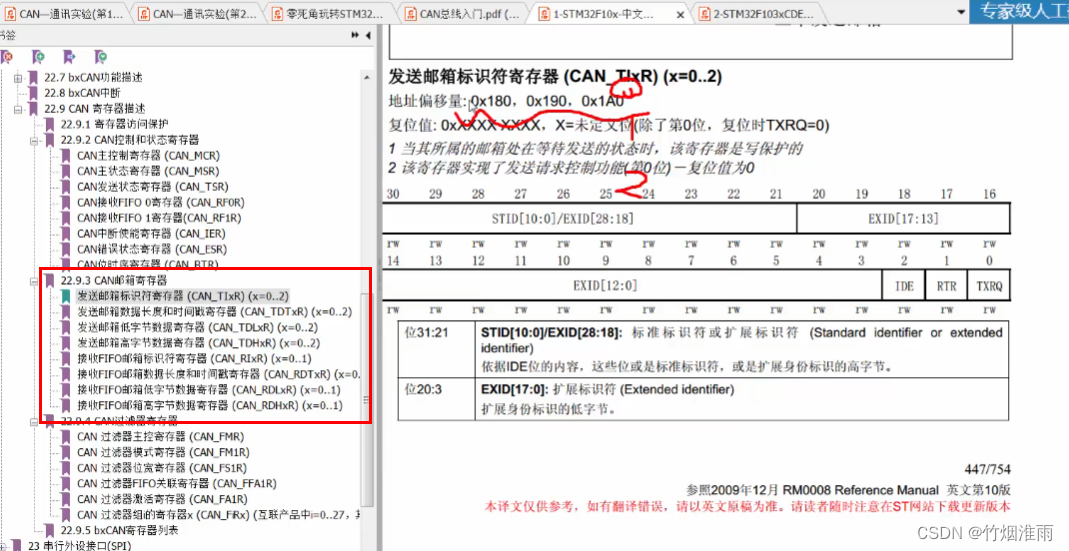
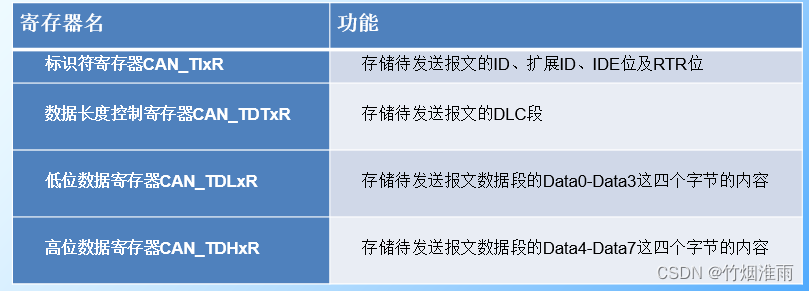
每个发送邮箱中包含有标识符寄存器CAN_TIxR、数据长度控制寄存器CAN_TDTxR及2个数据寄存器CAN_TDLxR、CAN_TDHxR,它们的功能如下:
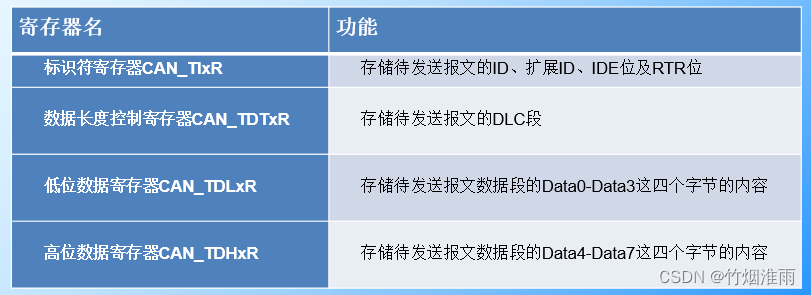
当要使用CAN外设发送报文时,把报文的各个段分解,按位置写入到这些寄存器中,并对标识符寄存器CAN_TIxR中的发送请求寄存器位TMIDxR_TXRQ置1,即可把数据发送出去。
其中标识符寄存器CAN_TIxR中的STDID寄存器位比较特别。CAN的标准标识符的总位数为11位,而扩展标识符的总位数为29位的。当报文使用扩展标识符的时候,标识符寄存器CAN_TIxR中的STDID[10:0]等效于EXTID[18:28]位,它与EXTID[17:0]共同组成完整的29位扩展标识符。
CAN接收FIFO
CAN外设一共有2个接收FIFO,每个FIFO中有3个邮箱,即最多可以缓存6个接收到的报文。当接收到报文时,FIFO的报文计数器会自增,而STM32内部读取FIFO数据之后,报文计数器会自减,通过状态寄存器可获知报文计数器的值,而通过前面主控制寄存器的RFLM位,可设置锁定模式,锁定模式下FIFO溢出时会丢弃新报文,非锁定模式下FIFO溢出时新报文会覆盖旧报文。
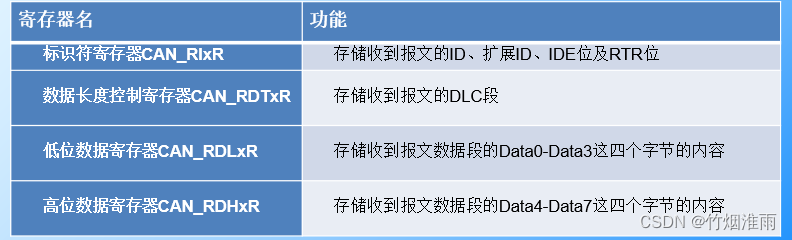
跟发送邮箱类似,每个接收FIFO中包含有标识符寄存器CAN_RIxR、数据长度控制寄存器CAN_RDTxR及2个数据寄存器CAN_RDLxR、CAN_RDHxR,其功能如下:
验收筛选器(重点)
CAN外设的验收筛选器,一共有28个筛选器组,每个筛选器组有2个寄存器,CAN1和CAN2共用的筛选器的。
在 CAN 协议中,消息的标识符与节点地址无关,但与消息内容有关。因此,发送节点将报文广播给所有接收器时,接收节点会根据报文标识符的值来确定软件是否需要该消息,为了简化软件的工作,STM32的CAN外设接收报文前会先使用验收筛选器检查,只接收需要的报文到FIFO中。
筛选器工作的时候,可以调整筛选ID的长度及过滤模式。
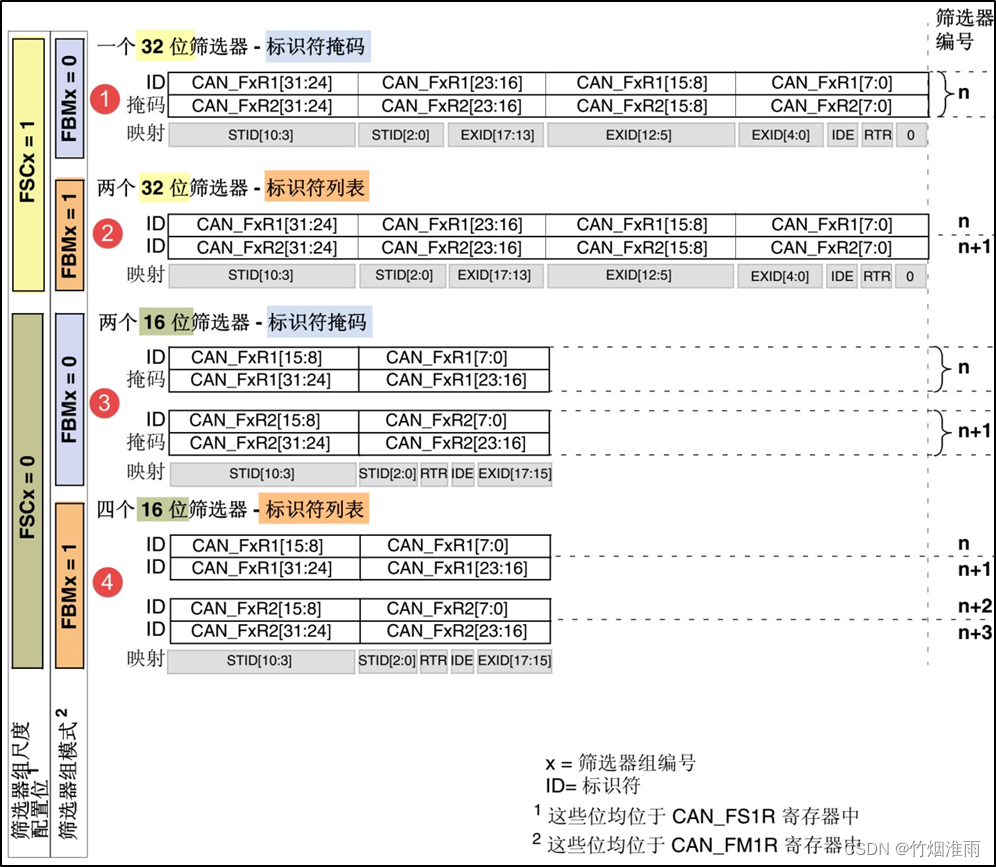
根据筛选ID长度来分类有有以下两种:
- 检查 STDID[10:0]、 EXTID[17:0]、 IDE 和 RTR 位,一共32位。
- 检查STDID[10:0]、 RTR、 IDE 和 EXTID[17:15],一共16位。
比如我们的STM32F103,一共有14组筛选器组。如果工作在32位,就只能过滤14个ID;但如果工作在16位,就可以过滤28个ID
而根据过滤的方法分为以下两种模式:
- 标识符列表模式,它把要接收报文的ID列成一个表,要求报文ID与列表中的某一个标识符完全相同才可以接收,可以理解为白名单管理。
- 掩码模式,它把可接收报文ID的某几位作为列表,这几位被称为掩码,可以把它理解成关键字搜索,只要掩码(关键字)相同,就符合要求,报文就会被保存到接收FIFO。
要注意F103只有0-13组,F105互联型产品才有0-27组
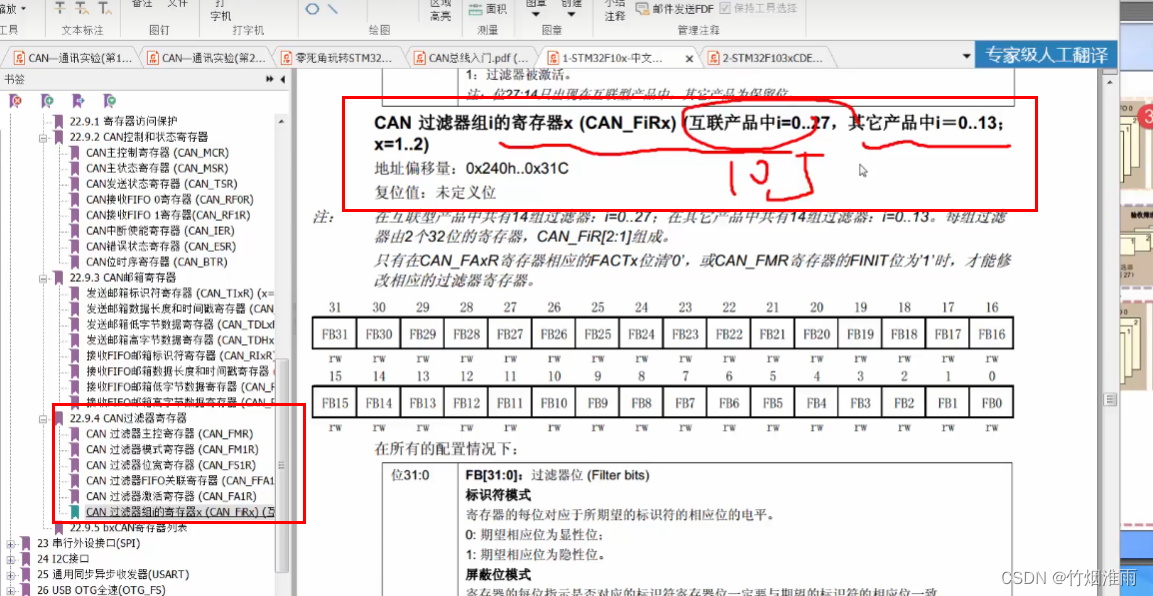
通过配置筛选尺度寄存器CAN_FS1R的FSCx位可以设置筛选器工作在哪个尺度。
通过配置筛选模式寄存器CAN_FM1R的FBMx位可以设置筛选器工作在哪个模式。
每组筛选器包含2个32位的寄存器,分别为CAN_FxR1和CAN_FxR2,它们用来存储要筛选的ID或掩码,各个寄存器位代表的意义与图中两个寄存器下面“映射”的一栏一致,各个模式的说明如下:

筛选器设置举例:
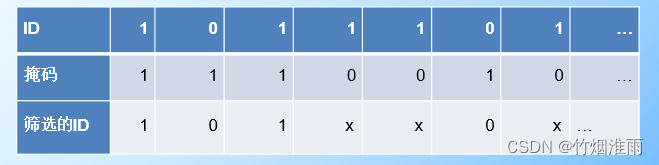
如在掩码模式时,第一个寄存器存储要筛选的ID,第二个寄存器存储掩码,掩码为1的部分表示该位必须与ID中的内容一致,筛选的结果为表中第三行的ID值,它是一组包含多个的ID值,其中x表示该位可以为1可以为0。
如工作在标识符模式时,2个寄存器存储的都是要筛选的ID,它只包含2个要筛选的ID值(32位模式时)。
如果使能了筛选器,且报文的ID与所有筛选器的配置都不匹配,CAN外设会丢弃该报文,不存入接收FIFO。
整体控制逻辑
CAN2外设的结构与CAN1外设是一样的,它们共用筛选器,且由于存储访问控制器由CAN1控制,所以要使用CAN2的时候必须要使能CAN1的时钟。