目录
- 一、环境准备
- 1.进入ModelArts官网
- 2.使用CodeLab体验Notebook实例
- 二、环境准备与数据读取
- 三、模型解析
- Transformer基本原理
- Attention模块
- Transformer Encoder
- ViT模型的输入
- 整体构建ViT
- 四、模型训练与推理
- 模型训练
- 模型验证
- 模型推理
近些年,随着基于自注意(Self-Attention)结构的模型的发展,特别是Transformer模型的提出,极大地促进了自然语言处理模型的发展。由于Transformers的计算效率和可扩展性,它已经能够训练具有超过100B参数的空前规模的模型。
ViT则是自然语言处理和计算机视觉两个领域的融合结晶。在不依赖卷积操作的情况下,依然可以在图像分类任务上达到很好的效果。
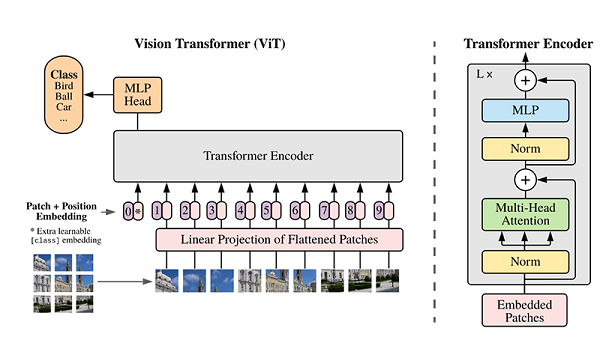
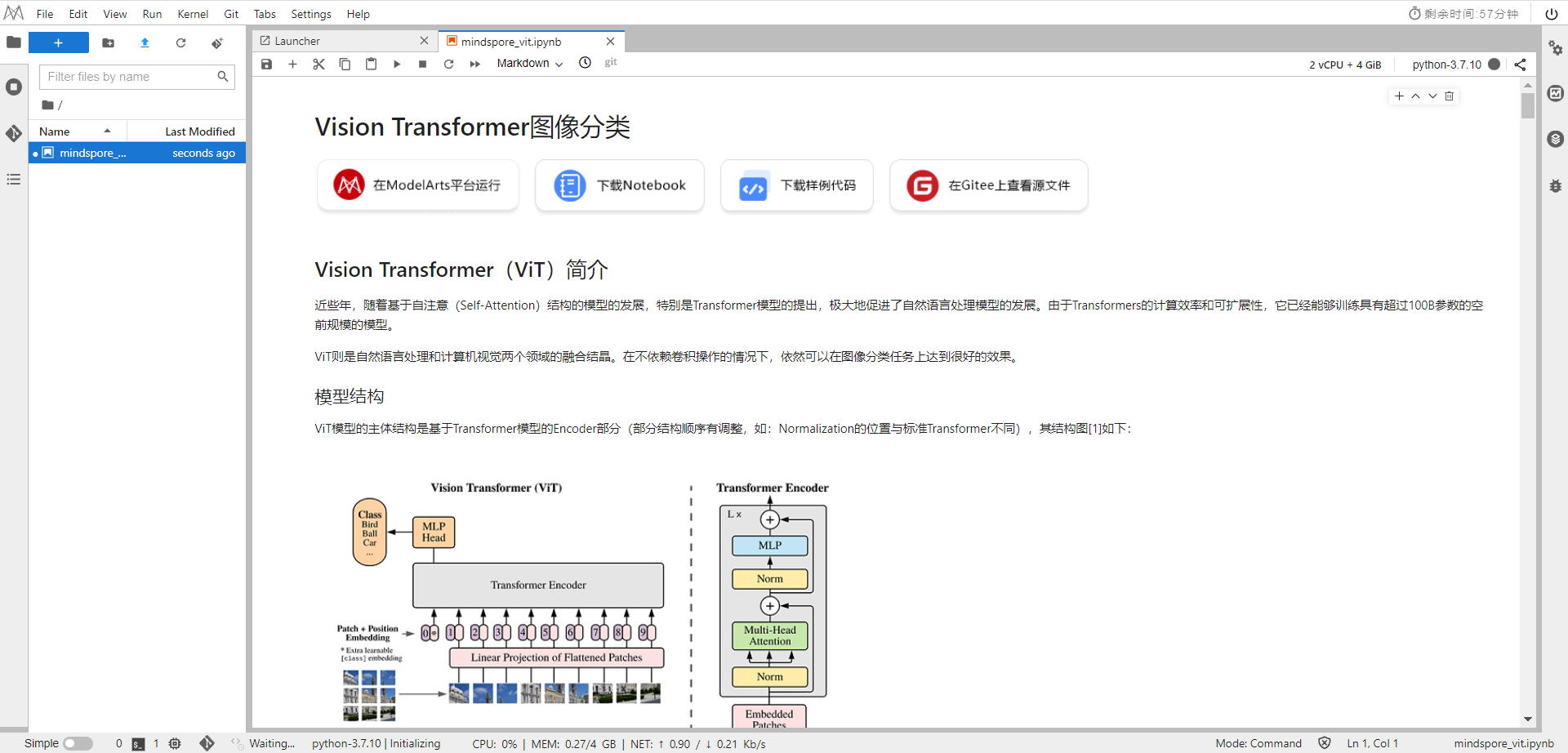
模型结构
ViT模型的主体结构是基于Transformer模型的Encoder部分(部分结构顺序有调整,如:Normalization的位置与标准Transformer不同),其结构图[1]如下:
模型特点
ViT模型主要应用于图像分类领域。因此,其模型结构相较于传统的Transformer有以下几个特点:
数据集的原图像被划分为多个patch后,将二维patch(不考虑channel)转换为一维向量,再加上类别向量与位置向量作为模型输入。
模型主体的Block结构是基于Transformer的Encoder结构,但是调整了Normalization的位置,其中,最主要的结构依然是Multi-head Attention结构。
模型在Blocks堆叠后接全连接层,接受类别向量的输出作为输入并用于分类。通常情况下,我们将最后的全连接层称为Head,Transformer Encoder部分为backbone。
下面将通过代码实例来详细解释基于ViT实现ImageNet分类任务。
如果你对MindSpore感兴趣,可以关注昇思MindSpore社区


一、环境准备
1.进入ModelArts官网
云平台帮助用户快速创建和部署模型,管理全周期AI工作流,选择下面的云平台以开始使用昇思MindSpore,获取安装命令,安装MindSpore2.0.0-alpha版本,可以在昇思教程中进入ModelArts官网
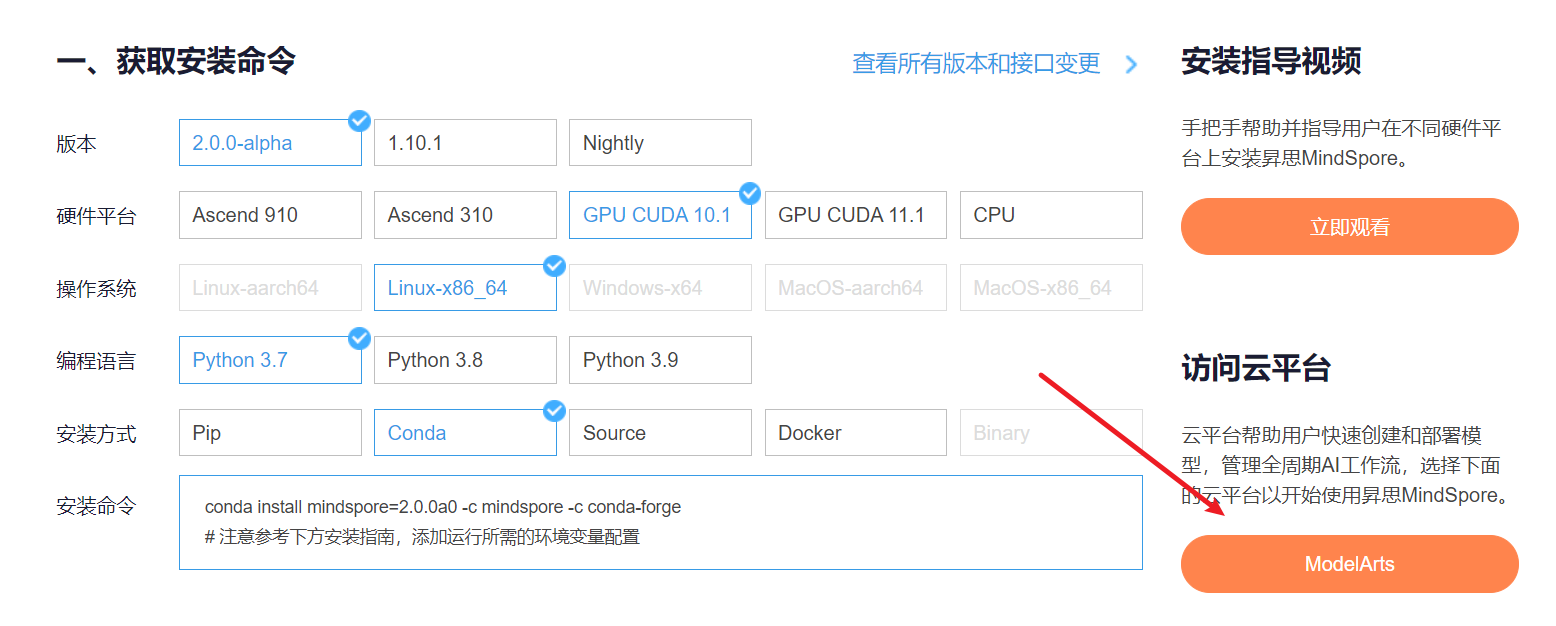
选择下方CodeLab立即体验
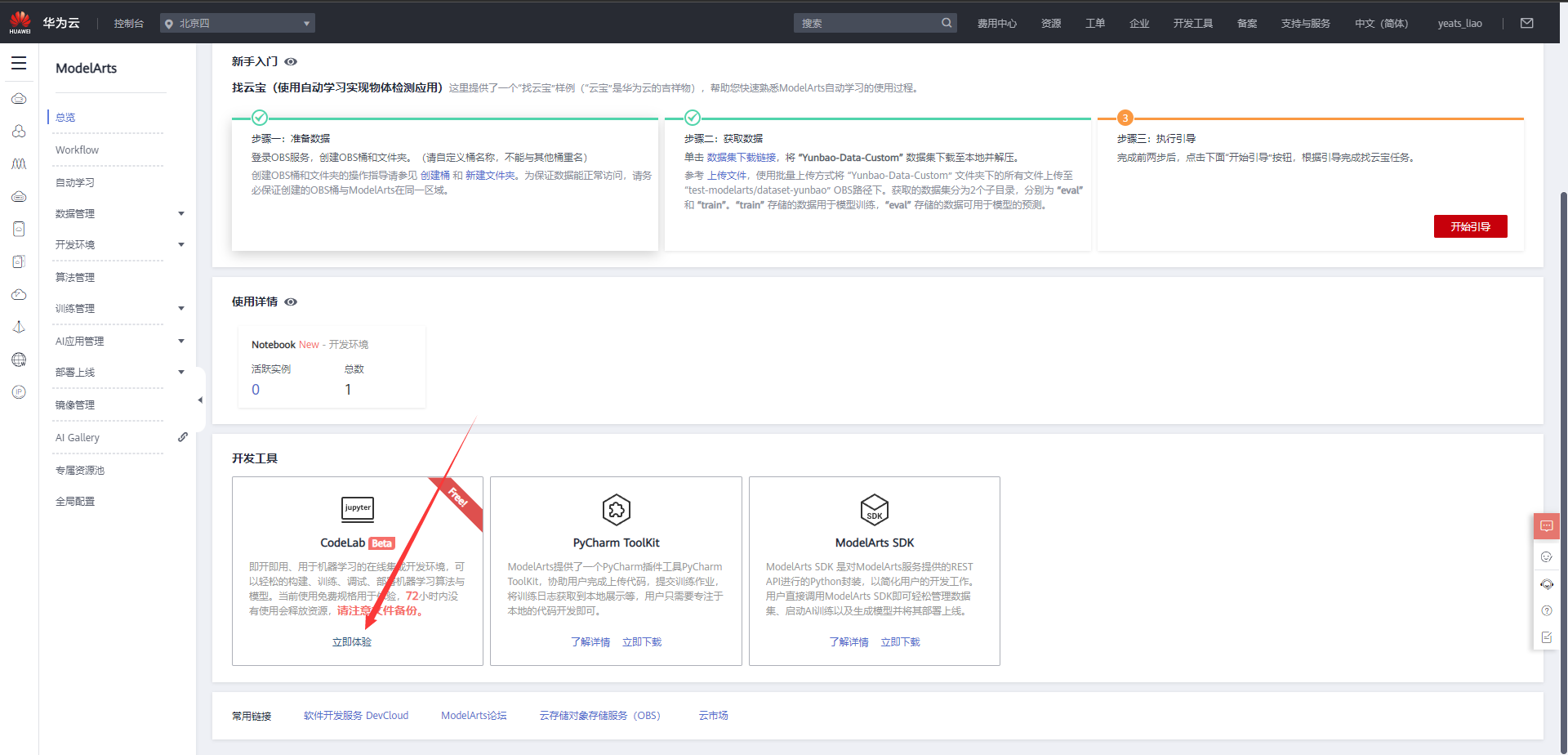
等待环境搭建完成
2.使用CodeLab体验Notebook实例
下载NoteBook样例代码,Vision Transformer图像分类 ,.ipynb为样例代码
选择ModelArts Upload Files上传.ipynb文件
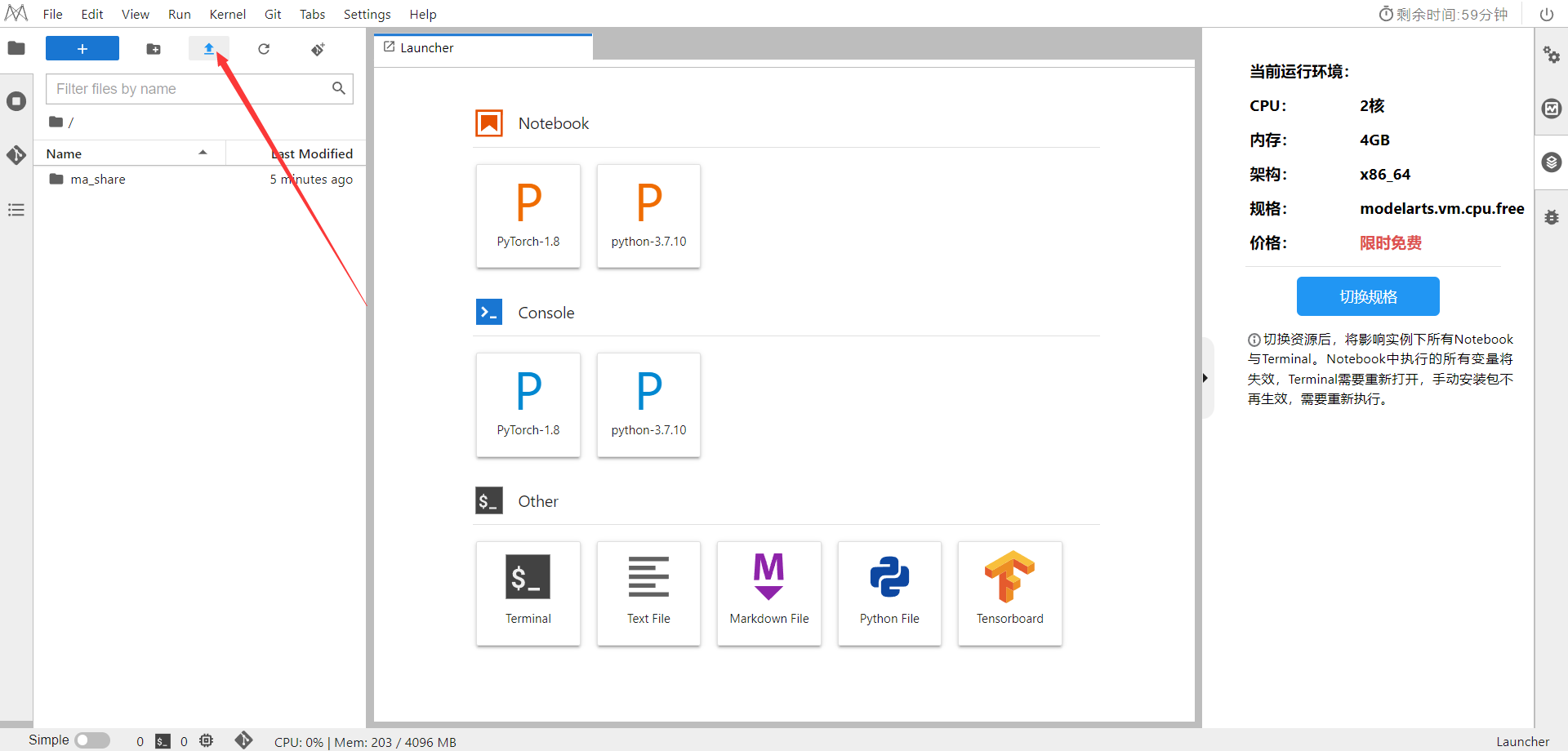
选择Kernel环境
切换至GPU环境,切换成第一个限时免费
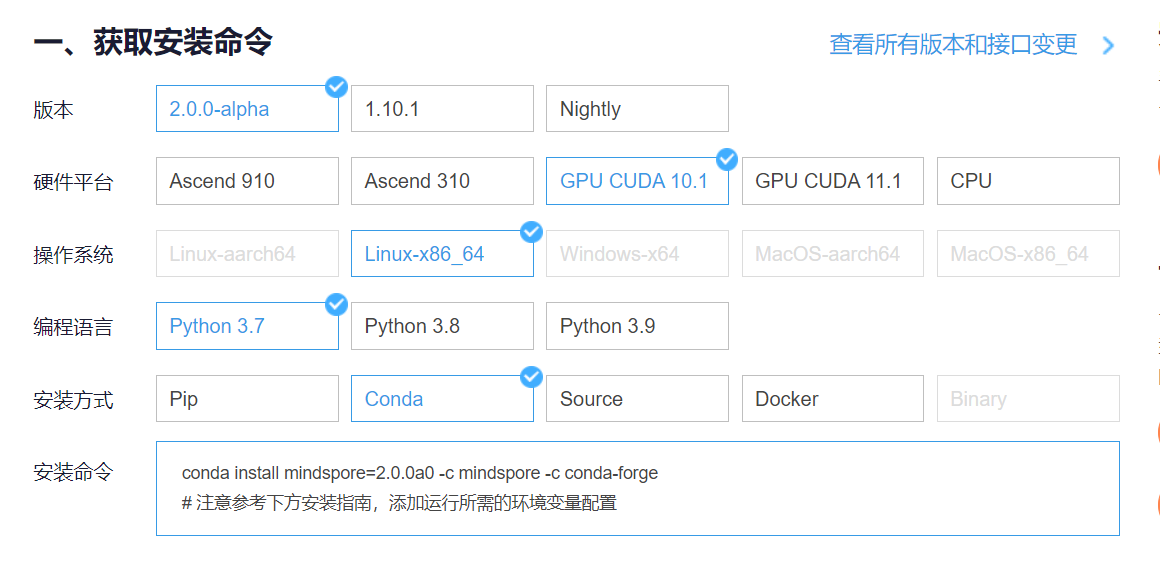
进入昇思MindSpore官网,点击上方的安装

获取安装命令
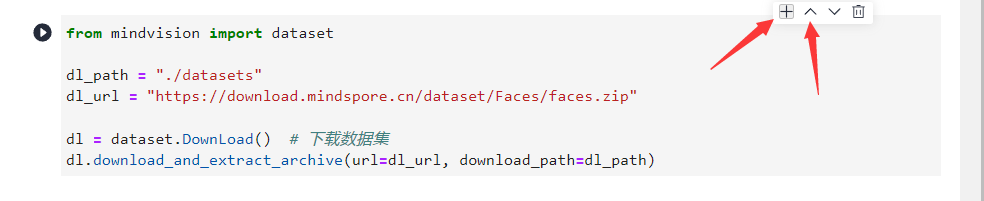
回到Notebook中,在第一块代码前加入命令
conda update -n base -c defaults conda
安装MindSpore 2.0 GPU版本
conda install mindspore=2.0.0a0 -c mindspore -c conda-forge
安装mindvision
pip install mindvision
安装下载download
pip install download
二、环境准备与数据读取
开始实验之前,请确保本地已经安装了Python环境并安装了MindSpore。
首先我们需要下载本案例的数据集,可通过http://image-net.org下载完整的ImageNet数据集,本案例应用的数据集是从ImageNet中筛选出来的子集。
运行第一段代码时会自动下载并解压,请确保你的数据集路径如以下结构。
.dataset/
├── ILSVRC2012_devkit_t12.tar.gz
├── train/
├── infer/
└── val/
from download import download
dataset_url = "https://mindspore-website.obs.cn-north-4.myhuaweicloud.com/notebook/datasets/vit_imagenet_dataset.zip"
path = "./"
path = download(dataset_url, path, kind="zip", replace=True)

import os
import mindspore as ms
from mindspore.dataset import ImageFolderDataset
import mindspore.dataset.vision as transforms
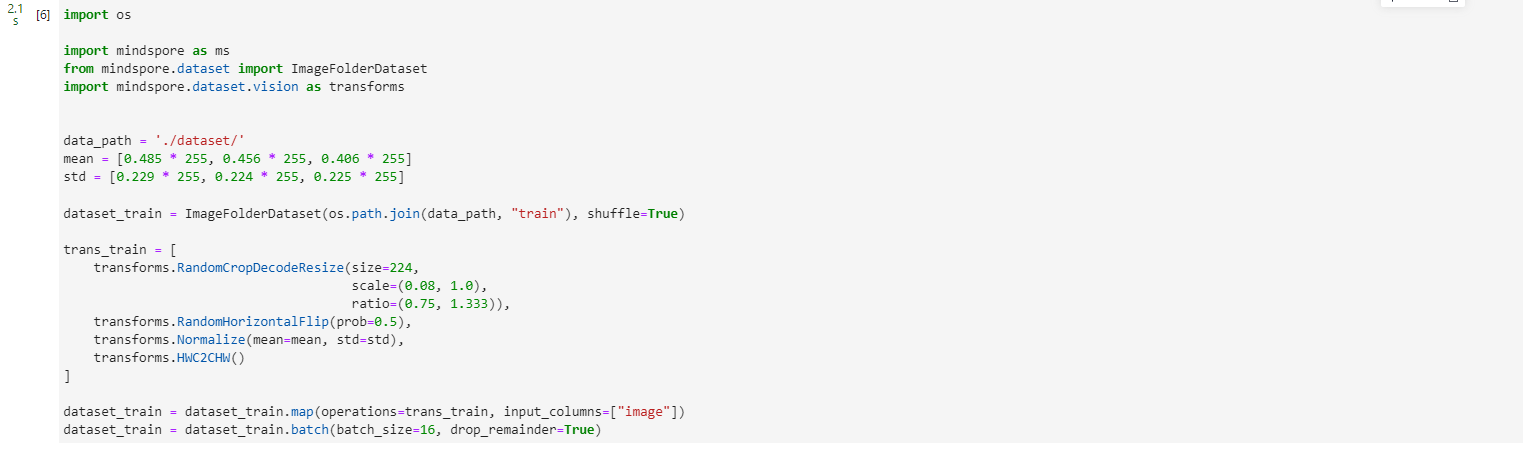
data_path = './dataset/'
mean = [0.485 * 255, 0.456 * 255, 0.406 * 255]
std = [0.229 * 255, 0.224 * 255, 0.225 * 255]
dataset_train = ImageFolderDataset(os.path.join(data_path, "train"), shuffle=True)
trans_train = [
transforms.RandomCropDecodeResize(size=224,
scale=(0.08, 1.0),
ratio=(0.75, 1.333)),
transforms.RandomHorizontalFlip(prob=0.5),
transforms.Normalize(mean=mean, std=std),
transforms.HWC2CHW()
]
dataset_train = dataset_train.map(operations=trans_train, input_columns=["image"])
dataset_train = dataset_train.batch(batch_size=16, drop_remainder=True)
三、模型解析
下面将通过代码来细致剖析ViT模型的内部结构。
Transformer基本原理
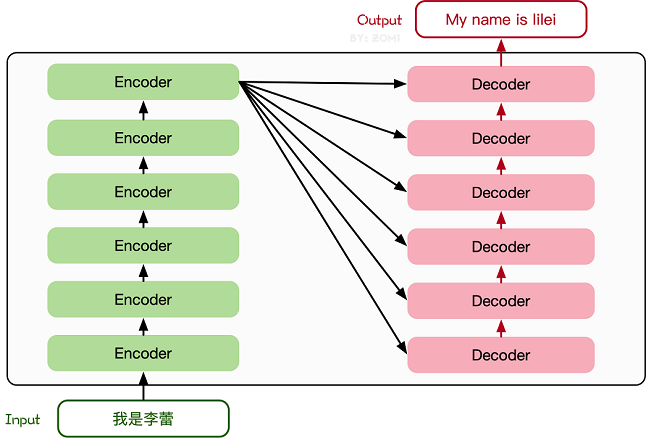
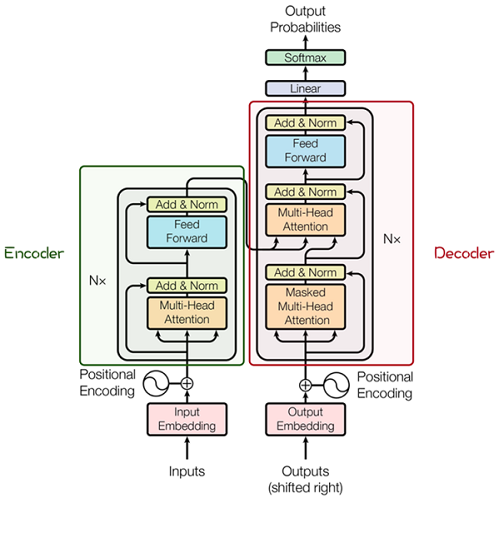
Transformer模型源于2017年的一篇文章[2]。在这篇文章中提出的基于Attention机制的编码器-解码器型结构在自然语言处理领域获得了巨大的成功。模型结构如下图所示:
其主要结构为多个Encoder和Decoder模块所组成,其中Encoder和Decoder的详细结构如下图[2]所示:
Encoder与Decoder由许多结构组成,如:多头注意力(Multi-Head Attention)层,Feed
Forward层,Normaliztion层,甚至残差连接(Residual
Connection,图中的“Add”)。不过,其中最重要的结构是多头注意力(Multi-Head
Attention)结构,该结构基于自注意力(Self-Attention)机制,是多个Self-Attention的并行组成。所以,理解了Self-Attention就抓住了Transformer的核心。
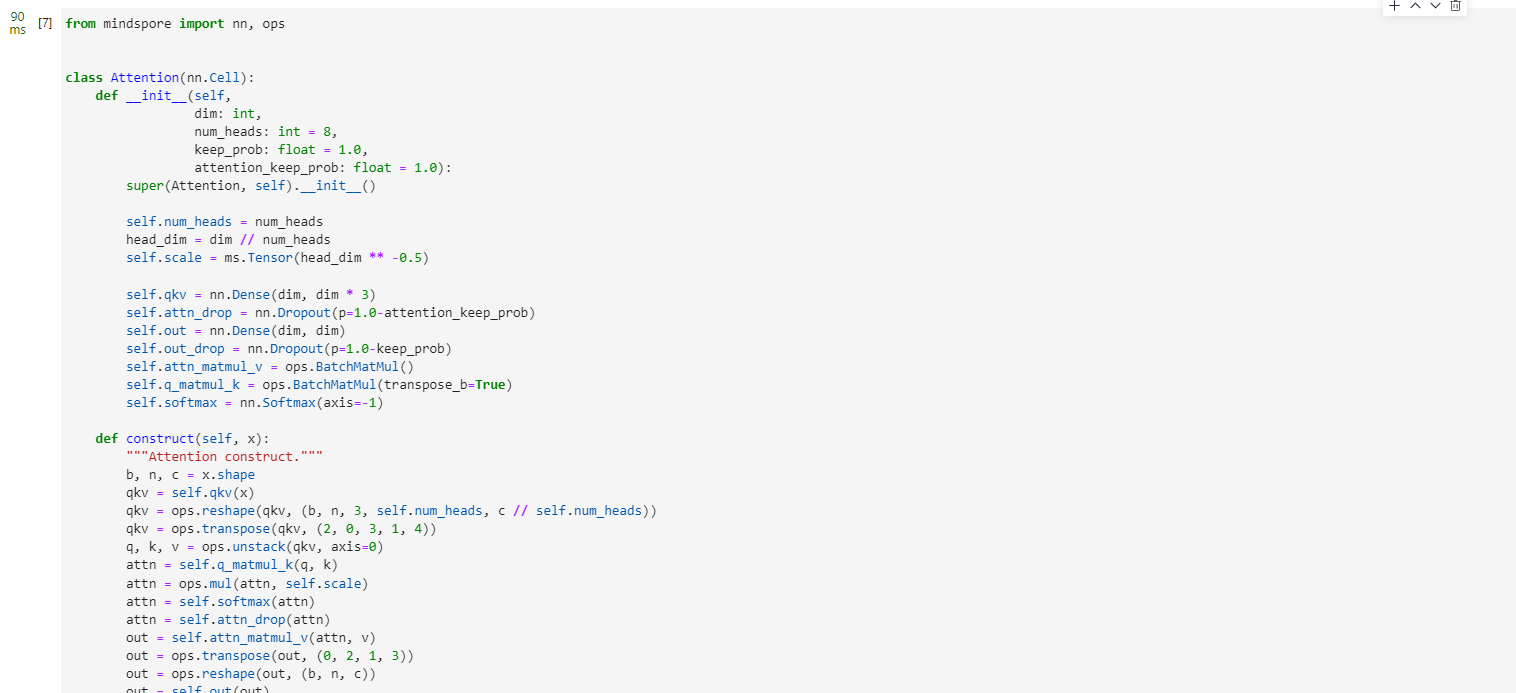
Attention模块
from mindspore import nn, ops
class Attention(nn.Cell):
def __init__(self,
dim: int,
num_heads: int = 8,
keep_prob: float = 1.0,
attention_keep_prob: float = 1.0):
super(Attention, self).__init__()
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = ms.Tensor(head_dim ** -0.5)
self.qkv = nn.Dense(dim, dim * 3)
self.attn_drop = nn.Dropout(p=1.0-attention_keep_prob)
self.out = nn.Dense(dim, dim)
self.out_drop = nn.Dropout(p=1.0-keep_prob)
self.attn_matmul_v = ops.BatchMatMul()
self.q_matmul_k = ops.BatchMatMul(transpose_b=True)
self.softmax = nn.Softmax(axis=-1)
def construct(self, x):
"""Attention construct."""
b, n, c = x.shape
qkv = self.qkv(x)
qkv = ops.reshape(qkv, (b, n, 3, self.num_heads, c // self.num_heads))
qkv = ops.transpose(qkv, (2, 0, 3, 1, 4))
q, k, v = ops.unstack(qkv, axis=0)
attn = self.q_matmul_k(q, k)
attn = ops.mul(attn, self.scale)
attn = self.softmax(attn)
attn = self.attn_drop(attn)
out = self.attn_matmul_v(attn, v)
out = ops.transpose(out, (0, 2, 1, 3))
out = ops.reshape(out, (b, n, c))
out = self.out(out)
out = self.out_drop(out)
return out
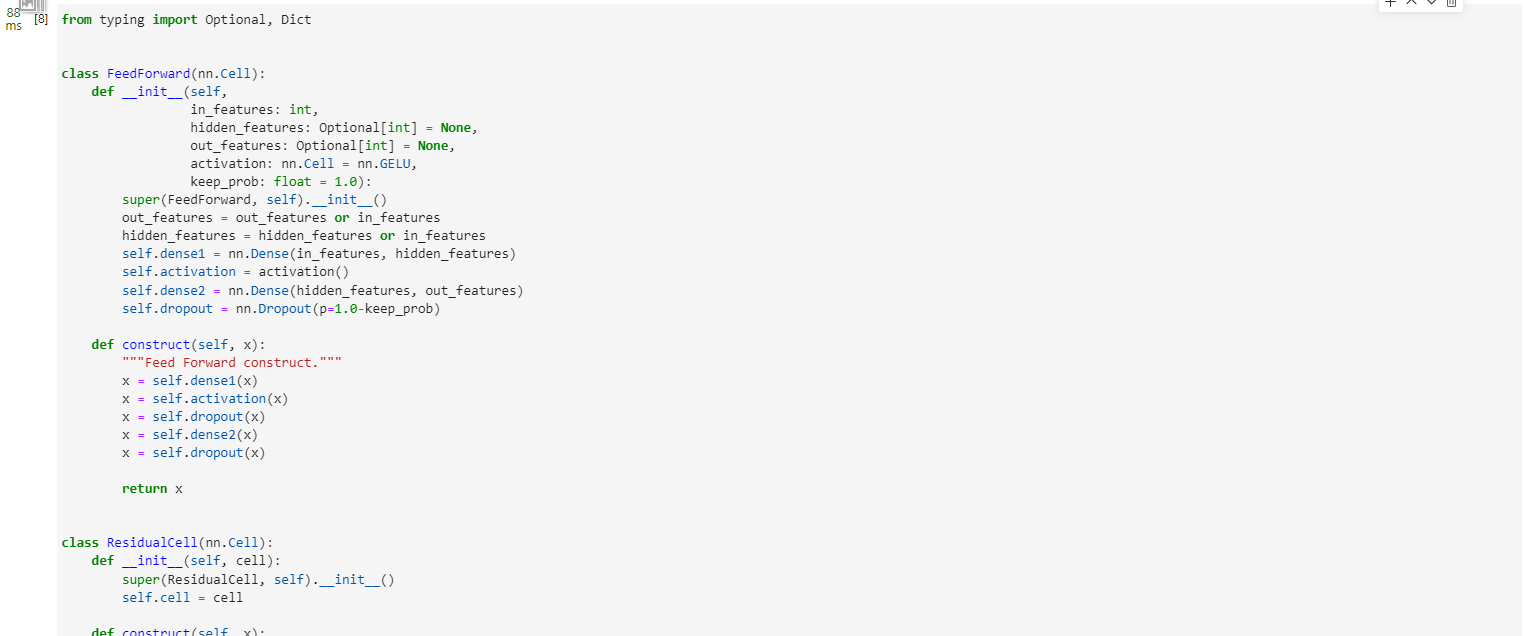
Transformer Encoder
在了解了Self-Attention结构之后,通过与Feed Forward,Residual
Connection等结构的拼接就可以形成Transformer的基础结构,下面代码实现了Feed Forward,Residual
Connection结构。
from typing import Optional, Dict
class FeedForward(nn.Cell):
def __init__(self,
in_features: int,
hidden_features: Optional[int] = None,
out_features: Optional[int] = None,
activation: nn.Cell = nn.GELU,
keep_prob: float = 1.0):
super(FeedForward, self).__init__()
out_features = out_features or in_features
hidden_features = hidden_features or in_features
self.dense1 = nn.Dense(in_features, hidden_features)
self.activation = activation()
self.dense2 = nn.Dense(hidden_features, out_features)
self.dropout = nn.Dropout(p=1.0-keep_prob)
def construct(self, x):
"""Feed Forward construct."""
x = self.dense1(x)
x = self.activation(x)
x = self.dropout(x)
x = self.dense2(x)
x = self.dropout(x)
return x
class ResidualCell(nn.Cell):
def __init__(self, cell):
super(ResidualCell, self).__init__()
self.cell = cell
def construct(self, x):
"""ResidualCell construct."""
return self.cell(x) + x
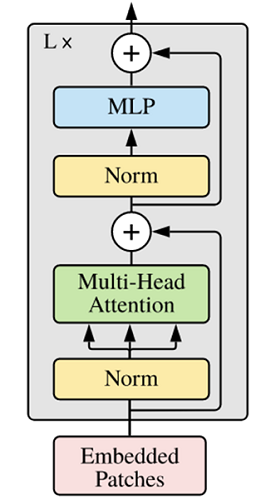
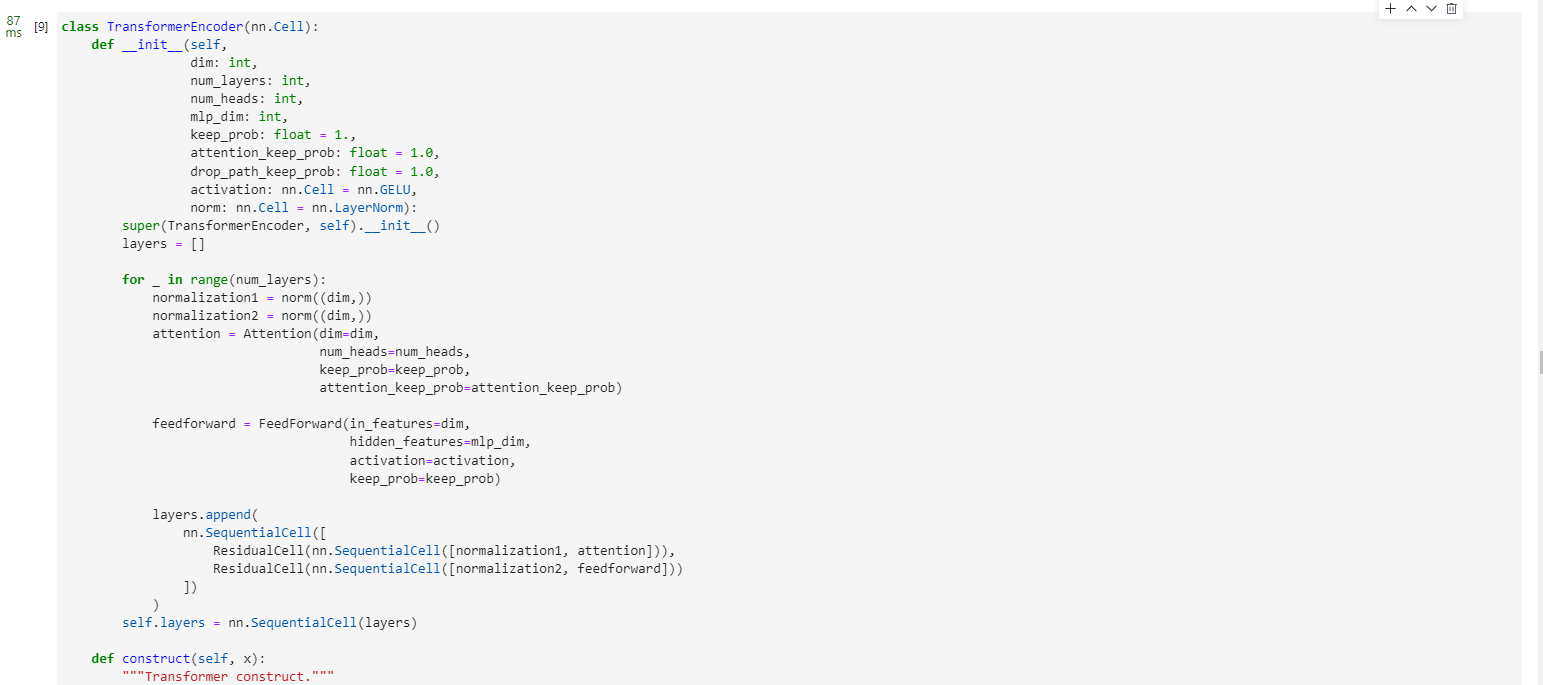
接下来就利用Self-Attention来构建ViT模型中的TransformerEncoder部分,类似于构建了一个Transformer的编码器部分,如下图[1]所示:
vit-encoder
ViT模型中的基础结构与标准Transformer有所不同,主要在于Normalization的位置是放在Self-Attention和Feed
Forward之前,其他结构如Residual Connection,Feed
Forward,Normalization都如Transformer中所设计。从Transformer结构的图片可以发现,多个子encoder的堆叠就完成了模型编码器的构建,在ViT模型中,依然沿用这个思路,通过配置超参数num_layers,就可以确定堆叠层数。
Residual
Connection,Normalization的结构可以保证模型有很强的扩展性(保证信息经过深层处理不会出现退化的现象,这是Residual
Connection的作用),Normalization和dropout的应用可以增强模型泛化能力。从以下源码中就可以清晰看到Transformer的结构。将TransformerEncoder结构和一个多层感知器(MLP)结合,就构成了ViT模型的backbone部分。
class TransformerEncoder(nn.Cell):
def __init__(self,
dim: int,
num_layers: int,
num_heads: int,
mlp_dim: int,
keep_prob: float = 1.,
attention_keep_prob: float = 1.0,
drop_path_keep_prob: float = 1.0,
activation: nn.Cell = nn.GELU,
norm: nn.Cell = nn.LayerNorm):
super(TransformerEncoder, self).__init__()
layers = []
for _ in range(num_layers):
normalization1 = norm((dim,))
normalization2 = norm((dim,))
attention = Attention(dim=dim,
num_heads=num_heads,
keep_prob=keep_prob,
attention_keep_prob=attention_keep_prob)
feedforward = FeedForward(in_features=dim,
hidden_features=mlp_dim,
activation=activation,
keep_prob=keep_prob)
layers.append(
nn.SequentialCell([
ResidualCell(nn.SequentialCell([normalization1, attention])),
ResidualCell(nn.SequentialCell([normalization2, feedforward]))
])
)
self.layers = nn.SequentialCell(layers)
def construct(self, x):
"""Transformer construct."""
return self.layers(x)
ViT模型的输入
传统的Transformer结构主要用于处理自然语言领域的词向量(Word Embedding or Word Vector),词向量与传统图像数据的主要区别在于,词向量通常是一维向量进行堆叠,而图片则是二维矩阵的堆叠,多头注意力机制在处理一维词向量的堆叠时会提取词向量之间的联系也就是上下文语义,这使得Transformer在自然语言处理领域非常好用,而二维图片矩阵如何与一维词向量进行转化就成为了Transformer进军图像处理领域的一个小门槛。
在ViT模型中:
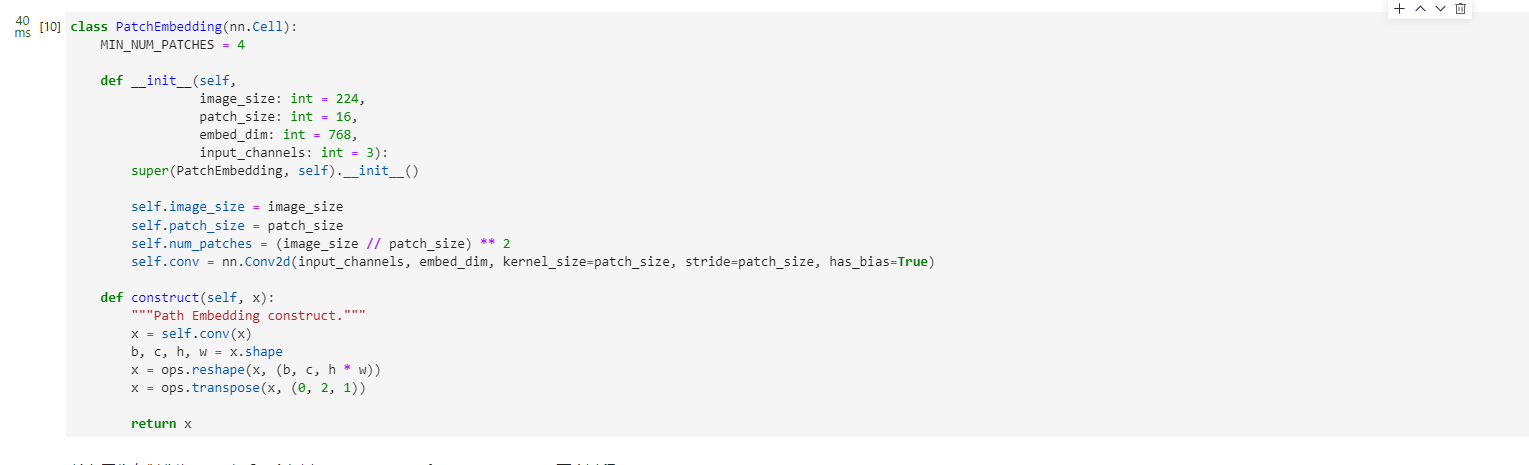
通过将输入图像在每个channel上划分为16*16个patch,这一步是通过卷积操作来完成的,当然也可以人工进行划分,但卷积操作也可以达到目的同时还可以进行一次而外的数据处理;例如一幅输入224
x 224的图像,首先经过卷积处理得到16 x 16个patch,那么每一个patch的大小就是14 x 14。
再将每一个patch的矩阵拉伸成为一个一维向量,从而获得了近似词向量堆叠的效果。上一步得到的14 x 14的patch就转换为长度为196的向量。
这是图像输入网络经过的第一步处理。具体Patch Embedding的代码如下所示:
class PatchEmbedding(nn.Cell):
MIN_NUM_PATCHES = 4
def __init__(self,
image_size: int = 224,
patch_size: int = 16,
embed_dim: int = 768,
input_channels: int = 3):
super(PatchEmbedding, self).__init__()
self.image_size = image_size
self.patch_size = patch_size
self.num_patches = (image_size // patch_size) ** 2
self.conv = nn.Conv2d(input_channels, embed_dim, kernel_size=patch_size, stride=patch_size, has_bias=True)
def construct(self, x):
"""Path Embedding construct."""
x = self.conv(x)
b, c, h, w = x.shape
x = ops.reshape(x, (b, c, h * w))
x = ops.transpose(x, (0, 2, 1))
return x
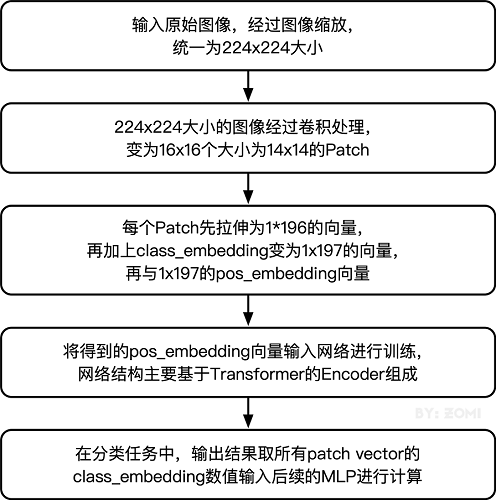
输入图像在划分为patch之后,会经过pos_embedding 和 class_embedding两个过程。
class_embedding主要借鉴了BERT模型的用于文本分类时的思想,在每一个word
vector之前增加一个类别值,通常是加在向量的第一位,上一步得到的196维的向量加上class_embedding后变为197维。增加的class_embedding是一个可以学习的参数,经过网络的不断训练,最终以输出向量的第一个维度的输出来决定最后的输出类别;由于输入是16 x 16个patch,所以输出进行分类时是取 16 x 16个class_embedding进行分类。
pos_embedding也是一组可以学习的参数,会被加入到经过处理的patch矩阵中。
由于pos_embedding也是可以学习的参数,所以它的加入类似于全链接网络和卷积的bias。这一步就是创造一个长度维197的可训练向量加入到经过class_embedding的向量中。
实际上,pos_embedding总共有4种方案。但是经过作者的论证,只有加上pos_embedding和不加pos_embedding有明显影响,至于pos_embedding是一维还是二维对分类结果影响不大,所以,在我们的代码中,也是采用了一维的pos_embedding,由于class_embedding是加在pos_embedding之前,所以pos_embedding的维度会比patch拉伸后的维度加1。
总的而言,ViT模型还是利用了Transformer模型在处理上下文语义时的优势,将图像转换为一种“变种词向量”然后进行处理,而这样转换的意义在于,多个patch之间本身具有空间联系,这类似于一种“空间语义”,从而获得了比较好的处理效果。
整体构建ViT
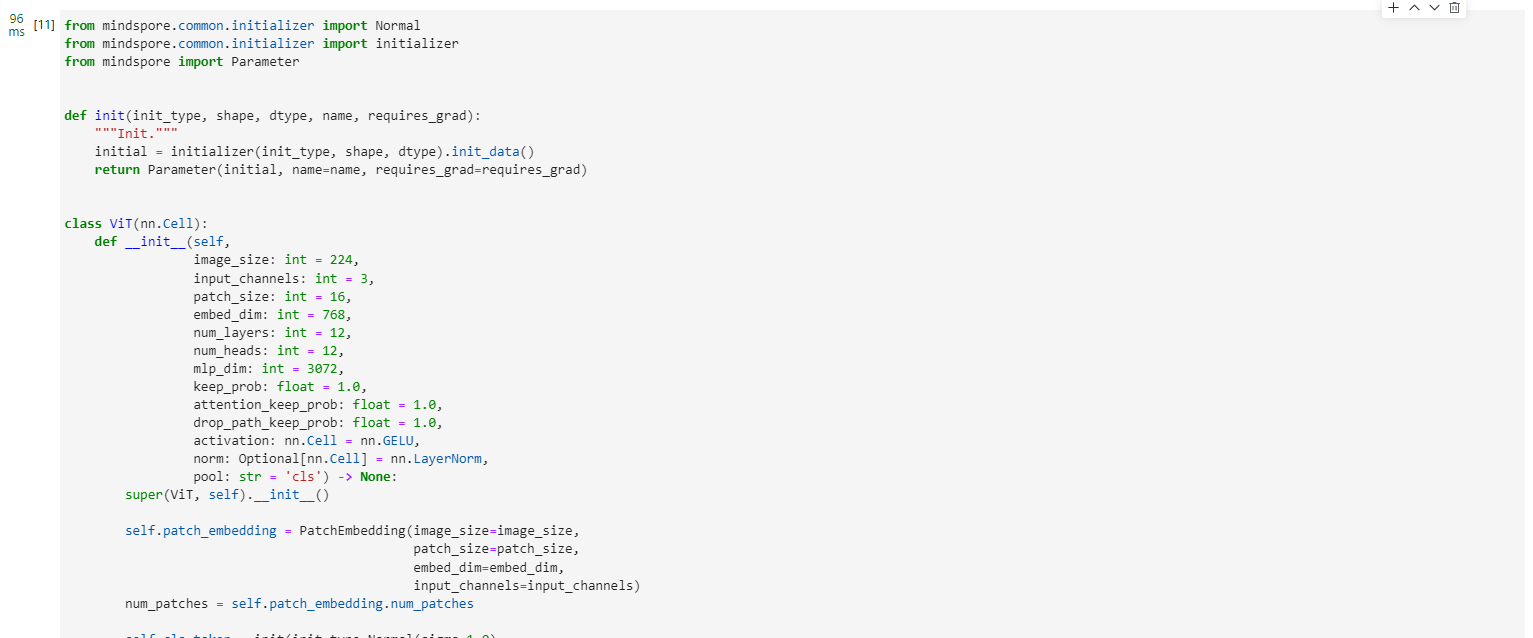
以下代码构建了一个完整的ViT模型。
from mindspore.common.initializer import Normal
from mindspore.common.initializer import initializer
from mindspore import Parameter
def init(init_type, shape, dtype, name, requires_grad):
"""Init."""
initial = initializer(init_type, shape, dtype).init_data()
return Parameter(initial, name=name, requires_grad=requires_grad)
class ViT(nn.Cell):
def __init__(self,
image_size: int = 224,
input_channels: int = 3,
patch_size: int = 16,
embed_dim: int = 768,
num_layers: int = 12,
num_heads: int = 12,
mlp_dim: int = 3072,
keep_prob: float = 1.0,
attention_keep_prob: float = 1.0,
drop_path_keep_prob: float = 1.0,
activation: nn.Cell = nn.GELU,
norm: Optional[nn.Cell] = nn.LayerNorm,
pool: str = 'cls') -> None:
super(ViT, self).__init__()
self.patch_embedding = PatchEmbedding(image_size=image_size,
patch_size=patch_size,
embed_dim=embed_dim,
input_channels=input_channels)
num_patches = self.patch_embedding.num_patches
self.cls_token = init(init_type=Normal(sigma=1.0),
shape=(1, 1, embed_dim),
dtype=ms.float32,
name='cls',
requires_grad=True)
self.pos_embedding = init(init_type=Normal(sigma=1.0),
shape=(1, num_patches + 1, embed_dim),
dtype=ms.float32,
name='pos_embedding',
requires_grad=True)
self.pool = pool
self.pos_dropout = nn.Dropout(p=1.0-keep_prob)
self.norm = norm((embed_dim,))
self.transformer = TransformerEncoder(dim=embed_dim,
num_layers=num_layers,
num_heads=num_heads,
mlp_dim=mlp_dim,
keep_prob=keep_prob,
attention_keep_prob=attention_keep_prob,
drop_path_keep_prob=drop_path_keep_prob,
activation=activation,
norm=norm)
self.dropout = nn.Dropout(p=1.0-keep_prob)
self.dense = nn.Dense(embed_dim, num_classes)
def construct(self, x):
"""ViT construct."""
x = self.patch_embedding(x)
cls_tokens = ops.tile(self.cls_token.astype(x.dtype), (x.shape[0], 1, 1))
x = ops.concat((cls_tokens, x), axis=1)
x += self.pos_embedding
x = self.pos_dropout(x)
x = self.transformer(x)
x = self.norm(x)
x = x[:, 0]
if self.training:
x = self.dropout(x)
x = self.dense(x)
return x
整体流程图如下所示:
四、模型训练与推理
模型训练
from mindspore.nn import LossBase
from mindspore.train import LossMonitor, TimeMonitor, CheckpointConfig, ModelCheckpoint
from mindspore import train
# define super parameter
epoch_size = 10
momentum = 0.9
num_classes = 1000
resize = 224
step_size = dataset_train.get_dataset_size()
# construct model
network = ViT()
# load ckpt
vit_url = "https://download.mindspore.cn/vision/classification/vit_b_16_224.ckpt"
path = "./ckpt/vit_b_16_224.ckpt"
vit_path = download(vit_url, path, replace=True)
param_dict = ms.load_checkpoint(vit_path)
ms.load_param_into_net(network, param_dict)
# define learning rate
lr = nn.cosine_decay_lr(min_lr=float(0),
max_lr=0.00005,
total_step=epoch_size * step_size,
step_per_epoch=step_size,
decay_epoch=10)
# define optimizer
network_opt = nn.Adam(network.trainable_params(), lr, momentum)
# define loss function
class CrossEntropySmooth(LossBase):
"""CrossEntropy."""
def __init__(self, sparse=True, reduction='mean', smooth_factor=0., num_classes=1000):
super(CrossEntropySmooth, self).__init__()
self.onehot = ops.OneHot()
self.sparse = sparse
self.on_value = ms.Tensor(1.0 - smooth_factor, ms.float32)
self.off_value = ms.Tensor(1.0 * smooth_factor / (num_classes - 1), ms.float32)
self.ce = nn.SoftmaxCrossEntropyWithLogits(reduction=reduction)
def construct(self, logit, label):
if self.sparse:
label = self.onehot(label, ops.shape(logit)[1], self.on_value, self.off_value)
loss = self.ce(logit, label)
return loss
network_loss = CrossEntropySmooth(sparse=True,
reduction="mean",
smooth_factor=0.1,
num_classes=num_classes)
# set checkpoint
ckpt_config = CheckpointConfig(save_checkpoint_steps=step_size, keep_checkpoint_max=100)
ckpt_callback = ModelCheckpoint(prefix='vit_b_16', directory='./ViT', config=ckpt_config)
# initialize model
# "Ascend + mixed precision" can improve performance
ascend_target = (ms.get_context("device_target") == "Ascend")
if ascend_target:
model = train.Model(network, loss_fn=network_loss, optimizer=network_opt, metrics={"acc"}, amp_level="O2")
else:
model = train.Model(network, loss_fn=network_loss, optimizer=network_opt, metrics={"acc"}, amp_level="O0")
# train model
model.train(epoch_size,
dataset_train,
callbacks=[ckpt_callback, LossMonitor(125), TimeMonitor(125)],
dataset_sink_mode=False,)
模型验证
dataset_val = ImageFolderDataset(os.path.join(data_path, "val"), shuffle=True)
trans_val = [
transforms.Decode(),
transforms.Resize(224 + 32),
transforms.CenterCrop(224),
transforms.Normalize(mean=mean, std=std),
transforms.HWC2CHW()
]
dataset_val = dataset_val.map(operations=trans_val, input_columns=["image"])
dataset_val = dataset_val.batch(batch_size=16, drop_remainder=True)
# construct model
network = ViT()
# load ckpt
param_dict = ms.load_checkpoint(vit_path)
ms.load_param_into_net(network, param_dict)
network_loss = CrossEntropySmooth(sparse=True,
reduction="mean",
smooth_factor=0.1,
num_classes=num_classes)
# define metric
eval_metrics = {'Top_1_Accuracy': train.Top1CategoricalAccuracy(),
'Top_5_Accuracy': train.Top5CategoricalAccuracy()}
if ascend_target:
model = train.Model(network, loss_fn=network_loss, optimizer=network_opt, metrics=eval_metrics, amp_level="O2")
else:
model = train.Model(network, loss_fn=network_loss, optimizer=network_opt, metrics=eval_metrics, amp_level="O0")
# evaluate model
result = model.eval(dataset_val)
print(result)
模型推理
dataset_infer = ImageFolderDataset(os.path.join(data_path, "infer"), shuffle=True)
trans_infer = [
transforms.Decode(),
transforms.Resize([224, 224]),
transforms.Normalize(mean=mean, std=std),
transforms.HWC2CHW()
]
dataset_infer = dataset_infer.map(operations=trans_infer,
input_columns=["image"],
num_parallel_workers=1)
dataset_infer = dataset_infer.batch(1)

import os
import pathlib
import cv2
import numpy as np
from PIL import Image
from enum import Enum
from scipy import io
class Color(Enum):
"""dedine enum color."""
red = (0, 0, 255)
green = (0, 255, 0)
blue = (255, 0, 0)
cyan = (255, 255, 0)
yellow = (0, 255, 255)
magenta = (255, 0, 255)
white = (255, 255, 255)
black = (0, 0, 0)
def check_file_exist(file_name: str):
"""check_file_exist."""
if not os.path.isfile(file_name):
raise FileNotFoundError(f"File `{file_name}` does not exist.")
def color_val(color):
"""color_val."""
if isinstance(color, str):
return Color[color].value
if isinstance(color, Color):
return color.value
if isinstance(color, tuple):
assert len(color) == 3
for channel in color:
assert 0 <= channel <= 255
return color
if isinstance(color, int):
assert 0 <= color <= 255
return color, color, color
if isinstance(color, np.ndarray):
assert color.ndim == 1 and color.size == 3
assert np.all((color >= 0) & (color <= 255))
color = color.astype(np.uint8)
return tuple(color)
raise TypeError(f'Invalid type for color: {type(color)}')
def imread(image, mode=None):
"""imread."""
if isinstance(image, pathlib.Path):
image = str(image)
if isinstance(image, np.ndarray):
pass
elif isinstance(image, str):
check_file_exist(image)
image = Image.open(image)
if mode:
image = np.array(image.convert(mode))
else:
raise TypeError("Image must be a `ndarray`, `str` or Path object.")
return image
def imwrite(image, image_path, auto_mkdir=True):
"""imwrite."""
if auto_mkdir:
dir_name = os.path.abspath(os.path.dirname(image_path))
if dir_name != '':
dir_name = os.path.expanduser(dir_name)
os.makedirs(dir_name, mode=777, exist_ok=True)
image = Image.fromarray(image)
image.save(image_path)
def imshow(img, win_name='', wait_time=0):
"""imshow"""
cv2.imshow(win_name, imread(img))
if wait_time == 0: # prevent from hanging if windows was closed
while True:
ret = cv2.waitKey(1)
closed = cv2.getWindowProperty(win_name, cv2.WND_PROP_VISIBLE) < 1
# if user closed window or if some key pressed
if closed or ret != -1:
break
else:
ret = cv2.waitKey(wait_time)
def show_result(img: str,
result: Dict[int, float],
text_color: str = 'green',
font_scale: float = 0.5,
row_width: int = 20,
show: bool = False,
win_name: str = '',
wait_time: int = 0,
out_file: Optional[str] = None) -> None:
"""Mark the prediction results on the picture."""
img = imread(img, mode="RGB")
img = img.copy()
x, y = 0, row_width
text_color = color_val(text_color)
for k, v in result.items():
if isinstance(v, float):
v = f'{v:.2f}'
label_text = f'{k}: {v}'
cv2.putText(img, label_text, (x, y), cv2.FONT_HERSHEY_COMPLEX,
font_scale, text_color)
y += row_width
if out_file:
show = False
imwrite(img, out_file)
if show:
imshow(img, win_name, wait_time)
def index2label():
"""Dictionary output for image numbers and categories of the ImageNet dataset."""
metafile = os.path.join(data_path, "ILSVRC2012_devkit_t12/data/meta.mat")
meta = io.loadmat(metafile, squeeze_me=True)['synsets']
nums_children = list(zip(*meta))[4]
meta = [meta[idx] for idx, num_children in enumerate(nums_children) if num_children == 0]
_, wnids, classes = list(zip(*meta))[:3]
clssname = [tuple(clss.split(', ')) for clss in classes]
wnid2class = {wnid: clss for wnid, clss in zip(wnids, clssname)}
wind2class_name = sorted(wnid2class.items(), key=lambda x: x[0])
mapping = {}
for index, (_, class_name) in enumerate(wind2class_name):
mapping[index] = class_name[0]
return mapping
# Read data for inference
for i, image in enumerate(dataset_infer.create_dict_iterator(output_numpy=True)):
image = image["image"]
image = ms.Tensor(image)
prob = model.predict(image)
label = np.argmax(prob.asnumpy(), axis=1)
mapping = index2label()
output = {int(label): mapping[int(label)]}
print(output)
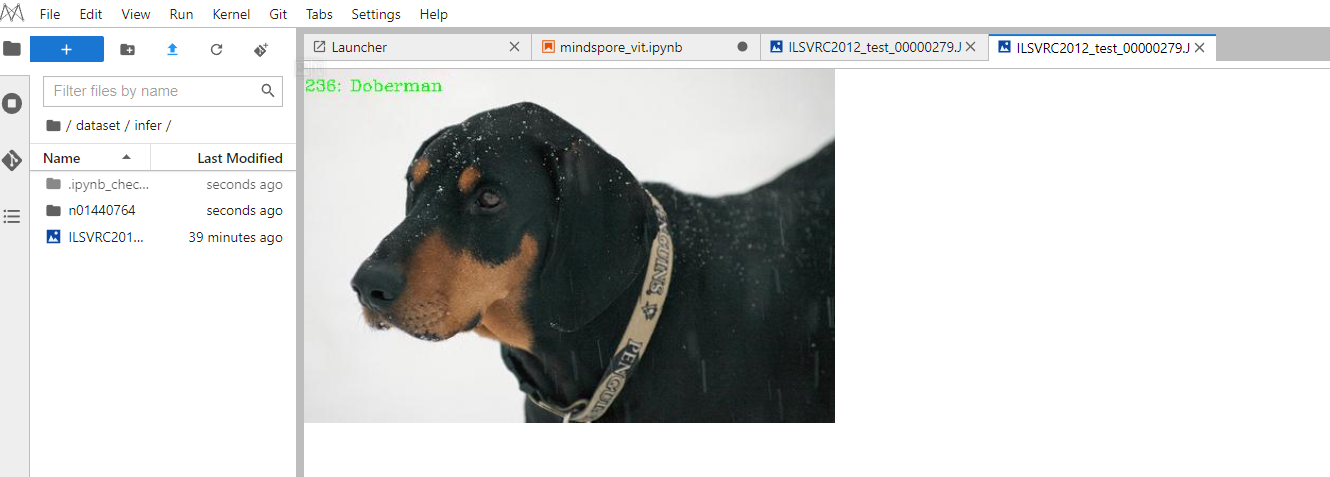
show_result(img="./dataset/infer/n01440764/ILSVRC2012_test_00000279.JPEG",
result=output,
out_file="./dataset/infer/ILSVRC2012_test_00000279.JPEG")
推理过程完成后,在推理文件夹下可以找到图片的推理结果,可以看出预测结果是Doberman,与期望结果相同,验证了模型的准确性。





![[Tools: Camera Conventions] NeRF中的相机矩阵估计](https://img-blog.csdnimg.cn/img_convert/9224b3b55a4cadb57779ed7eae814902.png)