论文地址:https://arxiv.org/pdf/2307.07635v1.pdf
官方地址:https://co-tracker.github.io/
github地址:https://github.com/facebookresearch/co-tracker/tree/main
引言
在计算机视觉领域,光流估计是历史最久远的问题之一,早期的方法尝试通过解决色彩恒定性引起的简单微分方程来处理。然而,随着深度学习技术的不断进步,现代光流问题已经迈入了一个全新的阶段。其中,《CoTracker: It is Better to Track Together》这篇令人瞩目的论文,为我们带来了一种高效且准确的光流估计器。在此之前,该论文精彩总结了光流估计的历史发展背景,涵盖了众多经典和现代光流算法。从最初的色彩恒定性方法,到FlowNet和FlowNet2等引领潮流的端到端卷积网络,再到更近期的Transformer和深度学习方法,该文对光流估计领域的技术进展进行了全面梳理。这一综述为读者们提供了深入了解光流估计研究历程的机会,同时也为CoTracker的出现奠定了坚实的理论基础。本博客将着重介绍CoTracker这篇杰出论文,展示它是如何在光流估计领域取得突破性进展,为长期跟踪问题提供了全新的解决方案。
光流估计发展
按时间顺序和技术复杂度列出光流估计的一些技术:
- 色彩恒定性方法 [16, 24, 4, 5]:最初的光流估计方法,通过解决由色彩恒定性引起的简单微分方程来处理。
- FlowNet [12]:第一个端到端的用于光流估计的卷积网络,由Dosovitskiy等人引入。
- FlowNet2 [18]:在FlowNet的基础上,通过堆叠架构和图像配准进一步改进的光流估计方法。
- DCFlow [46]:提出了构建4D成本体积的方法,该成本体积捕捉了源图像和目标图像特征之间的关系。
- PWC-Net [39]:使用了DCFlow中的成本体积,并引入金字塔处理和图像配准以降低计算成本。
- RAFT [41]:保留了高分辨率的光流并增量更新光流场,启发了后续的研究工作。
- Flowformer [17]:从RAFT汲取灵感,提出了基于Transformer的方法,对4D成本体积进行了分词处理。
- GMFlow [48]:将更新网络替换为具有自注意力的softmax以进行优化。
- Perceiver IO [19]:提出了一个统一的Transformer框架,可应用于多个任务,包括光流估计。
- Kalman滤波方法 [9, 13]:传统的多帧光流方法,用于确保时间一致性。
- VideoFlow [33]:将光流扩展到三个和五个连续帧,通过在光流优化期间集成前向和后向运动特征。
- TAP-Vid [10]:提出了在视频中跟踪任何物理点的问题,并为其提供了基准测试和简单的基线方法。
- Particle Video Revisited [15]:通过引入用于点遮挡跟踪的模型,重新审视了经典的Particle Video问题。
- OmniMotion [44]:在测试时优化每个视频的体积表示,在规范空间中优化估计的对应关系。
- MFT [27]:在远距离帧之间进行光流估计,并选择最可靠的光流链。
- TAPIR [11]:一种前馈式点跟踪器,其匹配阶段受到TAP-Vid的启发,细化阶段受到PIPs的启发。
CoTracker跟踪器
目标和问题形式化
CoTracker的目标是在视频的持续时间内跟踪2D点。视频V由T个RGB帧组成,记作 V = ( I 1 , I 2 , . . . , I T ) V = (I_1, I_2, ..., I_T) V=(I1,I2,...,IT)。跟踪任务涉及为N个点生成轨迹 P t i = ( x t i , y t i ) ∈ R 2 P^i_t = (x^i_t, y^i_t) ∈ R^2 Pti=(xti,yti)∈R2,其中 t = t i , . . . , T , i = 1 , . . . , N 。 t i ∈ 1 , . . . , T t = t^i, ..., T,i = 1, ..., N。t^i ∈ {1, ..., T} t=ti,...,T,i=1,...,N。ti∈1,...,T表示轨迹开始的时间。另外,可见性标志 v t i ∈ { 0 , 1 } v^i_t ∈ \lbrace0, 1 \rbrace vti∈{0,1}表示在给定帧中点是否可见或被遮挡。要求轨迹的起始点在初始时刻是可见的(即 v t i i = 1 v^i_{t^i} = 1 vtii=1)。注意,轨迹可以在视频的任何时间 1 ≤ t i ≤ T 1 ≤ t^i ≤ T 1≤ti≤T开始。
CoTracker跟踪器的输入和输出
CoTracker算法以视频V和N个轨迹的起始位置和时间 ( P t i i , t i ) i N = 1 (P^i_{t^i}, t^i)^N_i=1 (Ptii,ti)iN=1作为输入,并输出所有有效时间 ( t ≥ t i ) (t ≥ t_i) (t≥ti)的轨迹估计 P t i = ( x t i , y t i ) P^i_t = (x^i_t, y^i_t) Pti=(xti,yti)。跟踪器预测可见性标志的估计值 v ^ t i v̂^i_t v^ti。在这些值中,只有初始值 P ^ t i i = P t i i P̂^i_{t^i} = P^i_{t^i} P^tii=Ptii和 v ^ t i i = v t i i = 1 \hat v^i_{t^i} = v^i_{t^i}=1 v^tii=vtii=1是已知的,其他值需要进行预测。
CoTracker框架
CoTracker使用一个名为CoTracker的Transformer网络来预测轨迹的估计值。其大致结构如下:
Ψ : G ↦ O \Psi: G ↦ O Ψ:G↦O
在上面的式子中,轨迹使用输入tokens编码表示:
G
t
i
G^i_t
Gti,其中
i
=
1
,
.
.
.
,
N
i = 1, ..., N
i=1,...,N代表跟踪点,
t
=
1
,
.
.
.
,
T
t = 1, ..., T
t=1,...,T代表时间。更新后的轨迹由相应的输出tokens表示:
O
t
i
O^i_t
Oti。
具体地,CoTracker包含三个特征:
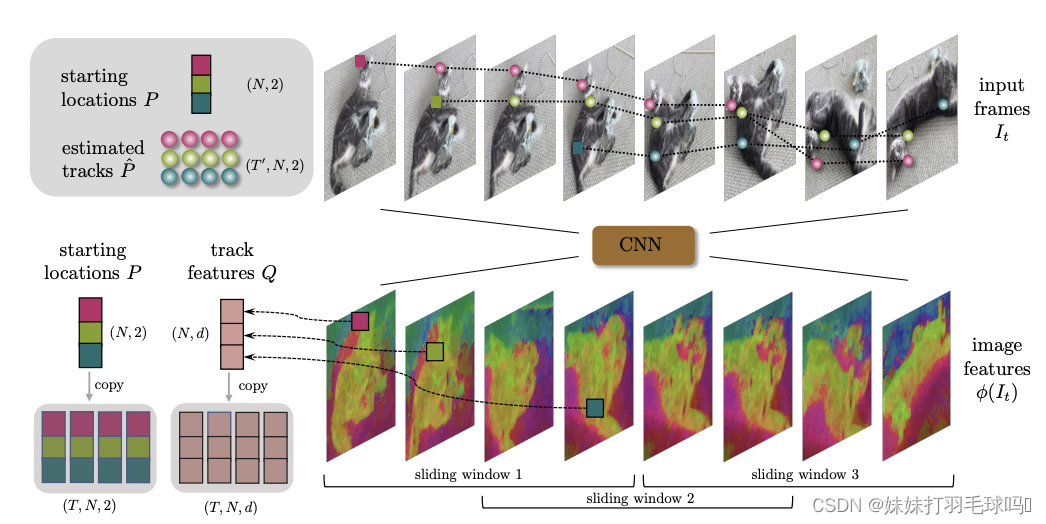
1. 图像特征
从每个视频帧 I t I_t It中提取d维外观特征 ϕ ( I t ) ∈ R d × H k × W k \phi(I_t) \in R^{d \times \frac{H}{k} \times \frac{W}{k}} ϕ(It)∈Rd×kH×kW,其中k = 8是一个下采样因子,用于提高效率。论文中考虑了多个缩放版本 ϕ ( I t ; s ) ∈ R d × H s k × W s k \phi(I_t;s) \in R^{d \times \frac{H}{sk} \times \frac{W}{sk}} ϕ(It;s)∈Rd×skH×skW,其中 s = 1 , . . . , S s = 1, ..., S s=1,...,S。这些缩小的特征是通过对 s × s s \times s s×s邻域内的基本特征应用平均池化得到的,其中 S = 4 S = 4 S=4。
在项目中,选择提取外观特征的模型是用于图像分类任务的预训练模型 ResNet-18。ResNet(Residual Network)是一种深度卷积神经网络架构,通过使用残差块(Residual Blocks)解决了深度网络中梯度消失和梯度爆炸等问题,允许构建非常深的网络。
论文中提到的 ϕ ( I t ) ∈ R d × H k × W k \phi(I_t) \in R^{d \times \frac{H}{k} \times \frac{W}{k}} ϕ(It)∈Rd×kH×kW以及缩放版本 ϕ ( I t ; s ) ∈ R d × H s k × W s k \phi(I_t;s) \in R^{d \times \frac{H}{sk} \times \frac{W}{sk}} ϕ(It;s)∈Rd×skH×skW是通过CNN对图像 I t I_t It进行处理得到的。
在代码中,外观特征的提取可以在get_appearance_features函数中找到,其代码如下:
def get_appearance_features(frames, model):
"""
Extracts appearance features for all frames using a given model.
Args:
frames: Tensor of shape (T, 3, H, W) representing T frames of the video.
model: Pretrained CNN model used for feature extraction.
Returns:
Tensor of shape (T, d, H//k, W//k) representing the appearance features for each frame.
"""
T, _, H, W = frames.size()
frames = frames.reshape(T * 3, H, W)
with torch.no_grad():
features = model(frames.unsqueeze(1)).squeeze()
return features.reshape(T, -1, H // k, W // k)
在这个函数中,frames是输入视频的帧序列,形状为(T, 3, H, W),其中T表示帧数,3表示RGB通道,H和W分别表示帧的高度和宽度。model是一个预训练的CNN模型,用于特征提取。这里使用的CNN模型可能是在数据集上进行了预训练的,例如使用ImageNet数据集。
首先,对输入的帧序列进行一些形状变换,将其转换为形状为(T3, H, W)的张量。然后,将这个张量输入到CNN模型中,并通过model(frames.unsqueeze(1))得到输出特征张量。最后,通过squeeze()方法去除不需要的维度,得到形状为(Td, H//k, W//k)的特征张量。其中d表示特征的维度。
最后,通过reshape操作将特征张量重新恢复为形状为(T, d, H//k, W//k)的外观特征,它将被用于后续的跟踪过程。注意,这里提到的k和S的值分别对应于论文中提到的下采样因子和缩放版本的数量。
2. 跟踪特征
轨迹的特征由向量 Q t i ∈ R d Q^i_t \in R^d Qti∈Rd表示,这些特征是与时间相关的,以适应轨迹的变化。最初通过采样图像特征进行初始化,然后由神经网络进行更新。
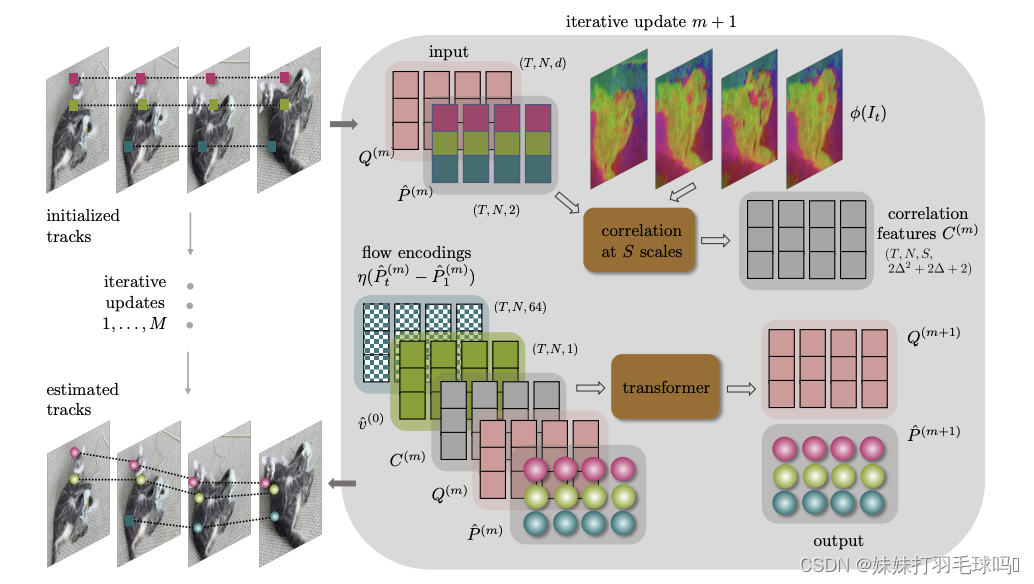
上图为CoTracker 架构。展示了一个滑动窗口和
M
M
M次迭代更新的可视化。在一次迭代中,我们更新点轨迹
P
^
(
m
)
\hat P(m)
P^(m)和轨迹特征
Q
(
m
)
Q(m)
Q(m)。对于所有滑动窗口,
Q
(
0
)
Q(0)
Q(0)初始化为
Q
Q
Q,
P
^
(
0
)
\hat P(0)
P^(0)初始化为未见过的帧的起始轨迹,并对上一滑动窗口中处理过的帧进行预测。可见性
v
^
\hat v
v^在最后一次更新
M
M
M后计算。
特征 Q t i Q^i_t Qti的计算过程如下:
- 初始化:首先,对于每个轨迹 i i i和时间 t t t,我们使用初始图像特征 ϕ ( I t i ; s ) \phi(I_{t^i}; s) ϕ(Iti;s)来初始化轨迹特征 Q t i Q^i_t Qti,其中 t i t^i ti是轨迹 i i i的起始时间。注意, s s s是缩放版本的索引,用于提取不同尺度的特征。
- 神经网络更新:接下来,我们使用神经网络来更新轨迹特征 Q t i Q^i_t Qti。在代码中,这个神经网络是CoTracker模型中的一部分,使用Transformer网络来对轨迹特征进行迭代更新。
具体来说,轨迹特征 Q t i Q^i_t Qti是通过在每个时间步上应用神经网络层来更新的。这个神经网络层可能包含一些线性变换、非线性激活函数和归一化操作,具体的网络结构和参数是根据CoTracker模型的设计来确定的。
3. 相关特征
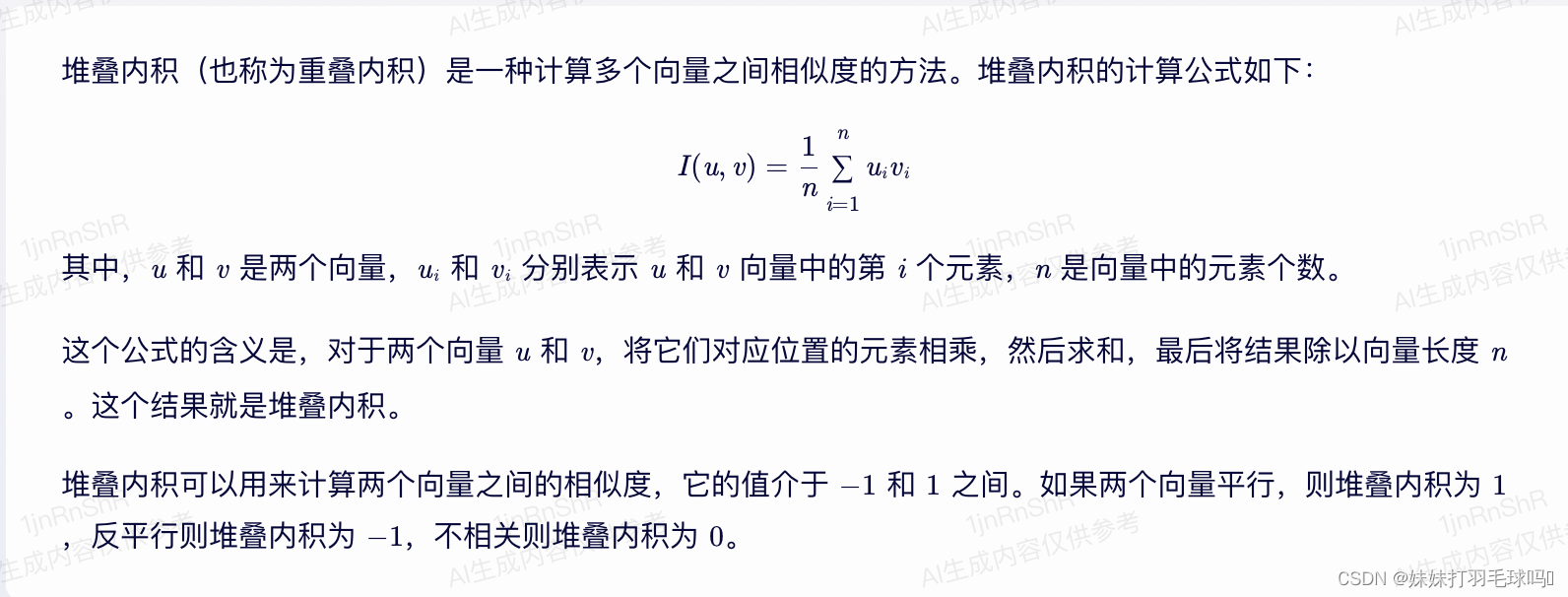
为了便于将轨迹与图像匹配,引入相关特征 C t i ∈ R S C^i_t \in R^S Cti∈RS。这些特征通过比较轨迹特征Q和围绕当前轨迹位置 P ^ i t P̂^t_i P^it的图像特征 ϕ ( I t ; s ) \phi(I_t; s) ϕ(It;s)获得。具体地,向量 C ^ t i \hat C^i_t C^ti通过堆叠内积得到如下计算所示:
< Q t i , ϕ ( I t ; s ) [ P ^ t i / k s + δ ] > , s = 1 , . . . , S , δ ∈ Z 2 , ∣ ∣ δ ∣ ∣ 1 ≤ Δ , Δ ∈ N <Q^i_t,\phi(I_t;s)[\hat P^i_t/ks+\delta]>,s=1,...,S,\delta \in Z^2,||\delta||_1 \leq \Delta,\Delta \in N <Qti,ϕ(It;s)[P^ti/ks+δ]>,s=1,...,S,δ∈Z2,∣∣δ∣∣1≤Δ,Δ∈N
其中偏移量 δ \delta δ定义了点 P ^ i t \hat P^t_i P^it 的邻域。图像特征 ϕ ( I t ; s ) \phi(I_t; s) ϕ(It;s)是通过双线性插值和零填充在非整数位置采样得到的。 C ^ t i \hat C^i_t C^ti的维度为 2 ( Δ 2 + Δ ) + 1 ) S = 164 2(\Delta^2 + \Delta) + 1)S = 164 2(Δ2+Δ)+1)S=164,对于选择的 S S S为 S = Δ = 4 S= \Delta = 4 S=Δ=4。
具体的计算过程如下:
- 对于轨迹 i i i和时间 t t t,获取图像特征 ϕ ( I t ; s ) \phi(I_t; s) ϕ(It;s),其中 s = 1 , . . . , S s=1, ..., S s=1,...,S是缩放版本的索引。这些缩小的特征是通过对 s × s s \times s s×s邻域内的基本特征应用平均池化得到的,其中 S = 4 S=4 S=4。
- 确定偏移量 δ \delta δ:偏移量 δ ∈ Z 2 \delta \in \mathbb{Z}^2 δ∈Z2定义了点 P ^ i t \hat P^t_i P^it的邻域。具体来说,对于每个 s s s,我们在 P ^ i t / k s \hat P^t_i/ks P^it/ks周围的邻域内选择偏移量 δ \delta δ,并且满足 ∣ ∣ δ ∣ ∣ 1 ≤ Δ ||\delta||_1 \leq \Delta ∣∣δ∣∣1≤Δ,其中 Δ ∈ N \Delta \in \mathbb{N} Δ∈N是选择的参数。
- 通过堆叠内积计算 C ^ t i \hat C^i_t C^ti:对于每个 s s s和 δ \delta δ的组合,我们计算 Q t i Q^i_t Qti与 ϕ ( I t ; s ) [ P ^ i t / k s + δ ] \phi(I_t; s)[\hat P^t_i/ks+\delta] ϕ(It;s)[P^it/ks+δ]之间的内积。注意, ϕ ( I t ; s ) [ P ^ i t / k s + δ ] \phi(I_t; s)[\hat P^t_i/ks+\delta] ϕ(It;s)[P^it/ks+δ]表示在图像特征 ϕ ( I t ; s ) \phi(I_t; s) ϕ(It;s)中通过双线性插值和零填充在非整数位置采样得到的值。
- 最终的 C ^ t i \hat C^i_t C^ti:将所有 s s s和 δ \delta δ的组合得到的内积结果堆叠在一起,得到向量 C ^ t i ∈ R S \hat C^i_t \in \mathbb{R}^S C^ti∈RS。根据论文中的描述, C ^ t i \hat C^i_t C^ti的维度为 2 ( Δ 2 + Δ ) + 1 ) S = 164 2(\Delta^2 + \Delta) + 1)S = 164 2(Δ2+Δ)+1)S=164(当 S = Δ = 4 S= \Delta = 4 S=Δ=4时)。
这样,我们就得到了相关特征 C ^ t i \hat C^i_t C^ti,它度量了轨迹特征 Q t i Q^i_t Qti与图像特征 ϕ ( I t ; s ) \phi(I_t; s) ϕ(It;s)之间的相关性。这种相关性的度量对于将轨迹与图像进行匹配和跟踪是非常重要的,因为它帮助模型在视频中找到与轨迹相关的图像区域,并用于更新轨迹的估计。
代码示列:
import torch
import torch.nn.functional as F
def compute_correlation_features(Q, image_features, grid_size, delta_range):
"""
Compute the correlation features for the given track features Q and image features.
Args:
Q (torch.Tensor): Track features tensor of shape (N, d), where N is the number of tracks and d is the feature dimension.
image_features (torch.Tensor): Image features tensor of shape (S, d, H, W), where S is the number of scales, d is the feature dimension,
H is the height, and W is the width.
grid_size (int): Size of the grid used for correlation features calculation.
delta_range (int): Maximum range of offsets (delta) used for correlation features calculation.
Returns:
torch.Tensor: Correlation features tensor of shape (N, S, grid_size, grid_size).
"""
N, d = Q.shape
S, _, H, W = image_features.shape
# Reshape Q to (N, 1, 1, d) and image_features to (1, S, d, H, W) to enable element-wise multiplication
Q_reshaped = Q.view(N, 1, 1, d)
image_features_reshaped = image_features.view(1, S, d, H, W)
# Initialize correlation features tensor
correlation_features = torch.zeros(N, S, grid_size, grid_size, device=Q.device)
# Loop over grid positions and delta offsets to compute correlation features
for dy in range(-delta_range, delta_range+1):
for dx in range(-delta_range, delta_range+1):
delta = torch.tensor([dy, dx], dtype=torch.float32, device=Q.device)
delta_scaled = delta / (grid_size * 8) # Scale the delta to match the grid size
# Compute the indices for the correlation grid
grid_y, grid_x = torch.meshgrid(torch.arange(grid_size, device=Q.device),
torch.arange(grid_size, device=Q.device))
grid_indices = torch.stack((grid_y, grid_x), dim=-1).view(1, 1, grid_size, grid_size, 2)
grid_indices = grid_indices.repeat(N, S, 1, 1, 1).float()
# Compute the image features at the grid positions using bilinear interpolation
grid_positions = (Q_reshaped + delta_scaled).view(N, 1, 1, 1, 2) # Add delta to Q and reshape for broadcasting
image_features_grid = F.grid_sample(image_features_reshaped, grid_positions,
mode='bilinear', padding_mode='zeros')
# Compute the correlation features by element-wise multiplication and summing
correlation_feature = torch.sum(Q_reshaped * image_features_grid, dim=-1) # Element-wise multiplication and sum along the feature dimension
correlation_features[:, :, (grid_size-1)//2+dy, (grid_size-1)//2+dx] = correlation_feature.squeeze(-1)
return correlation_features
# Example usage
N = 10 # Number of tracks
d = 256 # Feature dimension
S = 4 # Number of scales
H, W = 128, 128 # Height and width of the image features
grid_size = 7 # Size of the grid for correlation features
delta_range = 4 # Maximum range of offsets (delta)
# Create random track features and image features (for demonstration purposes)
Q = torch.rand(N, d)
image_features = torch.rand(S, d, H, W)
# Compute correlation features
correlation_features = compute_correlation_features(Q, image_features, grid_size, delta_range)
print(correlation_features.shape) # Output shape: (N, S, grid_size, grid_size)
补充:堆叠内积计算如下
滑动窗口推断
Transformer 设计的一个优势是它可以轻松支持滑动窗口应用,以处理非常长的视频。特别考虑一个长度为 T ′ > T T' > T T′>T的视频 V V V,其长度超过了架构支持的最大窗口长度 T T T。
为了在整个视频 V V V中跟踪点,将视频分成 J = ⌈ 2 T ′ / T − 1 ⌉ J = ⌈2T' / T − 1⌉ J=⌈2T′/T−1⌉个长度为 T T T的窗口,其中窗口之间有 T / 2 T / 2 T/2 帧的重叠。
为了处理视频,将 Transformer迭代 M J MJ MJ次:第一个窗口的输出被用作第二个窗口的输入,依此类推。用 ( m , j ) (m, j) (m,j) 上标表示迭代于第 j j j个窗口的第 m m m次 Transformer 更新。
因此,得到了一个 M × J M \times J M×J 的量 ( P ^ ( m , j ) , v ^ ( m , j ) , Q ( m , j ) ) (P̂^{(m,j)}, v̂^{(m,j)}, Q^{(m,j)}) (P^(m,j),v^(m,j),Q(m,j)),横跨 Transformer 迭代和窗口。从 m = 0 m = 0 m=0和 j = 1 j = 1 j=1 开始,我们使用式 (1) 初始化这些量。然后,将 Transformer迭代M次,以获得状态 ( P ^ ( M , 1 ) , v ^ ( M , 1 ) , Q ( M , 1 ) ) (P̂^{(M,1)}, v̂^{(M,1)}, Q^{(M,1)}) (P^(M,1),v^(M,1),Q(M,1))。从这个状态开始,为第二个窗口初始化 ( P ^ ( 0 , 2 ) , v ^ ( 0 , 2 ) , Q ( 0 , 2 ) ) (P̂^{(0,2)}, v̂^{(0,2)}, Q^{(0,2)}) (P^(0,2),v^(0,2),Q(0,2)),方式类似于式 (1)。具体来说, P ^ ( 0 , 2 ) P̂^{(0,2)} P^(0,2) 的前 T / 2 T / 2 T/2 个分量是 P ^ ( M , 1 ) P̂^{(M,1)} P^(M,1) 的后 T / 2 T / 2 T/2 个分量的副本; P ^ ( 0 , 2 ) P̂^{(0,2)} P^(0,2)的后 T / 2 T / 2 T/2个分量是 P ^ ( M , 1 ) P̂^{(M,1)} P^(M,1) 中 t = T / 2 − 1 t = T / 2-1 t=T/2−1 时刻的副本。 v ^ ( 0 , 2 ) v̂^{(0,2)} v^(0,2) 的更新规则与此类似,而 Q ( 0 , j ) Q^{(0,j)} Q(0,j)总是使用初始轨迹特征 Q 进行初始化。在初始化 ( P ^ ( 0 , 2 ) , v ^ ( 0 , 2 ) , Q ( 0 , 2 ) ) (P̂^{(0,2)}, v̂^{(0,2)}, Q^{(0,2)}) (P^(0,2),v^(0,2),Q(0,2)) 后,将 Transformer 再次迭代M次于第二个窗口,然后继续为下一个窗口重复该过程。最后,通过使用初始化 (1) 来扩展令牌格,添加任何新的轨迹。
展开学习
论文发现以展开的方式学习窗口式 Transformer 对于适当处理部分重叠的窗口很重要。主要的损失是轨迹回归损失,通过迭代 Transformer 应用和窗口进行求和:
L 1 ( P ^ , P ) = ∑ j = 1 J ∑ m = 1 M γ M − m ∣ ∣ P ^ m , j − P ( j ) ∣ ∣ , ( 2 ) L_1(\hat P, P) = \sum_{j=1}^J\sum_{m=1}^M \gamma^{M-m}||\hat P^{m,j}-P^{(j)}||,\space \space (2) L1(P^,P)=j=1∑Jm=1∑MγM−m∣∣P^m,j−P(j)∣∣, (2)
其中 γ = 0.8 \gamma = 0.8 γ=0.8是用于衰减早期 Transformer 更新的因子。这里, P ( j ) P^{(j)} P(j)包含了限制在窗口 j j j中的真实轨迹(从窗口中间开始的轨迹向后填充)。第二个损失是可见性标志的交叉熵损失: L 2 ( v ^ , v ) = ∑ j = 1 J C E ( v ^ ( M , j ) , v ( j ) ) L_2(\hat v, v) = \sum_{j=1}^J CE(\hat v^{(M,j)},v^{(j)}) L2(v^,v)=∑j=1JCE(v^(M,j),v(j))。
在训练过程中,由于计算成本的原因,损失只对少量的窗口进行求和。但在测试时,可以任意展开窗口式 Transformer迭代,从而原则上处理任何视频长度。
展开推断允许跟踪后出现的点,只在点首次出现的滑动窗口开始跟踪点。同时,确保这样的点在训练数据中存在,通过在序列的中间帧中采样可见的点。
Transformer
Transformer 由交错的时间注意力块和组注意力块组成,两者都应用到输入和输出上的两个线性层。通过在时间和点轨迹之间分解注意力,使得模型的计算变得可行:复杂性从 O ( N 2 T 2 ) O(N^2T^2) O(N2T2) 减少到 O ( N 2 + T 2 ) O(N^2 + T^2) O(N2+T2)。除了输入估计轨迹的位置编码 η \eta η外,此外还添加了标准的正弦位置编码:时间维度为 1 维,空间维度为 2 维。