1. 目的
本文描述了产品开发不同阶段(研发、验证和产品化)车辆集成的控制要求。
2. 控制接口要求
2.1 接口类型
控制模块与车辆之间的接口应基于CAN协议或Flexray协议。
2.2 通讯频率
控制模块与车辆之间的通讯频率应高于36Hz。通信频率优先选择为 50 Hz。
2.3 延迟
所有控制信号的延迟应低于20ms。
2.4 控制命令和信号
2.4.1 概述
车辆运动控制应通过对车辆的直接命令、电机扭矩、制动扭矩和方向盘角度(或齿条位置)。
2.4.2 纵向控制
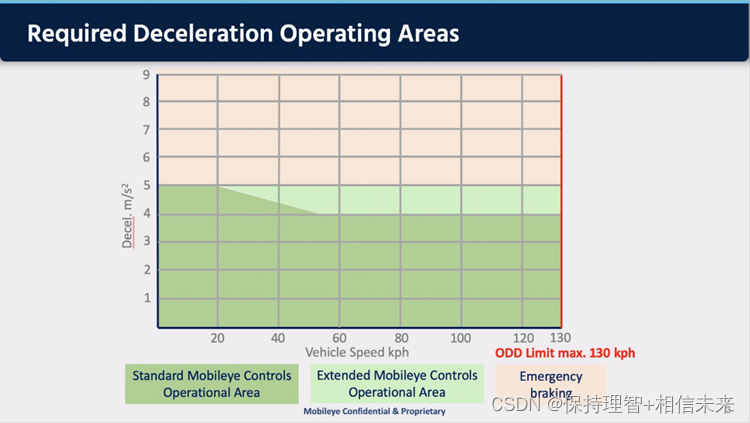
纵向控制分为两大类:舒适驾驶和紧急操作。
对于舒适驾驶,纵向加速度值在 [-4.8 – +5] m/s2 范围内。
对于紧急制动,预计减速度 < -9 m/s2(相当于 AEB 制动)。
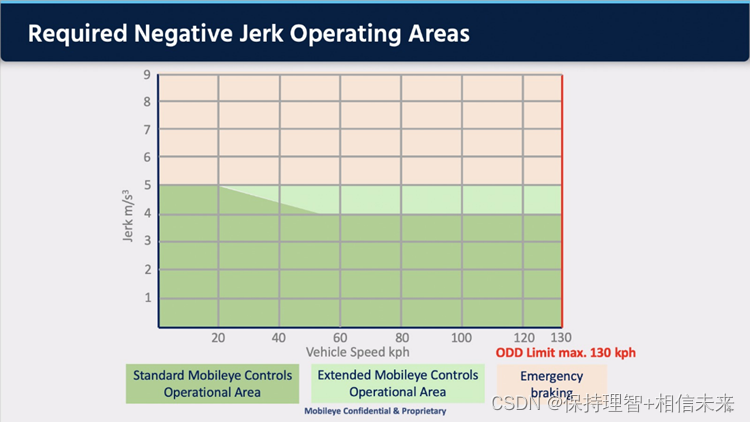
2.4.2.1 加加速度
1. 通常,在舒适驾驶中,加加速度值应在 [-4 – +3] (m/s3) 范围内。
2.“Leave brake”——大的正向加加速度意味着在任何速度下立即释放制动压力,此时Jerk>5 (m/s3)。
3. 紧急制动期间,加加速度应至少小于 -10 (m/s3)。
2.4.3 转向和横向加速度值
应在所有速度范围内(包括静止时)控制转向。
横向加速度 <= 6 m/sec 2 。
在整个车速范围内道路转向速率应达到20°/s。
2.4.4 车辆信号与控制
2.4.4.1 纵向控制-命令
纵向命令将使用车轮扭矩和电机扭矩值(正和负)来实现。
2.4.4.2 制动-命令
命令直接来自踏板制动。
2.4.4.3 转向-命令
转向命令将使用转向角值或齿条位置来实现。
2.4.4.4 角速度信号-报告
车辆应提供角速度测量。
假定车辆提供的偏航角速度在 50 km/h 的速度下偏移误差低于 1°/s。
假定车辆提供的偏航角速度在 130km/h 时的偏移误差低于 0.6°/s。
2.4.4.5 车辆速度信号-报告
车辆应提供车速信息。
车速应根据每个车轮(右前、左前、右后、左后)给出。
在整个车速范围内,车速精度应优于1%。
车辆速度信号的分辨率应为 5 cm/s。
速度死区应小于0.1 m/sec。
2.4.4.6 车轮扭矩和RPM-报告
车辆应报告车轮扭矩和转速。
2.4.4.7 加速-报告
车辆应提供3轴加速度计(ax,ay,az)。
车辆应提供地面加速度测量。
2.4.4.8 转向角信号-报告
车辆应提供转向角信息。
假设车辆提供的方向盘角度对于 0°/s 的任何旋转速度具有低于 0.1° 的偏移误差。
2.4.4.9 转向速率–报告
车辆应提供转向速率读数。
2.4.4.10 档位-报告
车辆应提供档位状态和特殊驾驶模式(节能/运动等)。
2.4.5 其他车辆功能
2.4.5.1 概述
除了控制信号外,车辆还应支持车辆操作所需的附加信号。
车辆应提供所有内部模式。
2.4.5.2 档位选择
车辆应能够支持从车辆控制界面选择档位。
档位选择应至少支持以下档位:驻车档、前进档、倒车档、空档。
车辆应向 ADS 报告档位状态。
2.4.5.3 转向灯–命令和报告
ADS 应能够激活转向灯。至少应支持以下状态:左转、右转、警告。
2.4.5.4 雨刮器–命令和报告
ADS 应能够根据适用的雨刮器模式操作前雨刮器。
2.4.5.5 喇叭–命令
ADS 应能够操作车辆喇叭。
2.4.6 驾驶员人机界面
车辆应报告功能启用/禁用的按钮状态。
车辆应报告驾驶员功能相关参数。
车辆应报告驾驶员接管和接触百分比:
* 方向盘 [驾驶员扭矩]
* 制动踏板 [% 踏板]
* 油门踏板 [% 踏板]
* 开/关按钮。
3. 车辆开环运动学性能
| 项目 | 要求 | 单位 | |
| 纵向控制 | 舒适纵向加速度 | -5 ~ 2 | m/s2 |
| 舒适纵向加加速度 | -4 ~ 3 | m/s3 | |
| AEB减速度 | <= -9 | m/s2 | |
| AEB jerk | <= -10 | m/s3 | |
| 超调加减速度 | 20 | % | |
| 稳态误差 | 1 | % | |
| 响应时间 | <100 | ms | |
| 执行时间 | <300 | ms | |
| 超调时间 | <100 | ms | |
| 横向控制 | 超调Δθ1 | 1 | % |
| 稳态误差Δθ2 | 0.1 | deg | |
| 响应时间ΔT1 | <= 100 | ms | |
| 执行时间ΔT2 | <500 | ms | |
| 超调时间ΔT3 | <50 | ms | |
| 带宽 | 1.5 | Hz |
3.1 对ADS命令的运动学响应
3.1.1 转向角度
转向角误差应小于0.5°。
转向角延迟应小于 150 毫秒。