文章目录
- 一、直流有刷电机
- 二、减速比
- 三、霍尔编码器
- 3.1 霍尔编码器
- 3.2 霍尔编码器测速原理
- 四、测速程序设计
- 4.1 跳变沿检测
- 4.2 计算转速
一、直流有刷电机
宏观上说直流有刷电机由固定部分(定子)和旋转部分(转子)组成。在定子上装有两个励磁的磁极N和S。在其转子部分有电枢铁芯。电枢铁芯上有绕组线圈,线圈的首尾接有两个圆弧形铜片,称为换向片。两个换向片之间互相绝缘。换向片固定在转轴上,换向片与转轴之间也相互绝缘。换向器上固定着一对电刷,电刷与换向器互相接触。绕组线圈通过换向片和电刷与电源连接。下面是直流有刷电机的结构图。

电机是怎么转起来的呢?
这时候就要搬出我们高中所学的物理知识了,因为电机能转起来,离不开一个力——安培力。
首先复习一下安培力,主要是知道什么是安培力以及如何判断安培力的方向。通电导线在磁场中受到的作用力叫做安培力。判断安培力的方向我们用到左右定则,什么是左手定则?伸开左手,使拇指与其他四指垂直且在一个平面内,让磁感线从手心流入,四指指向电流方向,大拇指指向的就是安培力方向(即导体受力方向)。

有的资料上可能说是洛伦兹力,磁场对运动电荷的作用力称为洛伦兹力,安培力是洛伦兹力的宏观表现。
了解了上面的知识,我们开始正式探讨电机是怎么转起来的。
看上面的电机结构图,如果外部电源上正下负接到电刷两边,那么绕组线圈中的电流方向为顺时针,我们来对绕组线圈做一个受力分析。
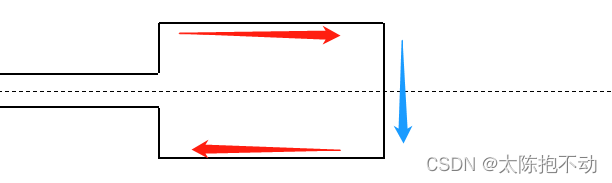
电流方向垂直于磁场方向的部分是不受安培力作用的,也就是上图的蓝色部分。上图的红色部分中我们用左手定则分析一下受力。根据左手定则,上半部分受到垂直屏幕向内的安培力。下半部分受到垂直屏幕向外的安培力。上下两部分受力相反,这时电机就转起来了。同理,如果改变外部电源的接入方向,改成上负下正,上下两部分受力依旧相反,电机依旧可以转动,只不过转动方向相反。
至此,我们了解了直流有刷电机的转动原理以及如何控制正反转。
二、减速比
首先回答一个问题,为什么要有减速电机?
用简单几个字总结一下,为什么会有减速电机?目的是降低转速,增加扭矩。至于到底是怎么降低转速,增加扭矩,我们继续往后看。
什么是减速比?
用到减速电机我们难免会碰到一个概念——减速比。那么什么叫减速比?首先我们先看一下减速电机内部的结构。
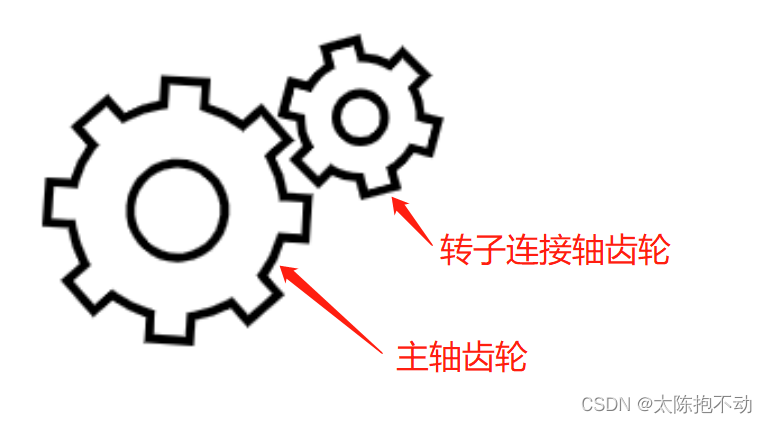
减速电机内部有两个齿轮,一个是转自连接轴上的齿轮,一个是输出主轴上的齿轮。转子转动N圈,主轴转动一圈,这就实现了降低转速。比如我们常见的1:30减速比的减速电机,就是转子转动30圈,主轴转动一圈。如此一来,就实现了降低转速,增加扭矩的目的。减速比就是小齿轮数比大齿轮数的比值。
扭矩实际可以理解为电机转动的力量。如果我们不使用减速电机,拿一个小马达,我们会发现它转的很快,但是很容易用手捏住制动,力量很小。但是如果是减速电机,我们发现转速比较慢,但是我们需要用比制动小马达更大的力来制动。减速比越大,电机转动的力越大。
举一个更加常见的例子,比如我们的山地车。我们上坡时可以调节变速器,让我们用很轻松的力就能上坡,实际就是上面的原理,我们蹬好多圈,车轮才能转一圈,但是我们用的力小了,如果把我们和变速器看作一个电机,实际也就是扭矩大了。
三、霍尔编码器
3.1 霍尔编码器
什么是编码器?
编码器是把角位移或直线位移转换成电信号的一种装置。
编码器按照工作原理,可以分为增量式编码器和绝对式编码器,绝对式编码器的每一个位置对应一个确定的数字码(二进制数)。增量式编码器就是每转过单位的角度就发出一个脉冲信号。
从编码器检测原理上来分,还可以分为光学式、磁式、感应式、电容式。我们常见的是光电编码器(光学式)和我们要介绍的主角霍尔编码器(磁式)。一般来说光电编码器是霍尔编码器精度的几十倍。
编码器的作用。
了解了什么是编码器,那么我们用编码器有什么实际作用呢?通常我们会使用编码器来检测电机的转速和旋转方向。那我们常用的控制算法PID算法来说,PID算法是为了实现闭环控制,要想实现闭环控制,就需要有一个反馈。我们的编码器测得的转速就可以作为反馈,搭配PID算法,实现转速的闭环控制。
霍尔编码器的工作原理。
其实从上面的介绍就能大概了解到编码器的工作原理。我们这次主要介绍对象是霍尔编码器。霍尔编码器由码盘和霍尔元件组成。霍尔码盘与电机主轴同轴,码盘上等分的分布有多个磁极,电机转动时,霍尔元件会输出若干个脉冲信号,我们正是利用这些脉冲信号实现电机的测速和电机转向的判断。
霍尔编码器的线数。
什么是霍尔编码器的线数?转动一圈我们会产生几个脉冲,取决于编码器的线数。比如我们的霍尔编码器线数为13。那么霍尔编码器的码盘旋转一圈,会产生13个脉冲。
3.2 霍尔编码器测速原理
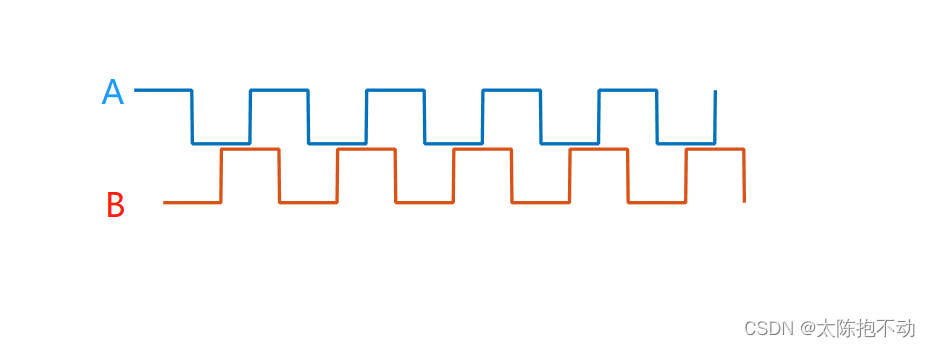
我们正是通过检测霍尔编码器输出的脉冲信号来测速。通常会有三相输出,A、B和Z。A和B的输出是正交的。Z是用来标记旋转一周的起始位置,我们通常不使用。
如何判断电机转向?
我们通过A相出现脉冲时检测B相电平来判断电机旋转方向。
- A检测到上升沿脉冲时,B为低电平,正转;
- A检测到上升沿脉冲时,B为高电平,反转;
如何判断电机转速?
我们通过检测单位时间内产生的脉冲数来确定电机转速。为什么可以这么做?因为电机转动一圈产生的脉冲数是确定的。比如我们有一个减速比为1:30的减速电机,霍尔编码器的线数为13。那么霍尔码盘旋转一圈,产生13个脉冲,霍尔码盘旋转30圈,电机主轴旋转一圈。综上所述,电机主轴旋转一圈会产生13 * 30 = 390个脉冲。注意,这里是只检测A相的上升沿脉冲,电机旋转一圈有390个脉冲。
有的小伙伴可能会疑问,是转一圈A和B一共产生390个脉冲,还是A和B都产生390个脉冲?答案是后者。
接下来我们只需要检测单位时间内A相或者B相输出的脉冲数,就可以计算电机转速了。
四倍频
什么是四倍频?由上面的介绍可知,霍尔编码器输出有A相和B相两条线。我们如果只用A相,检测高电平脉冲数,那么就是上面介绍的那种。如果我们A相和B相都检测,而且不止检测上升沿脉冲,也检测下降沿脉冲,那么此时霍尔码盘旋转一圈会产生四倍于之前的脉冲数。这就是所谓的四倍频。利用四倍频可以提高检测精度。
四、测速程序设计
上面介绍了这么多理论知识,下面我们动手来实现一下利用霍尔编码器,用一个1:30减速比的减速电机,来实现测速。
4.1 跳变沿检测
检测跳变沿可以用两种方法,一种是使用外部中断,另一种是使用定时器的输入捕获功能。这里使用的是外部中断,只检测A相输出的上升沿,因此只需要配置一个引脚的外部中断,来检测上升沿并在中断中进行计数即可。外部中断初始化函数与中断服务函数如下
/*
*==============================================================================
*函数名称:Exit_Init
*函数功能:初始化外部中断
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void Exit_Init (void)
{
// 定义结构体
NVIC_InitTypeDef NVIC_InitStructure;
EXTI_InitTypeDef EXTI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
// 开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOE,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE); // 开启AFIO时钟
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB, GPIO_PinSource0); //选择GPIO管脚用作外部中断线路
// 配置GPIO结构体
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; // 下拉输入
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_SetBits(GPIOB,GPIO_Pin_0);
//EXTI0 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn; //EXTI0中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1; //抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority =3; //子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
EXTI_InitStructure.EXTI_Line=EXTI_Line0; // EXIT0
EXTI_InitStructure.EXTI_Mode=EXTI_Mode_Interrupt; // 中断
EXTI_InitStructure.EXTI_Trigger=EXTI_Trigger_Rising; // 上升沿触发
EXTI_InitStructure.EXTI_LineCmd=ENABLE; // 使能
EXTI_Init(&EXTI_InitStructure);
}
/*
*==============================================================================
*函数名称:EXTI0_IRQHandler
*函数功能:外部中断0中断服务函数
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
u32 gCunt = 0; // A相上升沿计数变量
void EXTI0_IRQHandler(void)
{
// 如果EXIT0中断标志位被置1
if(EXTI_GetITStatus (EXTI_Line0)==1)
{
gCunt = gCunt + 1;
}
EXTI_ClearITPendingBit (EXTI_Line0); // 清除中断标志位
}
4.2 计算转速
知道了怎么检测跳变沿并计数,我们就可以进行下一步,单位时间内读取跳变沿计数值。我们初始化一个定时器来进行时间控制。配置每一秒进入一次中断,读取一次跳变沿计数值,然后计算转速。转速的单位是RPM,也就是转每分。我们用一秒的脉冲计数乘以60,认为是一分钟的脉冲数,以此来计算电机转速。定时器配置函数以及中断服务函数如下
/*
*==============================================================================
*函数名称:TIM2_Iint
*函数功能:初始化定时器2
*输入参数:per:自动重装载值;psc:预分频系数
*返回值:无
*备 注:无
*==============================================================================
*/
void TIM3_Iint (u16 per,u16 psc)
{
// 结构体定义
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE); // 使能TIM2时钟
TIM_TimeBaseInitStructure.TIM_Period = per; // 自动装载值
TIM_TimeBaseInitStructure.TIM_Prescaler = psc; // 分频系数
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 不分频
TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; // 设置向上计数模式
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStructure);
TIM_ITConfig(TIM3,TIM_IT_Update,ENABLE); // 开启定时器中断
TIM_ClearITPendingBit(TIM3,TIM_IT_Update); // 使能更新中断
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; // 定时器中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=3; // 抢占优先级
NVIC_InitStructure.NVIC_IRQChannelSubPriority =4; // 子优先级
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // IRQ通道使能
NVIC_Init(&NVIC_InitStructure);
TIM_Cmd(TIM3,ENABLE); // 使能定时器
}
// TIM3中断服务函数
// 1s进入一次
u32 gSpeed = 0; // 转速
void TIM3_IRQHandler(void) // TIM3中断
{
if(TIM_GetITStatus(TIM3,TIM_IT_Update))
{
gSpeed = (gCunt * 60) / (30 * 13);
printf ("Speed = %d = RPM\r\n",gSpeed);
gCunt = 0; // 清零上升沿计数变量
}
TIM_ClearITPendingBit(TIM3,TIM_IT_Update);
}
该文章会绑定一个资源,资源是通过串口输入占空比,范围是0~999,然后串口会打印电机转速。电机驱动模块使用的是TB6612。关于TB6612,可以查看博主STM32外设系列专栏。