文章目录
- 一、Kill switch engagen
- 二、电源检查CBRK_SUPPLY_CHK
- 三、USB连接检查CBRK_USB_CHK
- 四、安全开关检查CBRK_IO_SAFETY
- 五、high Accelerometer bios
- 六、high gyro bios
- 七、compasss inconsistent
- 八、GPS报错
- 九、Accels inconsistent
- 十、偏航角一直漂移
- 十一、PREFLIGHT FAIL: ACCEL SENSORS INCONSISTENT - CHECK CALIBRATION
- 十二、PREFLIGHT FAIL: GYRO SENSORS INCONSISTENT - CHECK CALIBRATION
- 十三、PREFLIGHT FAIL: EKF INTERNAL CHECKS
- 十四、PREFLIGHT FAIL: EKF YAW ERROR
- 十五、PREFLIGHT FAIL: EKF HORIZ POS ERROR
- 十六、PREFLIGHT FAIL: EKF VEL ERROR
- 十七、PREFLIGHT FAIL: EKF HGT ERROR
- 十八、yaw estimate error
- 十九、CPU load too high / No CPU load information
- 二十、 Crash dumps present on SD,vehicle needs service
参考:
https://mbot1.blog.csdn.net/article/details/123157315
https://mbot1.blog.csdn.net/article/details/109605241
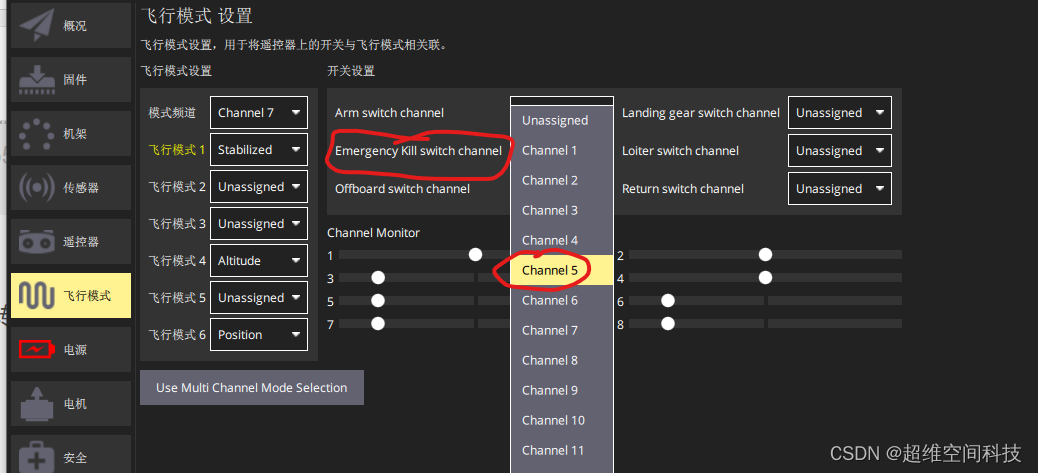
一、Kill switch engagen
出现这个报错是因为使能了刹车开关
解决方法:关掉刹车,下图设置为unassigned,
二、电源检查CBRK_SUPPLY_CHK
这个参数是检查解锁时是否有电池供电,默认是需要插电流计供电才可以解锁。如果想通过其他方式(如ESC供电)给飞控供电进行解锁,则需要设置该参数为894281。

三、USB连接检查CBRK_USB_CHK
这个参数是检查起飞时是否有USB连接,默认情况下有USB连接时是无法解锁的,如果需要插USB解锁,需要设置为197848

四、安全开关检查CBRK_IO_SAFETY
默认情况下安全开关是慢闪状态,设置该参数蔚22027时,上电后安全开关自动切换为双闪。

五、high Accelerometer bios
如果报错加速度偏移过大,high Accelerometer bios
可以把com_arm_ekf_ab这个参数调大一些,在1.13以后版本的固件中,把EKF2_ABL_LIM调大。
六、high gyro bios
同理可以通过改下面这个参数把陀螺仪的起飞检查阈值该大一些,com_arm_ekf_gb

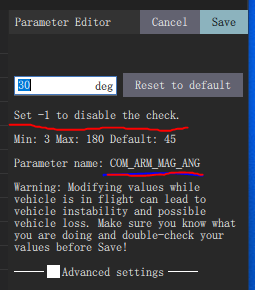
七、compasss inconsistent
如果报罗盘某个度数没包含的错误,COM_ARM_MAG_ANG设为-1
八、GPS报错
如果GPS搜星少,长时间没有进入GPS定位,可以把下面EKF2_GPS_CHECK改成0

九、Accels inconsistent

把下面这个COM_ARM_IMU_ACC改大一些,图中以加速度计为例,如果陀螺仪出现类似报错也是修改相应的参数

十、偏航角一直漂移
解决办法是校准陀螺仪
十一、PREFLIGHT FAIL: ACCEL SENSORS INCONSISTENT - CHECK CALIBRATION
当来自不同 IMU 单元的加速度测量值不一致时,会产生此错误消息。
此检查仅适用于具有多个 IMU 的板。
解决办法
将COM_ARM_IMU_ACC参数改大(可能要超限强制保存)。
同理
十二、PREFLIGHT FAIL: GYRO SENSORS INCONSISTENT - CHECK CALIBRATION
检查COM_ARM_IMU_GYR参数
十三、PREFLIGHT FAIL: EKF INTERNAL CHECKS
如果水平 GPS 速度、偏航角、垂直 GPS 速度或者垂直位置传感器(气压计默认情况下可以使测距仪或 GPS ,如果使用非标准参数)其中之一新息过多,会产生此错误消息。 新息指的是惯性导航计算预测值与传感器测量值之间的差异。
用户应检查日志文件中新息级别以确定原因。 这些可以在ekf2_innovations消息下找到。 常见问题 / 解决方案包括:
IMU 启动时漂移。 可以通过重启自驾仪来解决。 可能需要 IMU 加速度计和陀螺仪校准。
相邻磁干扰在飞行器运动中。 通过等待或者重新上电解决。
磁力计校准不良在飞行器运动中。。 通过重新校准解决。
启动时的初始冲击或快速移动导致惯性导航失败。 通过重新启动飞行器并在前 5 秒内最大限度地减少移动来解决此问题。
十四、PREFLIGHT FAIL: EKF YAW ERROR
当使用陀螺仪数据估计的偏航角和来自磁力计或外部视觉系统的偏航角不一致时,产生该误差。
检查 IMU 数据是否存在较大的偏航率漂移,并检查磁力计的对准和校准。
可以修改COM_ARM_EKF_YAW关闭此检查
十五、PREFLIGHT FAIL: EKF HORIZ POS ERROR
当 IMU 和位置测量数据(GPS 或外部视觉)不一致时会产生此问题。
检查位置传感器数据是否存在不真实的数据跳转。 如果数据质量看起来不错,请执行加速度计和陀螺仪校准并重新启动飞行器。
可以通过COM_ARM_EKF_POS参数禁用
十六、PREFLIGHT FAIL: EKF VEL ERROR
当 IMU 和 GPS 速度测量数据不一致时会产生此错误。
检查 GPS 速度数据是否存在不真实的数据跳转。 如果 GPS 质量看起来没有问题,请执行加速度计和陀螺仪校准并重新启动飞行器。
可以通过COM_ARM_EKF_VEL参数禁用
十七、PREFLIGHT FAIL: EKF HGT ERROR
当 IMU 和高度测量数据不一致时会产生此错误。
执行加速度计和陀螺仪校准并重新启动飞行器。 如果错误仍然存在,请检查高度传感器数据是否存在问题。
可以通过COM_ARM_EKF_HGT参数禁用
十八、yaw estimate error
如果报错 yaw estimate error ,则把下面参数改大
COM_ARM_EKF_YAW
十九、CPU load too high / No CPU load information
COM_CPU_MAX
该参数设置为-1将禁用CPU利用率检查,如果改参数大于0,当飞控CPU利用率大于该值或者检测不到CPU信息时,将不能解锁,报下面的错:
Fail: No CPU load information
或者
Fail: CPU load too high:
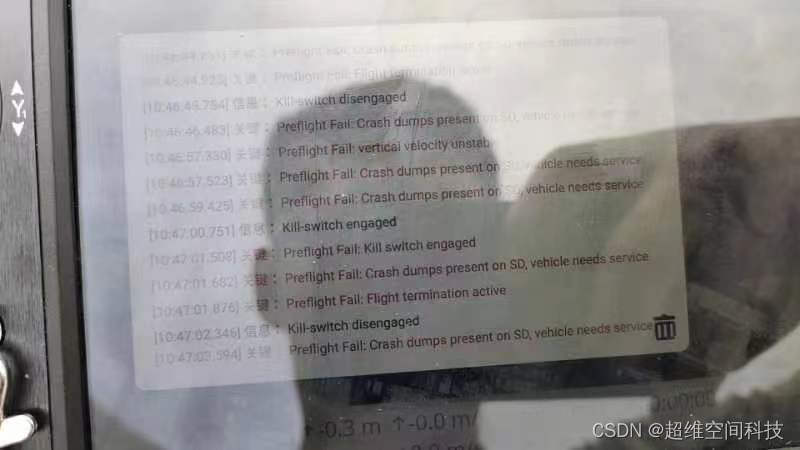
二十、 Crash dumps present on SD,vehicle needs service
如果报错:
Crash dumps present on SD,vehicle needs service
将COM_ARM_HFLT_CHECK改为Disabled