Docker资源限制
- 一、cpu资源控制
- 1、 设置cpu使用率上限
- 2、设置cpu资源占用比(设置多个容器时才有效)
- 3、设置容器绑定指定的CPU
- 三、内存资源控制
- 四、磁盘IO配额控制
- 1、限制Block IO
- 2、限制bps和iops进行限制
一、cpu资源控制
cgroups是一个非常强大的linux内核工具,他不仅可以限制被namespace隔离起来的资源,还可以为资源设置权重、计算使用量,操控进程启停等等,所以cgroups(control groups)实现了对资源的配额和度量。
cgroups有四大功能
- 资源限制: 可以对任务使用的资源总额进行限制
- 优先级分配: 通过分配cpu时间片数量以及磁盘IO带宽大小,实际上相当于控制了任务运行优先级。
- 资源统计: 可以统计系统的资源使用量,如cpu时长,内存用量等。
- 任务控制: cgroups可以对任务执行挂起,恢复等操作。
1、 设置cpu使用率上限
linux通过CFS(completely fair scheduler,完全公平调度器)来调度各个进程对cpu的使用
-
我们可以设置每个容器进程的调度周期,以及在这个周期内各个容器最多能使用多少cpu时间。
-
使用 --cpu-period 即可设置调度周期,默认100ms,设置范围为:1ms-1s,对应的 --cpu-period的数值范围是1000~1000000。
-
使用 --cpu-quota 即可设置在每个周期内容器能使用cpu时间,默认无限制,设置的要求不能小于1ms,也就是–cpu-quota的值必须>=1000.
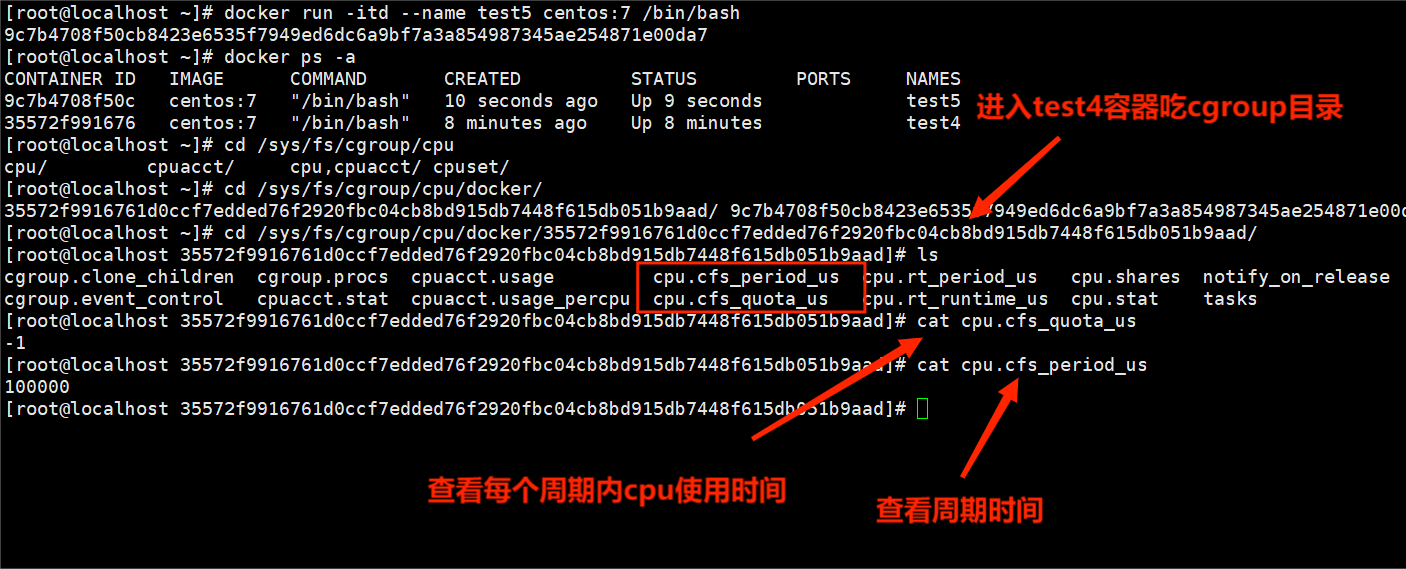
查看周期限制和cpu配额限制
docker run -itd --name test5 centos:7 /bin/bash
#启动一个centos:7镜像容器
docker ps -a
#查看是否启动成功,并查看pid号
cd /sys/fs/cgroup/cpu/docker/容器PID号
#进入到该容器的限制目录中
cat cpu.cfs_quota_us
#查看每个周期的cpu最大限制时间
cat cpu.cfs_period_us
#查看调度周期是多久
//cpu.cfg_period_us: cpu 分配的周期(微秒,所以文件名中用us表示),默认为100000
//cpu.cfg_quota_us: 表示该cgroups限制占用的时间(微秒),默认为-1,表示为不限制,如果设为50000,表示占用50000/100000=50%的cpu
进行cpu压力测试然后修改每个周期的使用cpu的时间,查看cpu使用率
docker run -itd --name test6 --cpu-quota 50000 centos:7 /bin/bash
#可以直接创建一个容器并设置每个周期cpu执行的时间
或者
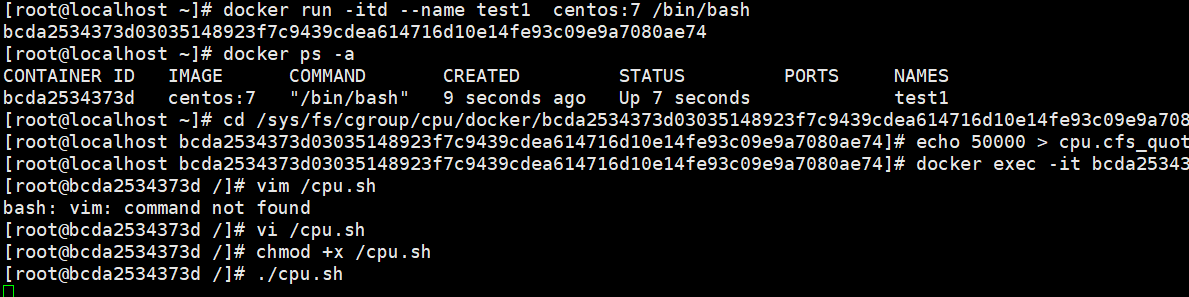
docker run -itd --name test7 centos:7 /bin/bash
cd /sys/fs/cgroup/cpu/docker/【容器pid】
echo 50000 > cpu.cfs_quota_us
#也可以先创建一个容器,然后进入到文件中直接修改cpu执行的实际的文件名称
docker exec -it 【容器id】 /bin/bash
#进入容器
vim /cpu.sh
#!bin/bash
i=0
while true
do
let i++
done
#创建死循环脚本,为了进行cpu压力测试
chmod +x /cpu.sh
./cpu.sh
#执行脚本
top
#查看这个容器中脚本占的多少的cpu资源

2、设置cpu资源占用比(设置多个容器时才有效)
Docker通过–cpu-shares指定cpu份额,默认为1024,值为1024的倍数。
- 在有多个容器竞争CPU时,我们可以设置每个容器能会用的CPU时间比例,这个比例叫做 共享权值。
- 共享式CPU资源,是按比例切分CPU资源,Docker默认每个容器的权值为1024。如果不指定或将其设置为0,都将使用默认值。
- 通过-cpu-share并不是cpu资源的绝对数量,而是一个相对的权重值,某个容器最终能分配到的cpu资源取决于它的cpu share占所有容器 cpu share综合的比例。换句话说,通过cpu share可以设置容器使用cpu的优先级。
比如,当前系统上一共运行了两个容器,第一个容器上权重是1024,第二个容器权重是512, 第二个容器启动之后没有运行任何进程,自己身上的512都没有用完,而第一台容器的进程有很多,这个时候它完全可以占用容器二的CPU空闲资源,这就是共享式CPU资源;如果容器二也跑了进程,那么就会把自己的512给要回来,按照正常权重1024:512划分,为自己的进程提供CPU资源。如果容器二不用CPU资源,那容器一就能够把容器二的CPU资源所占用,如果容器二也需要CPU资源,那么就按照比例划分。那么第一个容器会从原来使用整个宿主机的CPU变为使用整个宿主机的CPU的2/3;这就是CPU共享式,也证明了CPU为可压缩性资源。
两个容器设置比例然后压测
docker run -itd --name c1 --cpu-shares 512 centos:7
docker run -itd --name c2 --cpu-shares 1024 centos:7
#创建两个容器为c1和c2,若只有这两个容器,设置容器的权重,使得c1和c2的cpu资源占比为1/3和2/3

分别进入到c1和c2 容器中,进行压测
docker exec -it 【容器id】 /bin/bash
#进入容器
yum -y install epel-release
#安装epel源
yum -y install stress
#安装cpu压力测试工具
stress -c 4
#产生四个进程,每个进程都反复不停的计算随机数的平方根
查看容器磁盘占比
docker stats
#查看容器运行状态(动态更新)

3、设置容器绑定指定的CPU
–cpuset-cpus 是限制容器运行在指定的cpu核心
- 运行容器运行在哪个CPU核心上,例如主机有4个核心,cpu核心标识为0-3,我们一启动容器,只想让这台容器运行在标识0和3的两个CPU核心上,可以使用cpuset来指定。
docker run -itd --name c3 --cpuset-cpus 1,3 centos:7 /bin/bash
#启动一个容器,让它只使用内核1和内核3的资源
docker exec -it 【容器id】 /bin/bash
#进入容器
yum -y install epel-release
yum -y install stress
stress -c 4
#下载压力测试工具,并测试4个核
三、内存资源控制
与操作系统类似,容器可以使用的内存包括两部分:物理内存和Swap
Docker通过下面两组参数来控制容器内存的使用量
- -m 或 --memory : 设置内存的使用限额, 例如:100MB,2GB
- –memory-swap : 设置内存+swap 的使用限额 (这个必须要和–memory一起使用)
正常情况下,–memory-swap 的值包含容器可用内存和可用swap。所以 -m 300m --memory-swap=1g 的含义为:容器可用使用300M的物理内存,并且可以使用700M(1G-300)的swap
-
如果–memory-swap 设置为0 或者不设置,则容器可以使用的swap大小为-m值的两倍。
-
如果 --memory-swap 的值和-m 值相同,则容器不能使用swap
-
如果 --memory-swap值为-1。它表示容器程序使用的内存受限,而可以使用的swap空间不受限制(宿主机有多少swap空间该容器就可以使用多少)
docker run -itd --name m1 -m 200m --memory-swap=300M centos:7 /bin/bash
#允许该容器使用物理内存200M,swap空间为100m
docker stats
#查看容器使用资源情况
四、磁盘IO配额控制
Block IO 是另一种可以限制容器使用的资源,Block IO 指的是磁盘的读写,docker可通过设置权重,限制bps和iops的方式控制容器读写磁盘的带宽。
1、限制Block IO
默认情况下,所有容器能平等地读写磁盘,可以通过设置 --blkio-weight 参数来改变容器bliock IO 的优先级。–blkio-weight 与 --cpu-share类似,设置的是相对权重值,默认为500。
docker run -it --name b1 --blkio-weight 600 /bin/bash
docker run -it --name b2 --blkio-weight 300 /bin/bash
#上面两条中,b1容器读写磁盘的带宽是b2容器的两倍
2、限制bps和iops进行限制
bps 是 byte per second ,表示每秒读写的数据量。
iops 是 io per second ,表示每秒的输入输出量(或读写次数)
可以通过以下参数控制容器的bps和iops
-
–device-read-bps,限制读某个设备的bps(数据量)
-
–device-write-bps,限制写某个设备的bps(数据量)
-
–device-read-iops,限制读某个设备的iops(次数)
-
–device-write-iops,限制写某个设备的iops(次数)
对写bps进行限制的测试
docker run -it --name b1 --device-write-bps /dev/sda:1mb centos:7 /bin/bash
#创建容器,限制写的数数据量为1mb/s
dd if=/dec/zero of=test.out bs=1M count=10 oflag=direct
#测试是否是写入的1MB/S
清理docker占用的磁盘空间
docker system prune -a
#可以用于清理磁盘,删除关闭的容器、无用的数据卷和网络
sda:1mb centos:7 /bin/bash
#创建容器,限制写的数数据量为1mb/s
dd if=/dec/zero of=test.out bs=1M count=10 oflag=direct
#测试是否是写入的1MB/S
**清理docker占用的磁盘空间**
docker system prune -a
#可以用于清理磁盘,删除关闭的容器、无用的数据卷和网络