ROS,树莓派如何快速部署ROS
版本查看
检查Raspbian版本的最简单方法是利用终端。
- 在开始之前,请确保已经开启了一个终端会话。
在Raspbian中使用一个简单的命令来获取当前版本。
- 要查看当前安装的Raspbian版本信息,需要做的就是执行下面的命令。
cat /etc/os-release
- 该命令将打印出有关操作系统发布版本的各种信息。
在运行Raspbian Buster的Raspberry Pi上运行这个程序会得到以下结果。
PRETTY_NAME="Raspbian GNU/Linux 10 (buster)"
NAME="Raspbian GNU/Linux"
VERSION_ID="10"
VERSION="10 (buster)"
VERSION_CODENAME=buster
ID=raspbian
ID_LIKE=debian
HOME_URL="http://www.raspbian.org/"
SUPPORT_URL="http://www.raspbian.org/RaspbianForums"
BUG_REPORT_URL="http://www.raspbian.org/RaspbianBugs"
可以看到这个命令会给我们几个不同的指标来检查你正在运行的Raspbian的版本。
通过PRETTY_NAME、VERSION和VERSION_CODENAME选项,可以看到对Buster发布名称。
例如,如果运行的是Raspbian Stretch,那么VERSION_CODENAME将显示为VERSION_CODENAME=stretch。
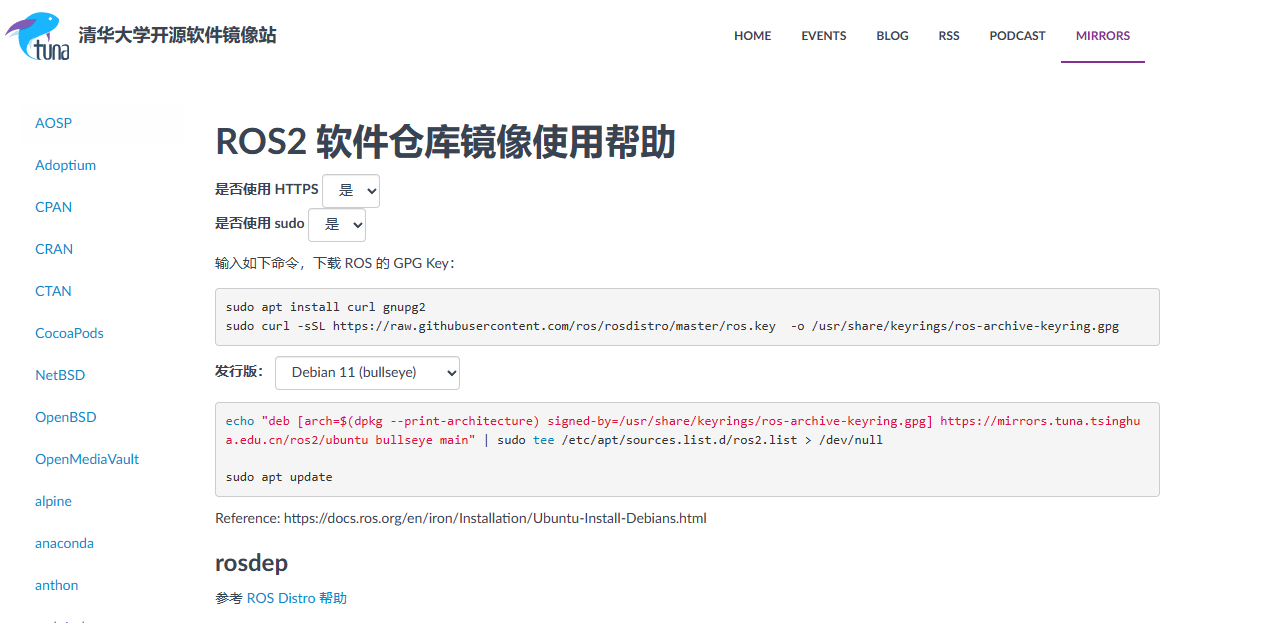
换源
根据系统版本进行选择
。链接:https://mirrors.tuna.tsinghua.edu.cn/help/ros2/
两行代码进行安装
wget https://github.com/Ar-Ray-code/rpi-bullseye-ros2/releases/download/ros2-0.3.1/ros-humble-desktop-0.3.1_20221218_arm64.deb
sudo apt install ./ros-humble-desktop-0.3.1_20221218_arm64.deb
加载ROS2
$ source /opt/ros/humble/setup.bash
#添加环境变量。这样每次打开 Terminal 就可以自动加载 ROS 2 相关的环境变量,不必每次都先source,进而使用 ROS 2 相关的命令
$ echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
$ros2
问题
树莓派4B安装64bit Debian bulleye后通过xrdp无法远程登录桌面.
-
登录树莓派后,打开这个文件:/etc/X11/xrdp/xorg.conf
-
在文件中找到:Option “DRMDevice” “/dev/dri/renderD128”
-
将上述这一行注释掉,增加:Option “DRMDevice” “”
-
保存后重新启动