等了许久,Beagle 社区官网终于上线了BeagleV-Ahead 的主页 网址 https://beagleboard.org/beaglev-ahead ,我们的系统软件评测将会以这个官方主页为出发点 ,进行一系列的系统软件功能等操作演示,因官网没有中文页面,我这里 把 主页内的文字 翻译成了中文 来方便大家对照 参考。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-qXgqy82H-1690037682386)(E:\2023-06-26_平头哥合作事宜\评测文章\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验.assets\image-20230718105357620.png)]](https://img-blog.csdnimg.cn/ff10f0b59f9f45b0bf62f2fa6e2da0c9.png)
上一篇介绍了 BeagleV-Ahead的硬件基本组成,以及各个接口的使用场景功能等,这一篇我们从拿到一个开发板开始,从软件层面来展示 BeagleV-Ahead 系统的一些软件特性,首先从BeagleV-Ahead 上电,连接显示器,作为一个独立的小型 PC使用,之后 使用USB转串口工具,使用终端命令行 方式 登录终端,作为嵌入式开发的角度来操作此款开发板,最后 讲解 如何 更新 官方提供的 不同系统镜像,分别烧录至 TF卡 EMMC等。
注意:拿到开发板后,默认运行了 ubuntu-23.04 系统,我们将会以这个为标准系统开始编写系统软件评测文章。
系统初体验
1. 开发板上电
上一篇文章有介绍过如果想到手后完整体验BeagleV-Ahead发行版系统,就需要使用 5V/DC 给开发板供电,才能使用MicroUSB 3.0接口OTG转接线连接 USB鼠标键盘等设备。
拿到开发板后,首先确保已经连接好WiFi天线,准备 好了5V/DC电源,就可以直接接入BeagleV-Ahead 进行上电。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-TxAC48UT-1690037682387)(E:\2023-06-26_平头哥合作事宜\评测文章\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验.assets\DSC05967.JPG)]](https://img-blog.csdnimg.cn/c99ce5d3d461418c810386b3ccdf368f.jpeg)
2. 连接必要设备
如果把BeagleV-Ahead当作一个小的PC来用 ,只是电源自然是不够的,因为你无法对其进行简单的交互,这时就需要 连接 显示器 ,以及鼠标键盘 来对系统进行一个交互操作,实现一个真正的个人小PC。
首先自行购买一根 microHDMI转HDMI的转接线连接至显示屏/电视(注意: 有些显示屏接口并没有标准的HDMI2.0接口,需要留意确认)。其次 自备一套 USB 鼠标键盘设备(建议使用 USB无线 鼠标键盘套装,不然还需要购买一个USB HUB来扩展USB接口),USB鼠标一端连接至MicroUSB 3.0 OTG TYPEA母头,另一端连接至BeagleV-Ahead MicroUSB口,连接成功后 如下示意图所示。

因USB HDMI都默认支持热拔插,且系统也有做适配支持,所以可以在 BeagleV-Ahead启动后 再进行连接。
3. 登录系统
按照上述步骤,连接成功HDMI到显示器后,屏幕默认就会显示一个大大的 BeagleBoard logo 背景图(桌面系统默认会自动登录 不需要手动输入用户名和密码),此时可以使用鼠标键盘 来操作 点击屏幕上应用来进行体验。
可能是因为系统显示优化还不够完善,第二次启动后会异常卡顿,建议Beagle官方尽快优化 解决。

4. 连接网络
登录系统后的第一件事就是看看有没有联网,如果你的旁边有 RJ45网线可以上网,那么强烈建议你直接使用RJ45网线连接开发板,来进行网络通信,连接RJ45网线 在上一篇硬件评测 网卡章节有介绍,连接成功后,BeagleV-Ahead系统会默认自动获取IP地址,可以在系统下 打开 Bash终端,输入 ping qq.com 确认。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-HAlM31E5-1690037682388)(E:\2023-06-26_平头哥合作事宜\评测文章\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验.assets\DSC05977.JPG)]](https://img-blog.csdnimg.cn/29d8c3fb2e954e6ba738ef7bbaddd2d9.jpeg)
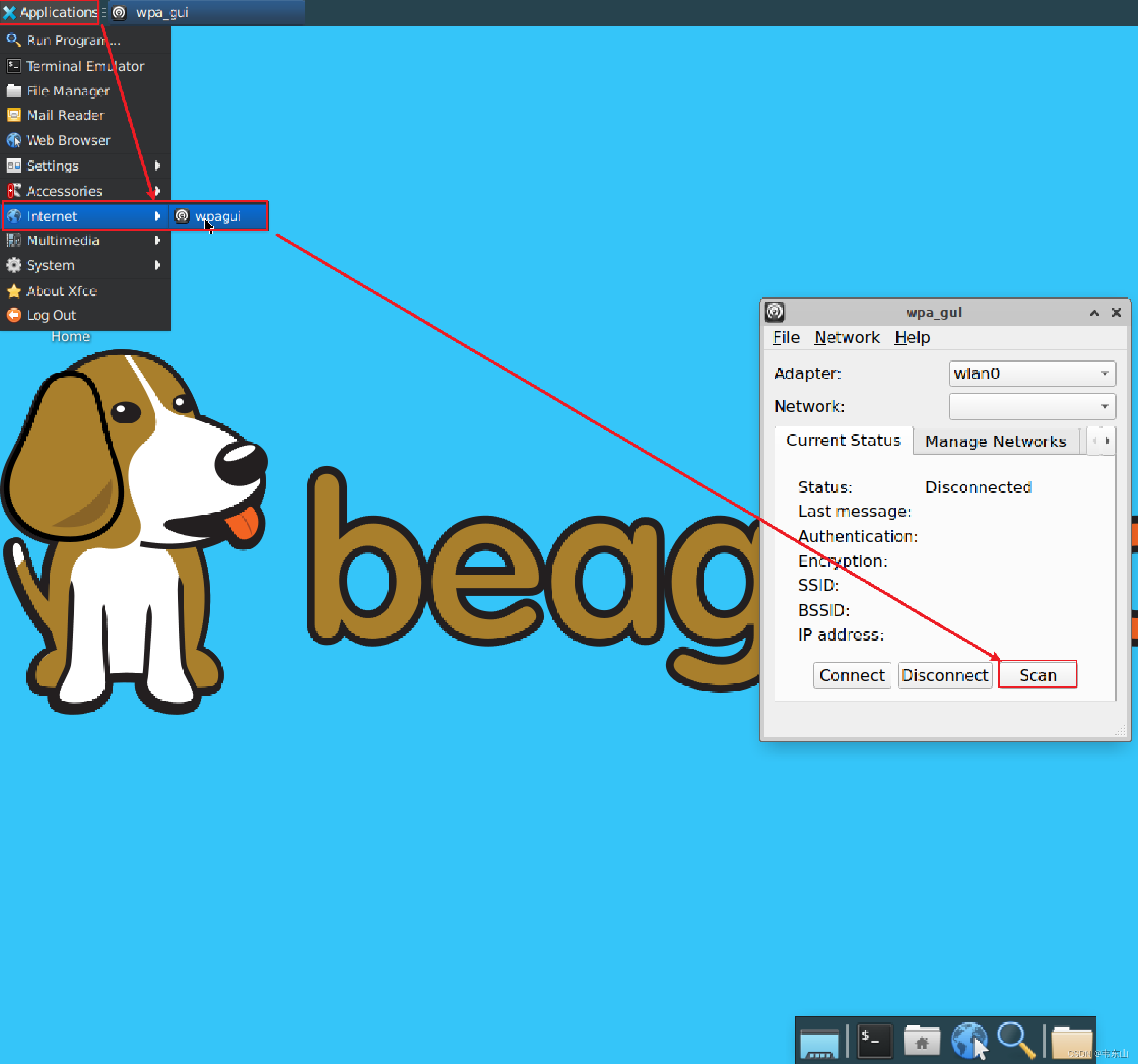
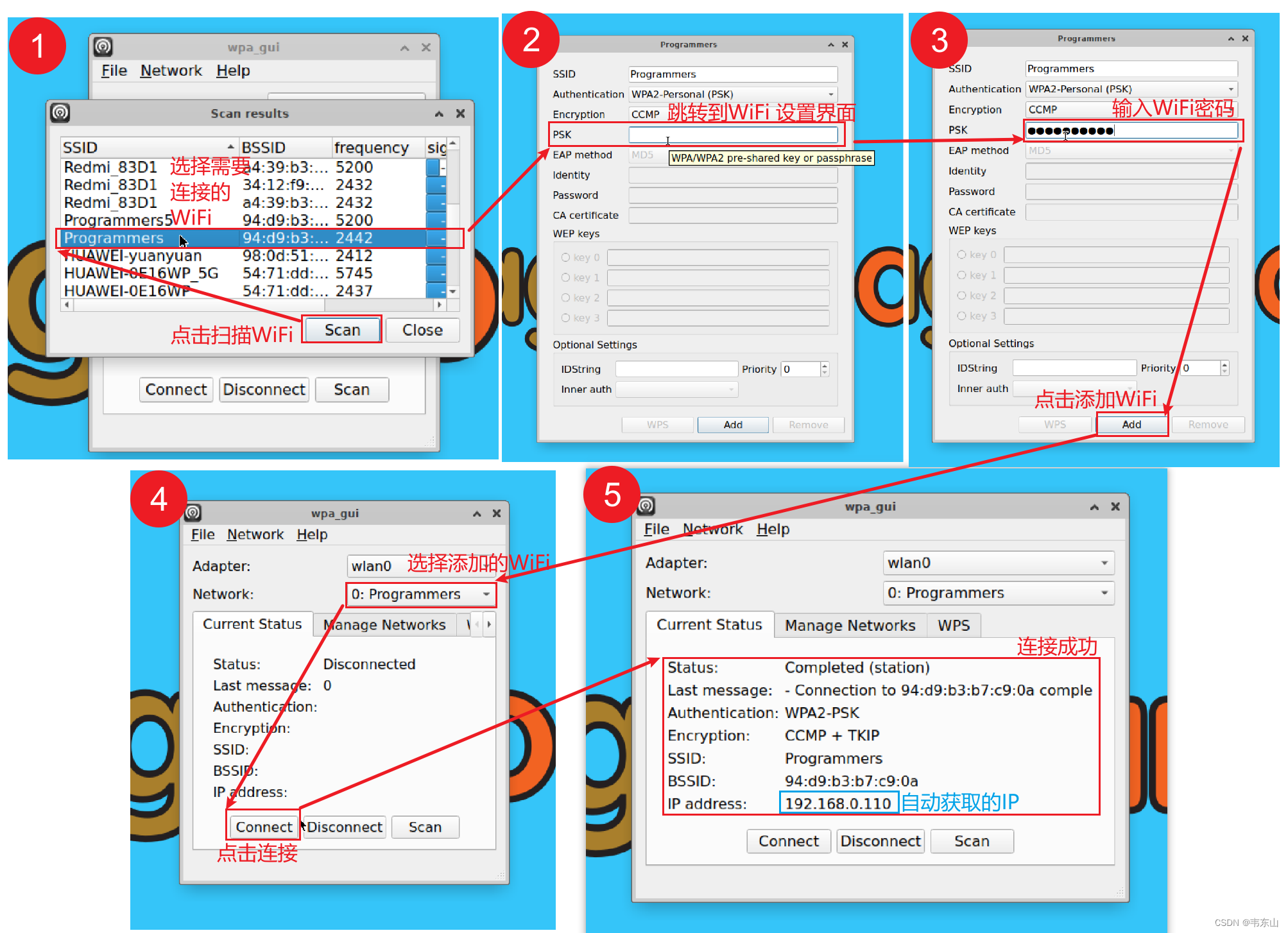
如果BeagleV-Ahead没有默认获取IP地址,可以按下BeagleV-Ahead RESET复位系统 来重启获取,如果重启后还是无法获取,那么请检查网线另一端路由器的配置。当然如果你的使用环境没有RJ45网线,只能通过 WIFI 无线的方式连接网络,也是可以的,接下来使用 nano 来编辑 /etc/wpa_supportion.conf 文件,在里面输入 您的 WiFi名称 和密码,保存退出,之后再次 重启 开发板 即可 通过 Bash终端下 Ping的方式 确认 或者 打开浏览器访问网页的方式确认
也可以截图来查看桌面的变化
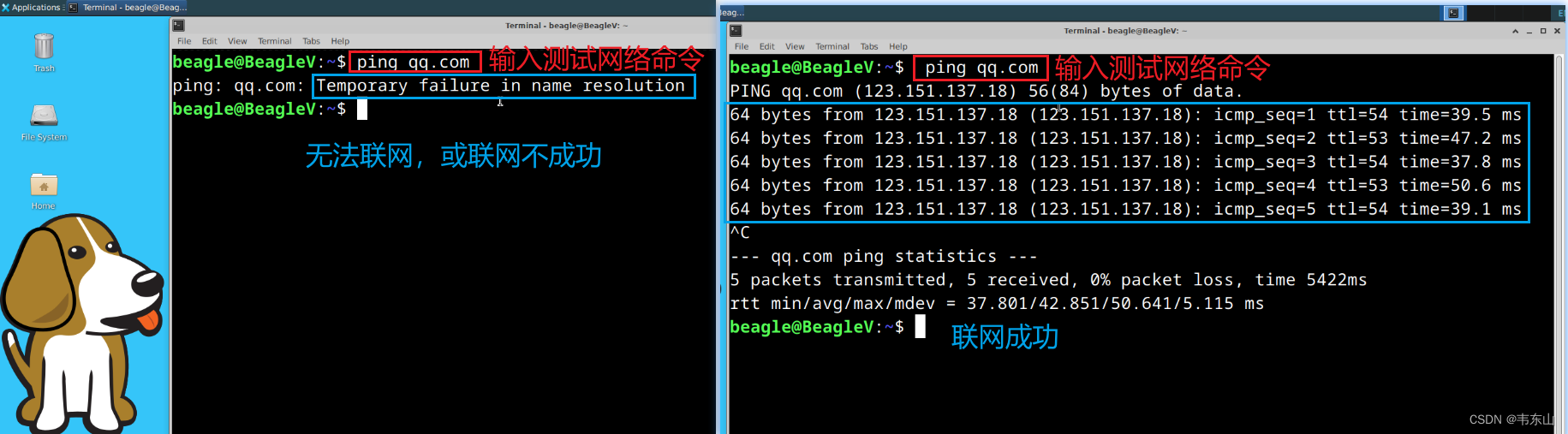
联网成功后就可以做很多有趣的事情了。
5. 系统体验
更新软件源,如果使用 sudo apt update 命令提示需要输入密码,默认的系统 密码为 temppwd 用户名为 beagle
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-AYvNNXJQ-1690037682388)(E:\2023-06-26_平头哥合作事宜\评测文章\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验.assets\12.bmp)]](https://img-blog.csdnimg.cn/61de2e50dbea48ce93810171ab727b2f.bmp)
安装htop软件包
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-WmelM1RD-1690037682389)(E:\2023-06-26_平头哥合作事宜\评测文章\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验.assets\13.bmp)]](https://img-blog.csdnimg.cn/ce755f2bcbc64cbfaca6913ecb836684.bmp)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2y2CdGM0-1690037682389)(E:\2023-06-26_平头哥合作事宜\评测文章\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验.assets\14.bmp)]](https://img-blog.csdnimg.cn/1068e529c7ad48c383a4cb16001ccec9.bmp)
开发Hello.c程序
如果只是运行安装现有的软件,体验起来似乎和PC机差不多,因为性能的原因 甚至还没有我们常用的X86 PC流畅,不过在嵌入式设备上我们可以做到平常PC很难实现的事情,就是很方便的开发属于自己的程序运行。 接下来讲解如何在 BeagleV-Ahead 开发编译运行自己的程序。
开发方式选择
在上一章节里面 介绍了把 BeagleV-Ahead当作PC使用 进行体验,因为目前优化问题,以及资源相对比较缺少的原因,无法直接使用 IDE或者 文本编辑器来编写代码,还是需要通过在终端下操作。
使用系统桌面开发
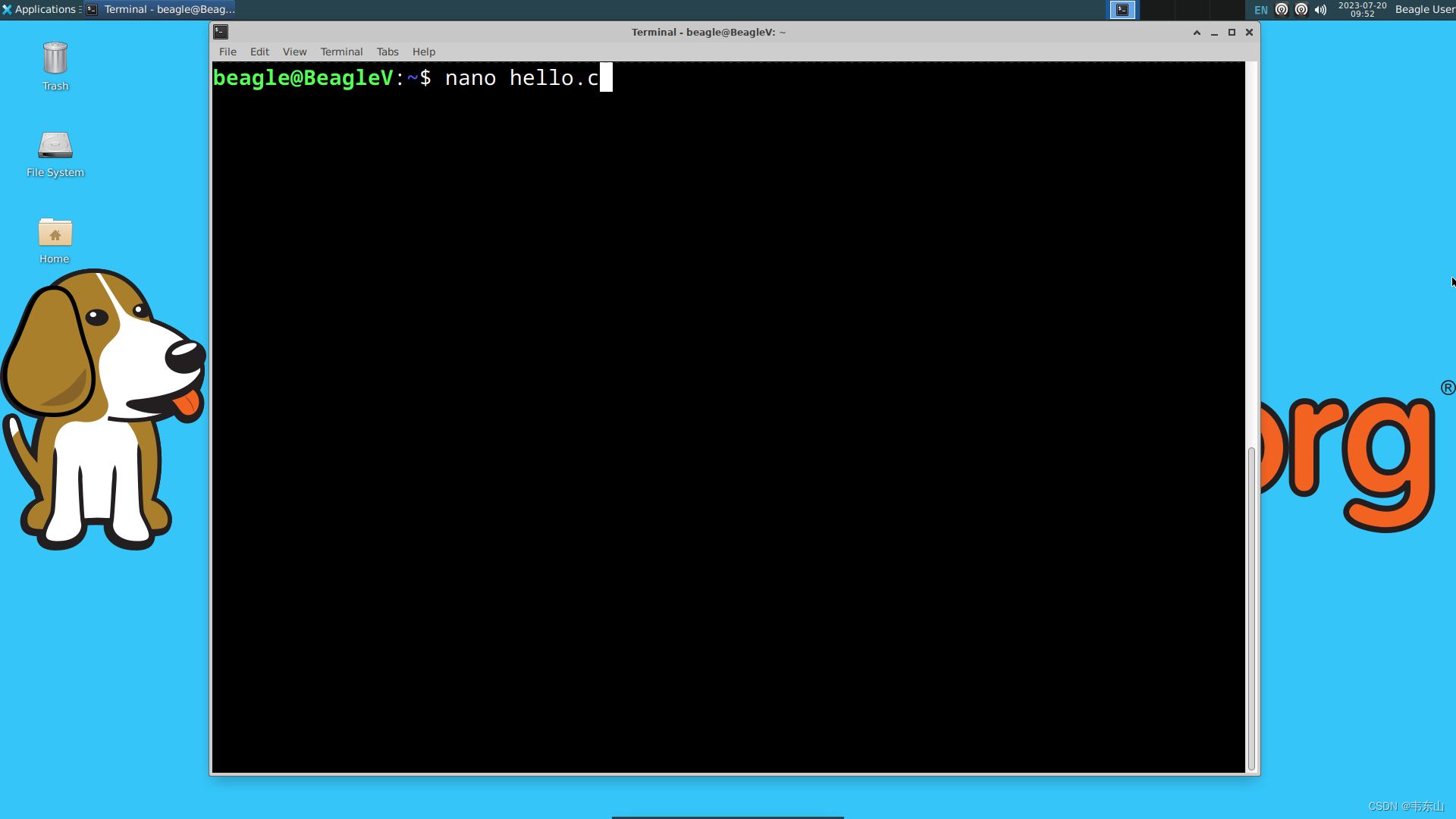
首先我们在保证 开发板的 显示器设备 键盘 都在连接的状态下,同时按下键盘上的 ctrl + alt + t 三个按键,系统就会自动弹出一个 bash终端,因为 系统默认没有安装 图形化 文本编辑器,所以我们需要使用 nano 工具在终端下进行文本编辑操作。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-dl1ODYY8-1690037682389)(E:\2023-06-26_平头哥合作事宜\评测文章\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验.assets\15-1689847326851-10.bmp)]](https://img-blog.csdnimg.cn/b8700e2bd70641c8ad28bb1c88171e2b.bmp)
使用USB串口开发
如果用显示器比较麻烦,而且当下并不具备这个条件 去在BeagleV-Ahead上进行开发,那么我们可以使用 BeagleV-Ahead默认预留的UART串口进行访问开发板终端,进而进行开发操作体验,其中 BeagleV-Ahead和 USB转TLL 串口模块 连接抽象示意图如下所示!
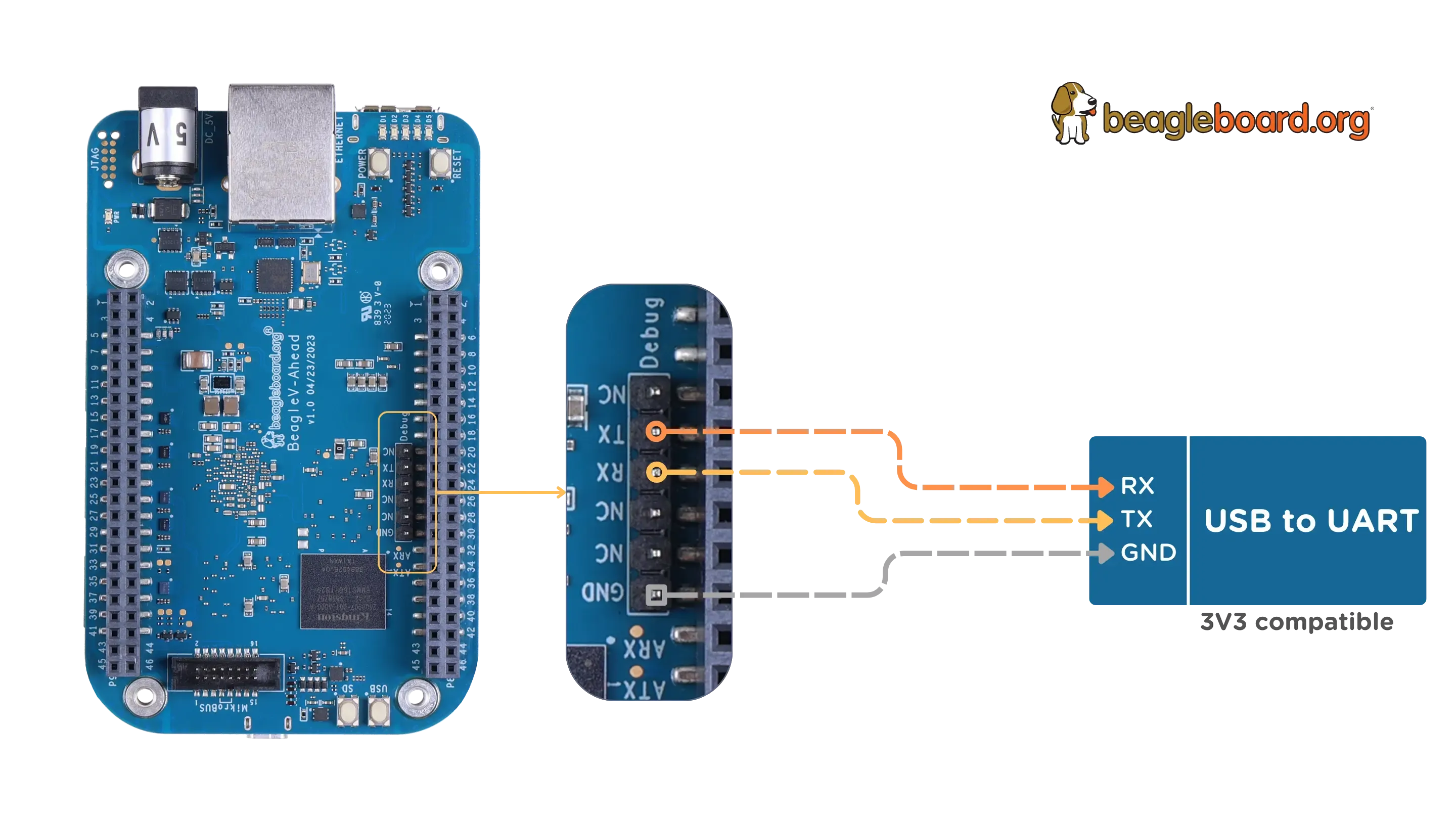
我这里找了一个常见的 CP210 USB 转TTL模块,一段连接至开发板 一段连接至电脑,中间通过 双母头 2.54杜邦线进行连接,连接成功后如下图所示,之后我们回到 电脑端,以Windows系统为例,首先安装USB串口驱动(wind10及以上系统默认会自动安装,如无法自动安装,可以使用 驱动精灵等工具来辅助安装)。安装成功后就可以通过 putty mobaxter minicom等工具来操作串口 和 BeagleV-Ahead进行交互了。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-LHHJMGYZ-1690037682389)(E:\2023-06-26_平头哥合作事宜\评测文章\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验.assets\DSC05950.JPG)]](https://img-blog.csdnimg.cn/da812fd919574114a45bcb099db12528.jpeg)
下面以使用Putty工具打开BeagleV-Ahead串口
- 对于Windows系统 此时Windows设备管理器 在 端口(COM和LPT) 处会多出一个串口设备,一般是以
USB-Enhanced-SERIAL CH9102开头,您需要留意一下后面的具体COM编号,用于后续连接使用。
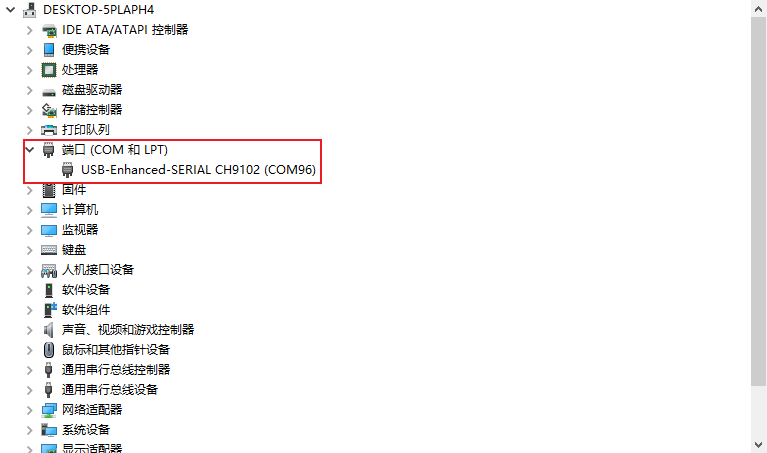
如上图,COM号是96,我们接下来连接所使用的串口号就是96。
接下来获取串口工具来开发 COM96设备,我们这里推荐使用Putty 一款小巧强大的多协议工具,其中putty工具可以访问官网页面 https://www.chiark.greenend.org.uk/~sgtatham/putty/ 来获取,下载完成后双击打开接口运行。
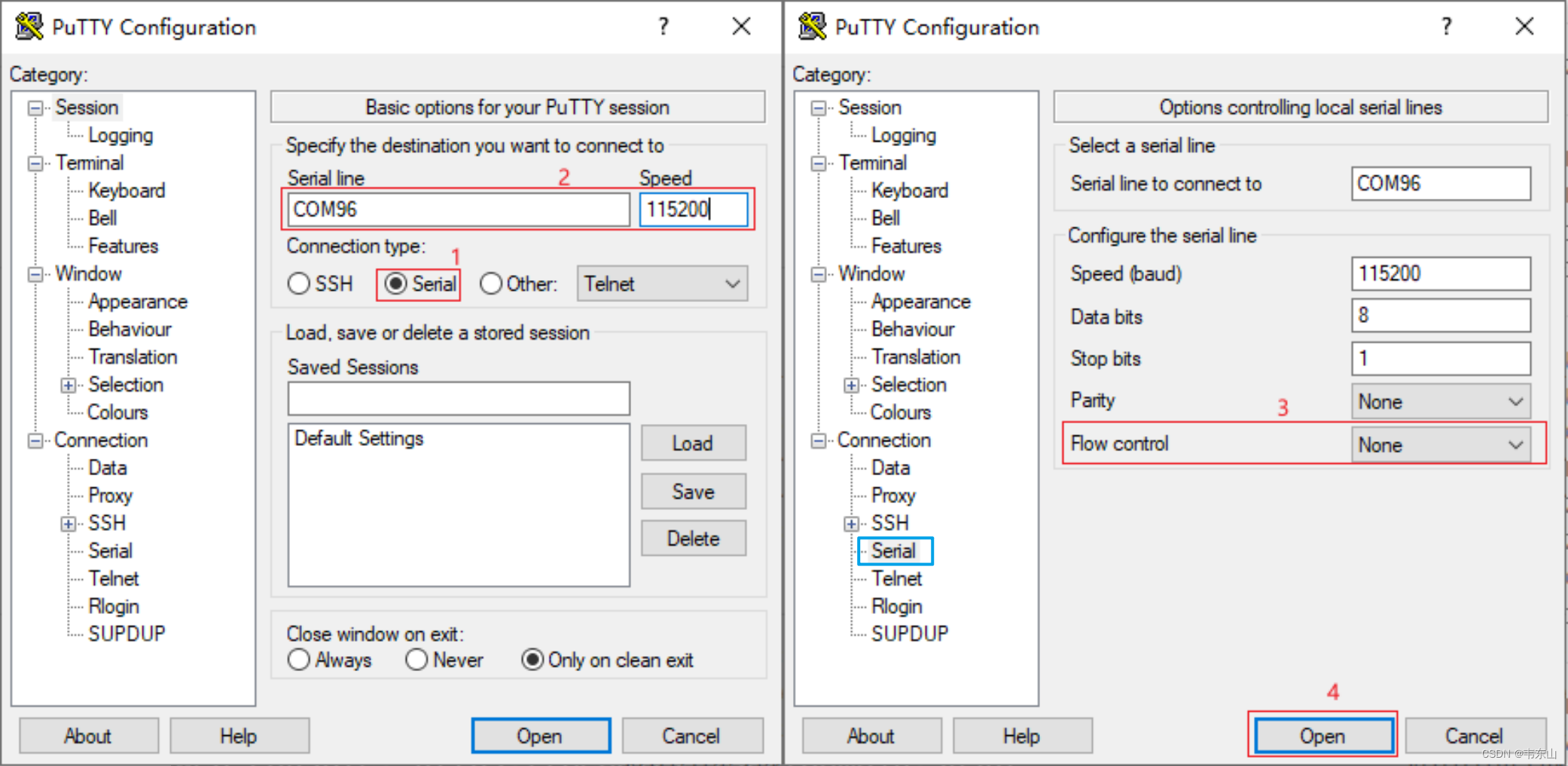
如下图所示,打开putty后,主界面,参考图片从左 到右 红框字体所示,分别 设置 连接类型 为 Serial Serial Line 为COM96 Speed 为115200 ,有图左下角 切换到 serial 界面,设置 Flow control 为 None 最后 点击 Open 即可 打开 BeagleV-Ahead的串口界面。
最后可以看到系统弹出了一个 终端的对话框 可以按下 windows电脑的键盘Enter键 ,进入到终端模式,就可以通过串口和BeagleV-Ahead进行交互操作了。
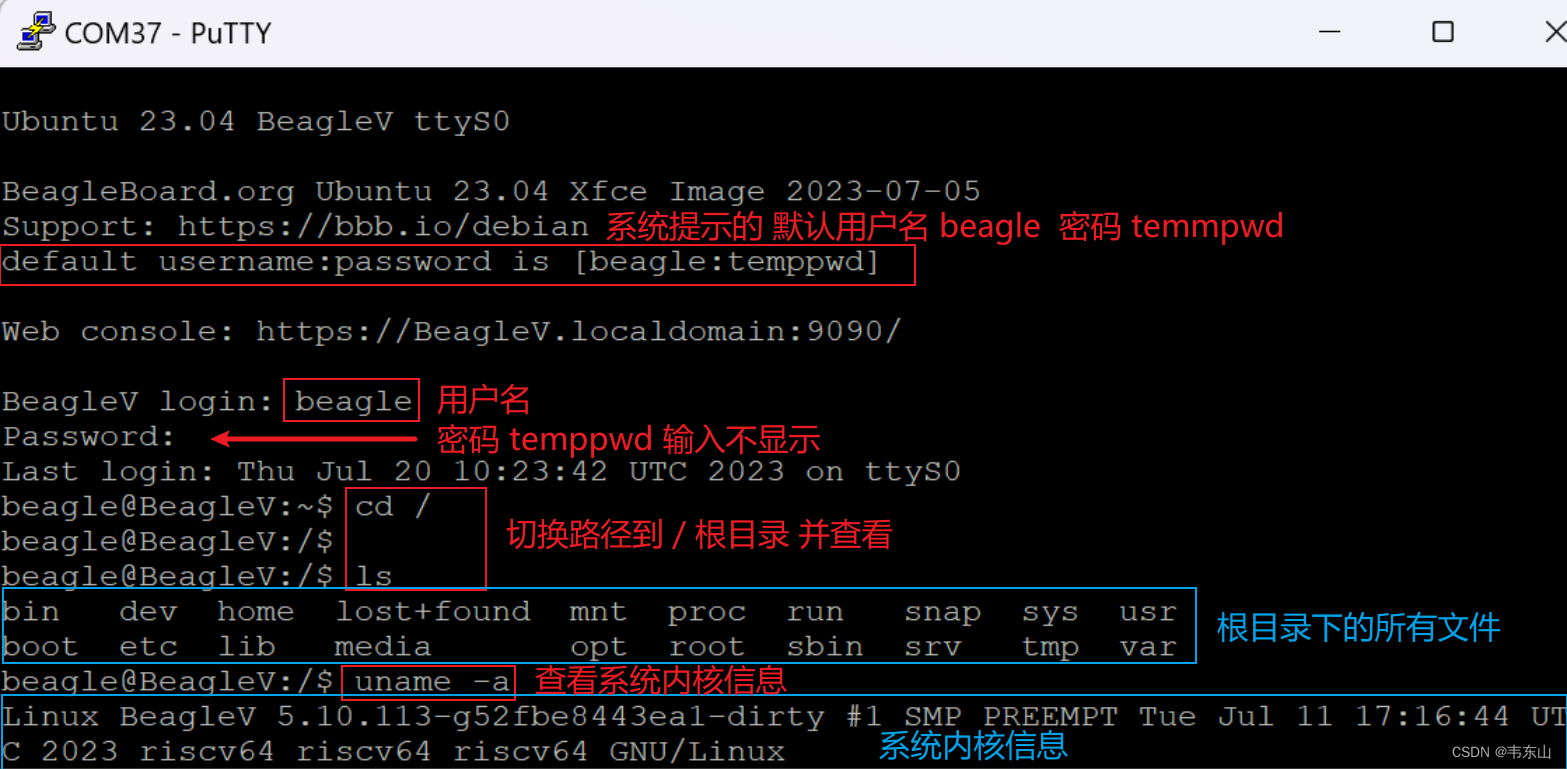
初次使用串口登录,系统会提示 需要你 输入用户名和密码 登录,BeagleV-Ahead默认的 用户名是 **beagle ** 密码是 temppwd
编写运行程序
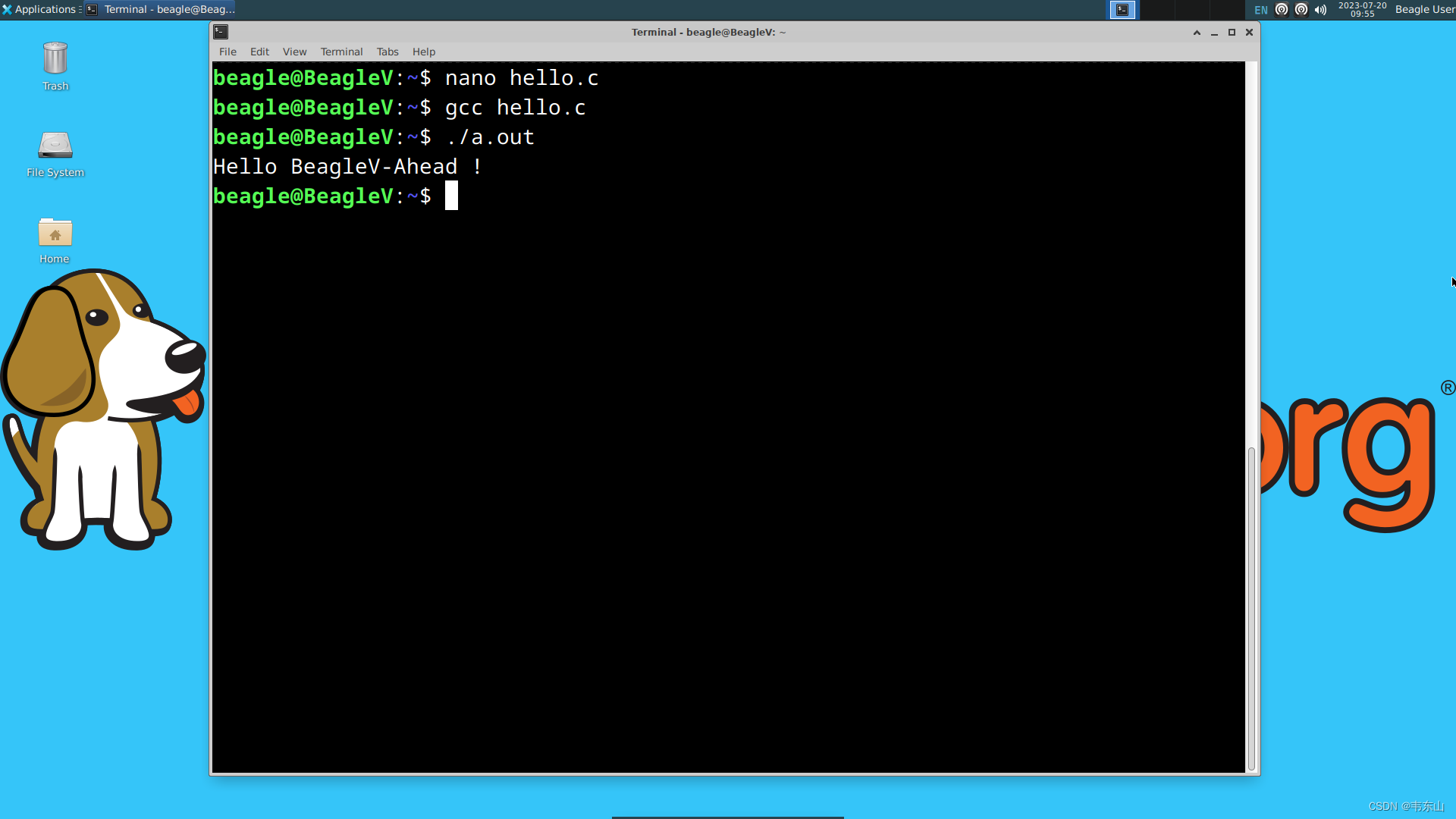
进行系统后,我们就可以使用BeagleV-Ahead 编写并运行一个简单的 hello.c 程序 打印输出 Hello BeagleV-Ahead! 这句话!
编写程序
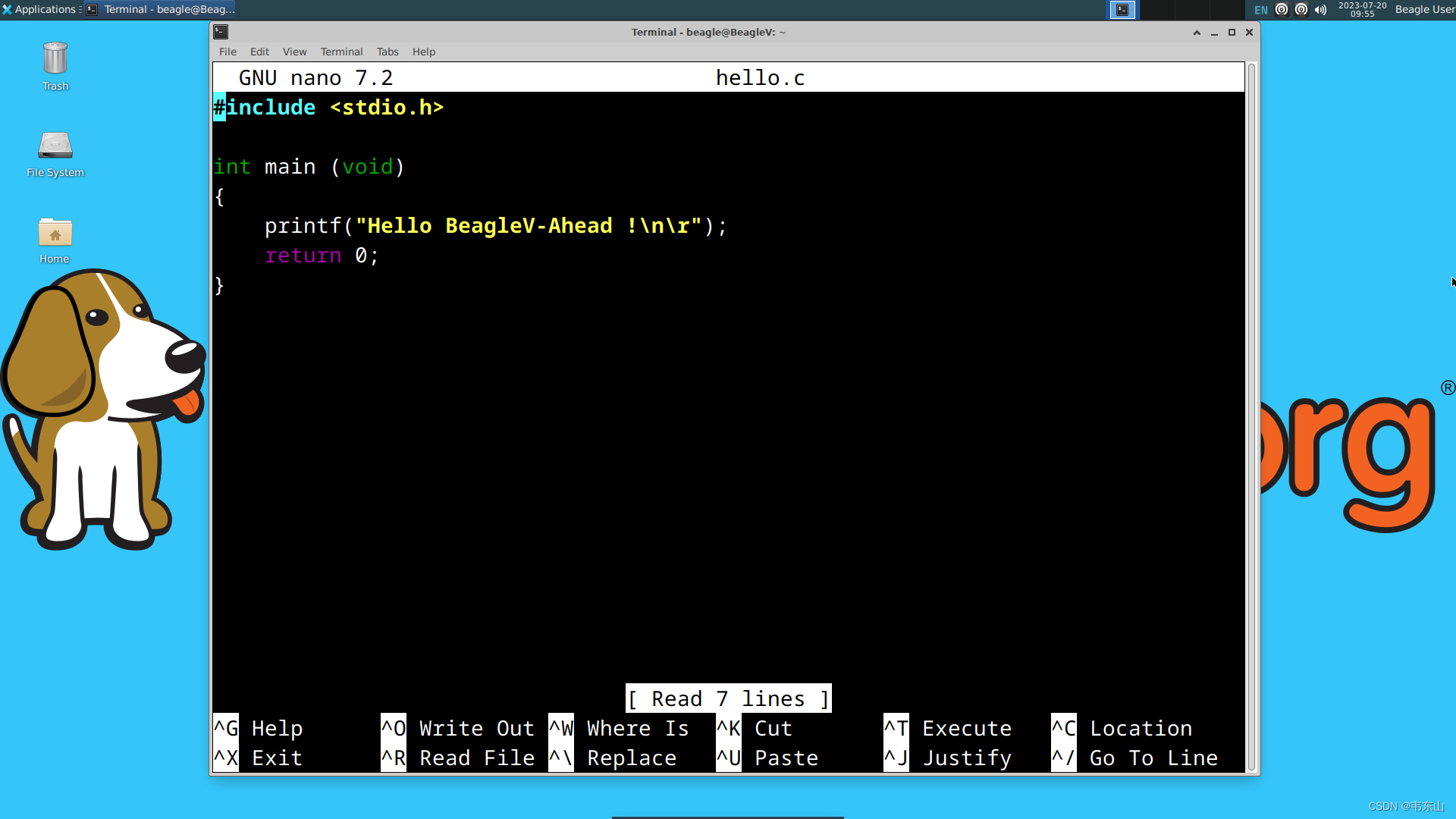
如下是一个简单的示例代码,通过 nano 或者 vim等命令 新建一个 hello.c文件,然后输入进入,保存退出
#include <stdio.h>
int main (void)
{
print("Hello BeagleV-Ahead! \n\r");
return 0;
}
截图介绍 如何 使用 文本编辑器,怎么写入代码 怎么保存
编译运行
大家应该都知道,计算机硬件只认识0 1 0 1数字,无法直接运行我们编写好的程序,这时我们就需要把 我们写好的程序转换成计算机可以识别的机器码语言,这个转换过程 一般叫做编译过程。既然谈到了编译,那么就需要有专门的编译器,在BeagleV-Ahead 编译 hello.c程序,直接使用系统预装的 GUN GCC就可以进行编译生成可以直接运行的程序。
gcc hello.c
编译完成后,会生成一个 可执行程序,这个程序是 ./a.out 我们直接运行,就可以看到打印出来的 **"Hello BeagleV-Ahead!**字符。
./a.out
到此为止,整个简单的编译 运行程序示例演示完成,如果想要学习更多,可以 阅读 《UNIX环境高级编程》来学习更多开发。
更新eMMC 系统
注意:此教程运行环境基于windows系统,理论上 windows 10及以上系统都支持
获取镜像
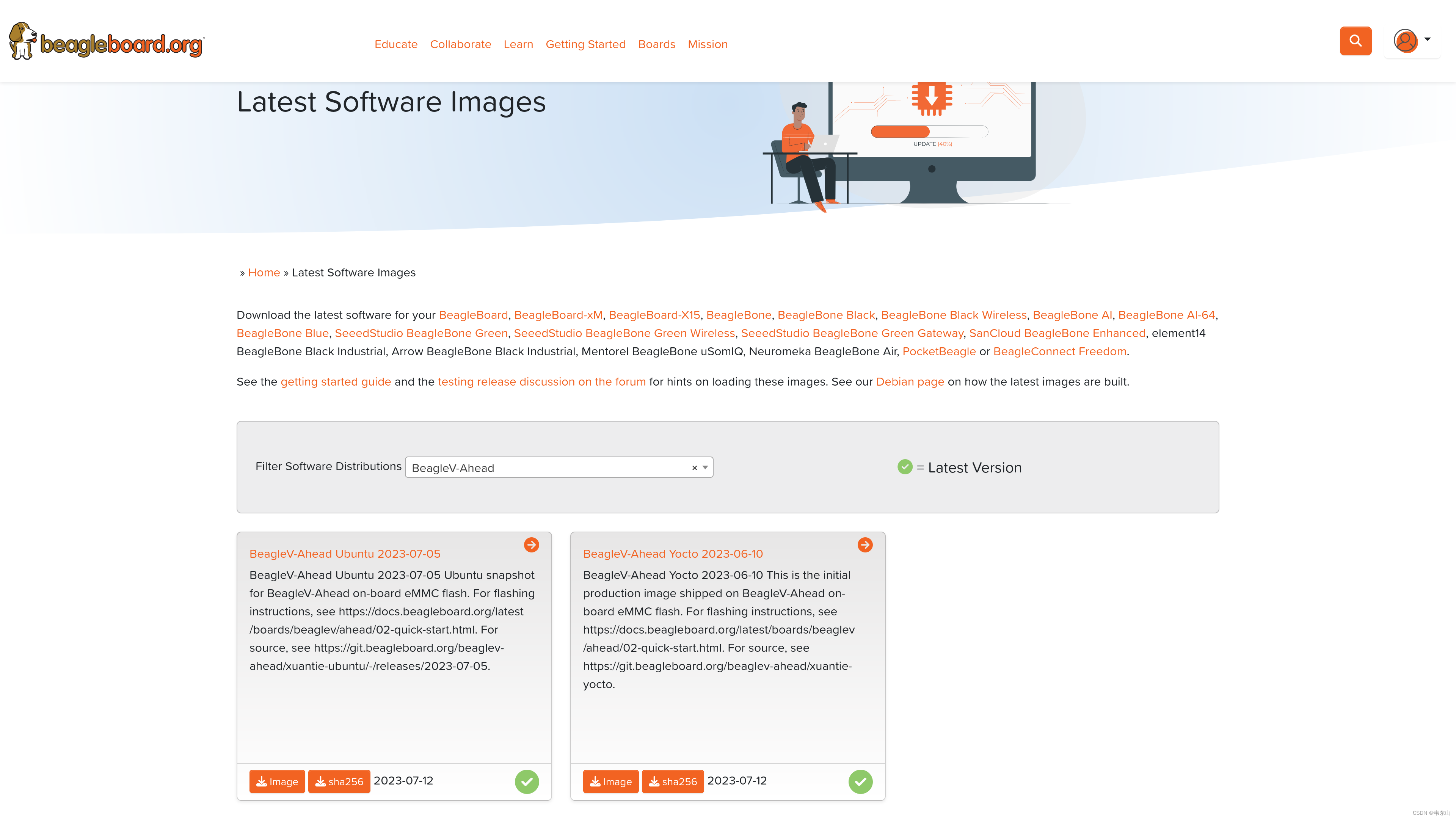
使用浏览器访问 https://www.beagleboard.org/distros 页面,即可看到 所有的 Beagle 社区支持的系统镜像,我们需要找到 BeagleV-Ahead专用的系统镜像,可以根据左侧字体 Filter Software Distributions 点击 下拉框 选择 BeagleV-Ahead 板子,同时留一下 右侧 绿色 √ 号 表示 长期支持更新版本,我们下载时要根据这两个条件来选择适合自己的镜像,如下图所示,我这里截图 选中了 BeagleV-Ahead 板子,目前看到只有两个系统镜像的支持,分别时 ubuntu 以及yocto ,在这里我要简单介绍一下两个系统的区别,其中 ubuntu系统作为一个 发行版系统 主要是把BeagleV-Ahead作为一个PC使用,里面有丰富的应用 软件包,可视化的界面 人性化的交互体验,适用于大部分群体,另一个Yocto属于一个专业的自定义小系统,可以看作是转为 嵌入式开发者提供的一套镜像支持,用于更深入的针对BeagleV-Ahead开发,这个系统可玩性比较低,不建议非专用人员使用。
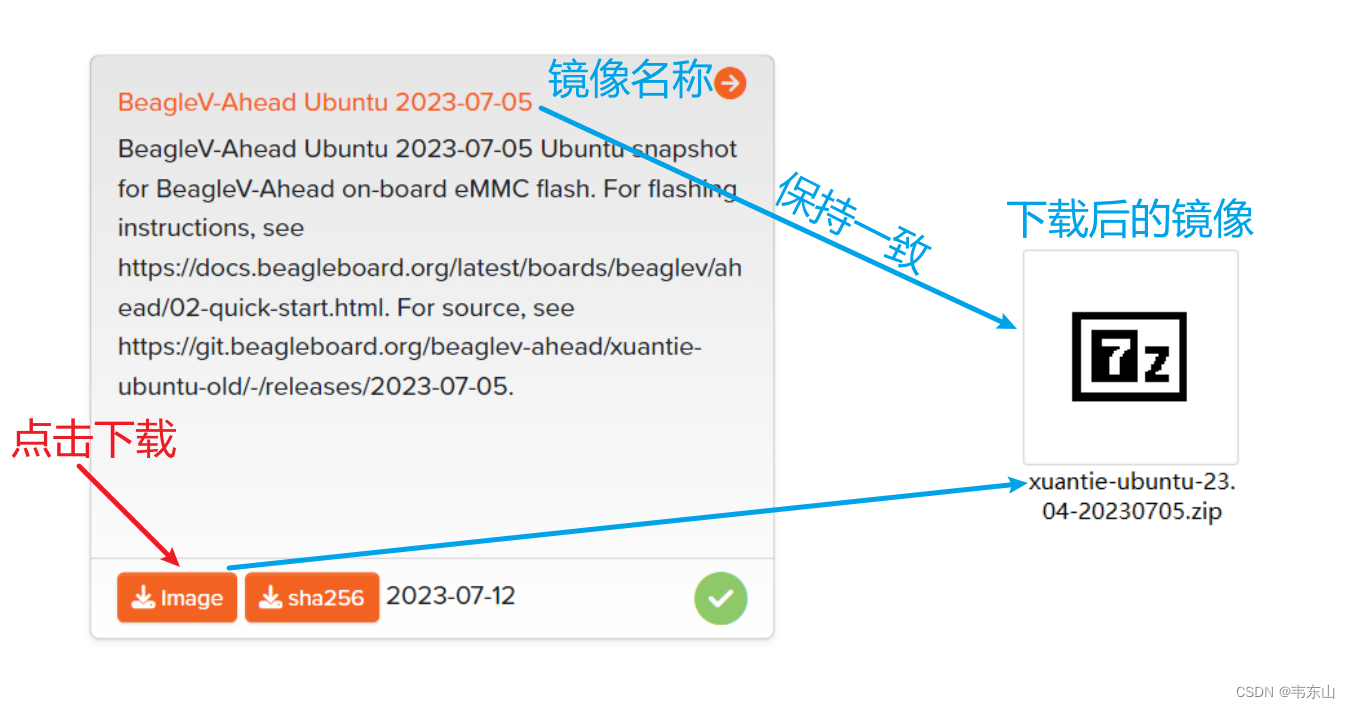
下载系统可以点击每个镜像 下面的 橙色 Image 按钮,直接点击即可下载,下载下来以后是一个 和 系统 名称 一样的.zip 压缩包,如下示意图所示。
进入烧录模式
在更新系统之前,我们要先准备好对应的系统镜像,请先参考上一节准备好需要更新的系统镜像,之后 参考 下图所示 按下 USB 按键 保持长按,接下来,将 MicroUSB 线一端 连接至BealgeV-Ahead ,另一端连接至 电脑USB接口(建议3.0 烧写会很快)。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-5KOcnW5B-1690037682391)(BeagleV-Ahead开机系统软件使用体验.assets/Flash-eMMC.webp)]](https://img-blog.csdnimg.cn/8f046f9110574fd3bfa40b9c9682a8ff.webp)
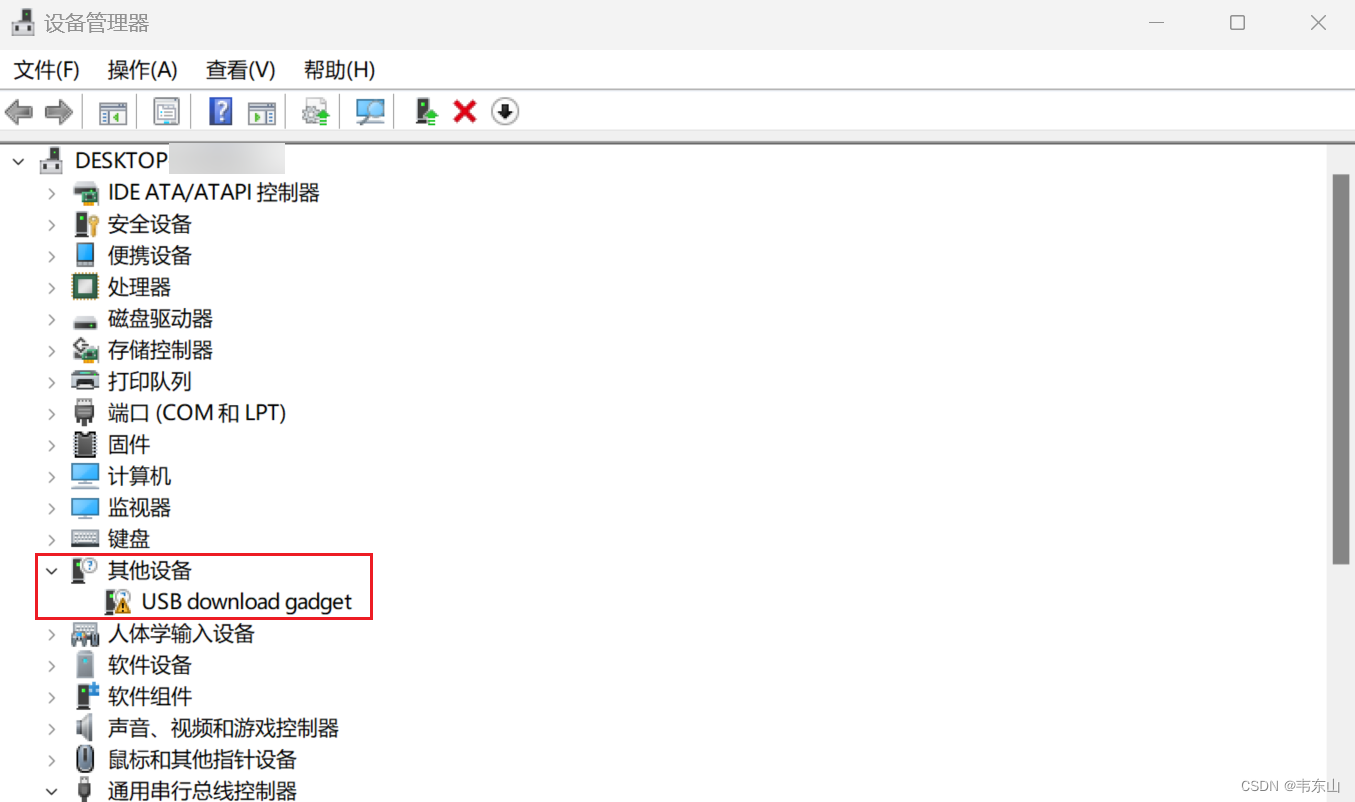
连接成功后,可以看到Windows电脑的设备管理器 弹出来一个 名为 USB download gadget的 设备,这就表明 我们已经进入了USB烧录模式,但是目前因为 Beagle 还并未发布 windows下的 烧录工具,所以此章节 我暂时先使用 虚拟机 ubuntu系统 来进行演示烧录操作。
windows下识别到设备后,我们需要将此设备 通过 连接的方式 连接到ubuntu 18.04虚拟机内,我这里使用了 vmware虚拟机工具,其中连接设备到 ubuntu系统的步骤如下箭头所示,分别点击vmware软件顶部菜单栏 虚拟机 --> 可移动设备 —> USB download gadget —> 连接 即可将设备连接至 虚拟机内,连接成功后就可以开始后续的烧写步骤了。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-InX56SlP-1690037682391)(E:\2023-06-26_平头哥合作事宜\评测文章\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验.assets\image-20230720160603046.png)]](https://img-blog.csdnimg.cn/27de2e663f344bb5beb716870ea7c00f.png)
运行烧写工具
前几小节 我们已经准备好了硬件环境 需要烧录的系统镜像,接下来就可以进入到真正的烧录过程里面了,参考官方 https://docs.beagleboard.org/latest/boards/beaglev/ahead/02-quick-start.html#flash-the-latest-image-on-emmc 的一个说明,我这里使用的 Ubuntu-18系统 所以需要先安装 android-sdk-platform-tools 这么一个软件包 之后将 我们前面下载好的镜像 复制到 ubuntu 系统内,使用unzip解压缩 得到一个deploy 文件夹, 就可以进入 文件夹内 执行 sudo ./fastboot_emmc.sh 命令开始烧写,如下为比较详细的演示操作步骤 。
- 先将我们前面下载好的 镜像 通过 拖拽 或者 filezila 等工具 上传到 Ubuntu系统的 家 ~ 目录下,拖拽拷贝文件的方式如下所示。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-9rbCR87z-1690037682391)(E:\2023-06-26_平头哥合作事宜\评测文章\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验.assets\image-20230720161745159.png)]](https://img-blog.csdnimg.cn/fa740e3992fd4e6390ed6188eae88d8c.png)
- 在ubuntu可以联网的状态下,使用 sudo apt 命令安装 烧写工具 android-sdk-platform-tools ,如下所示,在Ubuntu系统下,同时按下 ctrl + alt + t 快速唤醒 终端。 具体操作步骤如下红框所示。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-6JgdAD6S-1690037682391)(E:\2023-06-26_平头哥合作事宜\评测文章\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验.assets\image-20230720162255544.png)]](https://img-blog.csdnimg.cn/a6a6ea6733cc45a6bbbea0d5a9bb90f8.png)
- 最后我们可以开始烧录操作,首先使用 cd命令 切换到 你前文 拖拽 存放 Ubuntu系统的目录,之后使用 unzip 解压缩命令解压镜像,最后进入到 解压后的镜像 deploy目录内,执行 sudo ./fastboot_emmc.sh 即可自动开始烧写,烧写完成后 会自动重启开发板系统 如下为操作演示步骤。
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-6cocDI6T-1690037682391)(E:\2023-06-26_平头哥合作事宜\评测文章\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验.assets\image-20230720163233594.png)]](https://img-blog.csdnimg.cn/1e3fd5e0c9454f26ade171fc3ddae104.png)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-2kI9du03-1690037682391)(E:\2023-06-26_平头哥合作事宜\评测文章\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验\BeagleV-Ahead开机系统软件使用体验.assets\image-20230720163332589.png)]](https://img-blog.csdnimg.cn/3bf6b91d70b94a888a0ee9942443422f.png)
烧录完成后,系统会自动重启,但是整个烧录过程 大约持续 3 - 5分钟,请大家烧录时耐心等待。
开发板 重启后,就是你烧录过的最新的系统镜像。可以参考前几篇的文章 进行使用最新的系统。