《合成孔径雷达成像算法与实现》
术语定义
目标
波束覆盖区
星下点
雷达轨迹
速度
方位向
零多普勒面
最短距离
最近位置
零多普勒时刻
波束宽度
目标轨迹
信号空间和图像空间
距离
斜距平面
地距
斜视角
距离横向
目标
是被SAR照射的地球表面上的一个假想点。实际上,雷达系统是对地球表面上的一个区域成像,但是为了建立SAR关系式,一般考虑用地面上的单个点来代表目标。这样的点称为点目标或点散射体,又简称为目标或散射体。
波束覆盖区
随着平台的前移,具有电磁能量的脉冲以一定的间隔向地面发射。在某个脉冲的发射过程中,雷达天线的波束投影到地面的某个区域,称其为波束覆盖区。该覆盖区的位置和形状由天线波束方向图和地球与雷达之间的几何关系决定,又称为雷达波束照射区。
星下点
星下点是直接位于传感器下方的地表点,所以星下点至传感器的连线是地球表面的法线。在地球圆球模型下,传感器至地心的矢量与地球表面相交于星下点,但在椭球模型下并非如此。
雷达轨迹
雷达轨迹指星下点在地球表面上的移动轨迹。
速度
这里考虑两种系统速度①:平台速度指平台沿飞行路径的速度,用Vs表示;波束速度指零多普勒线扫过地面的速度,也简称地速,用Vg表示。
波束速度Vg,是零多普勒线沿地球表面的速度。假设卫星姿态受控,因此波束中心近似指向零多普勒位置(或其他合适的参考位置),Vg就可以看成波束扫过地球表面的速度。对于一个高度为800km的卫星来说,由于轨道圆周大于轨迹圆周,所以Vg大约比Vs小12%。另外,因为地球半径和切向速度是变化的,所以不同轨道处的V。是不同的。
对于机载情况,Vs是飞机相对于地球的设计时速。因为,在机载SAR几何中,地球弯曲很小,这时可以假设Vg=Vs。实际上飞机的速度是变化的,但可以通过改变脉冲重复频率,使脉冲之间具有相等的地面间隔。
方位向
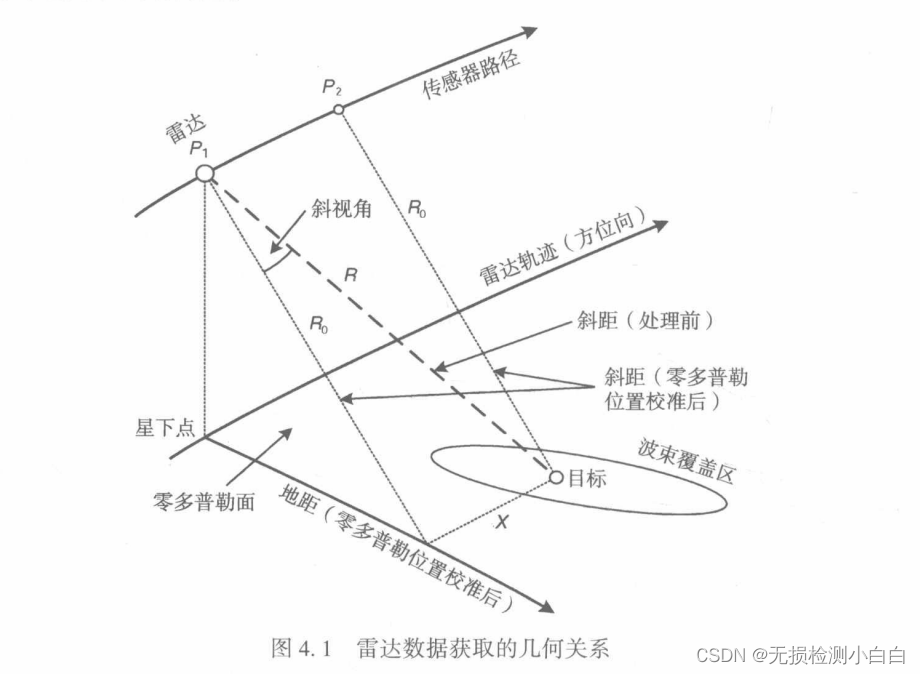
在SAR处理中,方位向与平台相对速度矢量(或者说ECR坐标系下传感器的速度矢量)一致。它可以看成与图4.1中单纯传感器运动相平行的一个矢量,或者看成图4.2所示的斜距平面内的一个矢量。
零多普勒面
这是一个垂直于平台速度矢量的包含传感器的平面(在ECR坐标系中)。它近似垂直于方位坐标轴,这里说“近似”是因为平台实际上可能存在起伏。这个平面与地面的交线称为零多普勒线。当此线经过目标时,传感器相对于目标的径向速度为零。
最短距离
随着平台的移动,雷达到目标的距离是随时间变化的。当距离达到最小值时(即零多普勒线经过目标时),称为最短距离,在图4.1中用R。表示。
最近位置
最近位置是指雷达最接近于目标的位置,如图4.1中的点P2。需要说明的是,由于波束的斜视,当传感器处于这个位置时,目标不一定能被照射到。
零多普勒时刻
零多普勒时刻是指传感器与目标最接近的时刻,它可以相对于任意起始时刻而定②。包括本书讨论的算法在内的大多数SAR处理算法,都将目标设定在其零多普勒时刻的位置,称为压缩至零多普勒。
波束宽度
雷达波束可以看成一个圆锥体,而波束覆盖区为圆锥体与地面相切形成的截面。雷达波束有两个重要量度:方位平面内的角宽和俯仰平面内的角宽。在每个平面内,半功率波束宽度,或简称波束宽度,由波束"边缘"角界定。波束边缘由辐射强度处于峰值以下3dB处的位置来定义①。
在方位向,天线激励是均匀的,则波束宽度近似等于波长除以方位向的天线长度。
在俯仰向,波束宽度决定了可成像的"距离带"宽度。它的公式相对复杂一些,因为俯仰向的辐射方向图通常由不均匀孔径形成。
雷达波束宽度不受地球弯曲和旋转的影响,但是以后将会看到,照射时间、方位向带宽和方位分辨率则受其影响(见4.5.5节)。
目标轨迹
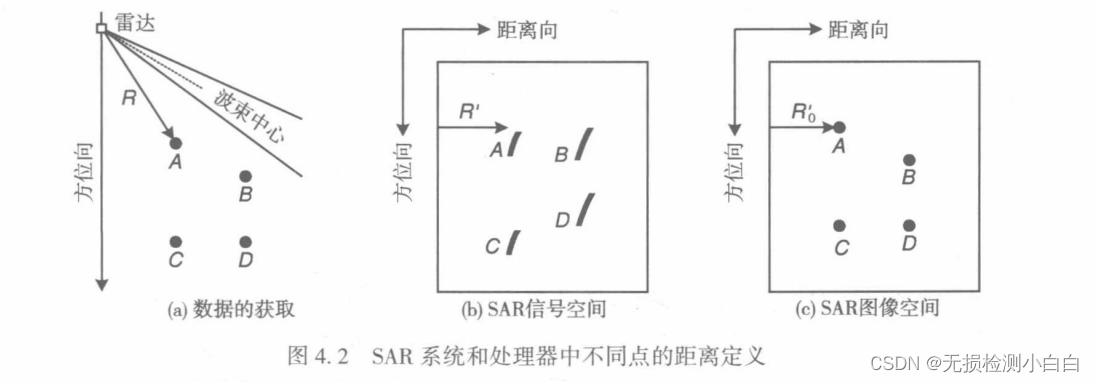
在雷达波束照射时间内,雷达到目标的距离是不停地变化的。表现在由距离和方位构成的二维图上,则为接收到的目标能量沿曲线分布,称其为信号空间内的目标轨迹,如图4.2(b)所示。
波束中心穿越时刻
波束中心穿越目标的时刻与零多普勒线穿越目标的时刻不同。当波束相对于零多普勒线的指向朝后时(即当波束中心穿越目标的时间晚于零多普勒线穿越目标的时间时),其值为正。它有时也称为波束中心偏移时间。
信号空间和图像空间
信号处理器中的SAR数据用到了两个二维空间。信号空间包含接收的SAR数据,而图像空间包含处理后的数据。雷达图像细节无法通过信号空间中的数据进行辨识,只有进一步处理输入数据以后,才会显现图像细节。处理后的数据定义在图像空间中,因为SAR数据已成为一幅含有信息的图像(见图4.2)。
距离
首先,距离一般指斜距或地距,如图4.1所示,前者沿雷达视线方向测量,而后者沿地面测量。由于所有SAR处理中都使用斜距的定义,如果不加特殊说明,那么一般情况下距离默认为斜距。
其次,需要在两种情况下考虑距离的定义:信号空间和图像空间。在信号空间中,距离测量的是雷达天线与地面目标的间隔。除非斜视角为零(见图4.1中的定义),否则它并不与方位轴垂直,这个距离方向称为雷达的视线,它近似沿着波束中心线或瞄准线,但其指向随着目标在波束内的位置而变化。经过SAR处理后,像点被置于最近点处的方位位置和距离位置,在该点处,距离轴垂直于方位轴②。
图4.2(b)示意了存于SAR处理器输入信号空间中的目标轨迹。它们依据各自的距离(水平方向)和波束中心穿越时刻(垂直方向)被定位。在此存储空间中,距离R'是相对于由距离延迟门(RGD)决定的第一个采样而言的,
R=R'+RGD c/2 (4.1)
RGD是从脉冲发射到第一个回波采样之间的时间延迟,光速c=2.997925×e8m/s。
在图4.2(c)中,目标在图像空间中被聚焦于与其零多普勒时刻相对应的位置。此时距离位于零多普勒方向(见图4.1中的Ro)。零多普勒时刻与天线斜视角无关,所以最终图像中的目标位置并不依赖于斜视角。与信号空间类似,距离变量R’是相对于处理后的第一个采样而言的,对于一个特定目标,其最短斜距为R₀=R+RGD c/2。
斜距平面
对于一个特定目标,这个平面包含了传感器相对速度矢量(在ECR坐标系中)和斜距矢量。对于不同距离R。上的目标,该平面与本地垂线的夹角是不同的。
地距
地距是指斜距在地面上的投影,如果图像要表示成类似地图的形式,则需要将斜距转换成地距。假设数据经过零多普勒位置校准,地距则是指与方位轴垂直并与地面平行的方向,其原点就是星下点(见图4.1)。
斜视角
斜视角θsq,是斜距矢量与零多普勒平面之间的夹角①,是描述波束指向的一个重要参数。它是在斜距平面内测量的,如果向下俯视(即投影到地面),那么它与波束偏航角是一致的。对于一个特定的波束指向,斜视角依赖于目标距离Ro。
需要注意的是,目标的零多普勒时刻与斜视角无关,但波束中心穿越时刻却依赖于斜视角。由于ECR坐标系中的零多普勒平面(即θsq测量的平面)考虑了地球的弯曲和旋转,因而θsq不是指惯性系中的斜视角。第12章将讨论利用波束指向和地球/平台几何关系计算θsq
距离横向
距离横向指的是与雷达视线正交的方向。除非斜视角为零,否则距离横向与方位轴并不平行。从理论上讲,应该用距离横向轴上的"方位"分辨率代替方位轴上的定义。但是,在条带SAR中,由于斜视角通常都很小,距离横向分辨率与方位分辨率没有明显区别。既然本书侧重于对条带数据的处理,全书将使用"方位分辨率"的一般定义,而距离横向和方位向的区别则在必要时指出。