之前已经介绍过线性回归的基本元素和随机梯度下降法及优化,现在把线性回归讲解完:
线性回归
- 矢量化加速
- 正态分布与平方损失
- 从线性回归到深度网络
- 神经网络图
- 生物学
矢量化加速
在训练模型时,我们常希望能够同时处理小批量样本,所以我们需要对计算进行矢量化,从而利用线性代数库,而不是使用效率低下的for循环,下面通过代码来直观展示矢量化的高效:
import math
import time
import numpy as np
import torch
from d2l import torch as d2l
n = 10000
a = torch.ones([n])
b = torch.ones([n])
# 定义一个计时器
# 注释#@save是一个特殊的标记,会将对应的函数、类或语句保存在d2l包中
class Timer: #@save
"""记录多次运行时间"""
def __init__(self):
self.times = []
self.start()
def start(self):
"""启动计时器"""
self.tik = time.time()
def stop(self):
"""停止计时器并将时间记录在列表中"""
self.times.append(time.time() - self.tik)
return self.times[-1]
def avg(self):
"""返回平均时间"""
return sum(self.times) / len(self.times)
def sum(self):
"""返回时间和"""
return sum(self.times)
def cumsum(self):
"""返回累计时间"""
return np.array(self.times).cumsum().tolist()
# 计算for循环时间
c = torch.zeros(n)
timer = Timer()
for i in range(n):
c[i] = a[i] + b[i]
print(f'for循环所用时间:{timer.stop():.9f} sec')
# 计算重载的+运算符来计算按元素的和
timer.start()
d = a + b
print(f'矢量化加速所用时间:{timer.stop():.9f} sec')
结果:
for循环所用时间:0.133013725 sec
矢量化加速所用时间:0.001002550 sec
正态分布与平方损失
在这里,通过对噪声分布的假设来解读平方损失目标函数。
正态分布(高斯分布)与线性回归的关系很密切。
概率分布概率密度函数如下:
p
(
x
)
=
1
2
π
σ
2
e
x
p
(
−
1
2
σ
2
(
x
−
μ
)
2
)
p(x)=\frac{1}{\sqrt{2π\sigma^2}}exp(-\frac{1}{2\sigma^2}(x-μ)^2)
p(x)=2πσ21exp(−2σ21(x−μ)2)
接下来对正态分布进行可视化,代码如下:
import math
import numpy as np
import torch
from d2l import torch as d2l
import matplotlib.pyplot as plt
# 定义正态分布函数
def normal(x, mu, sigma):
p = 1 / math.sqrt(2 * math.pi * sigma**2)
return p * np.exp(-0.5 / sigma**2 * (x - mu)**2)
# 可视化正态分布
# 使用numpy进行可视化
x = np.arange(-7, 7, 0.01)
# 均值和标准差对
params = [(0, 1), (0, 2), (3, 1)]
d2l.plot(x, [normal(x, mu, sigma) for mu, sigma in params], xlabel='x',
ylabel='p(x)', figsize=(4.5, 2.5),
legend=[f'mean {mu}, std{sigma}' for mu, sigma in params])
d2l.plt.show()
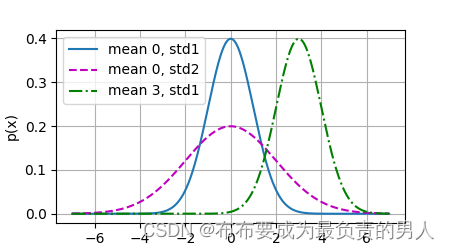
可以发现,改变均值会产生沿x轴的偏移,增加方差会分散分布、降低峰值。
下面内容学之前先复习一下极大似然估计,很多地方都自己推一下印象很深刻
均方误差损失函数(简称均方损失)可以用于线性回归的原因是:我们假设了观测中包含噪声,其中噪声服从正态分布。噪声正态分布如下式:
y
=
w
T
x
+
b
+
δ
其中,
δ
符合正态分布
N
(
0
,
σ
2
)
y=w^Tx+b+\delta\\ 其中,\delta符合正态分布N(0,\sigma^2)
y=wTx+b+δ其中,δ符合正态分布N(0,σ2)
因此,我们可以写出通过给定的x观测到特定y的似然:
P
(
y
∣
x
)
=
1
2
π
σ
2
e
x
p
(
−
1
2
σ
2
(
y
−
w
T
x
−
b
)
2
)
P(y|x)=\frac{1}{\sqrt{2π\sigma^2}}exp(-\frac{1}{2\sigma^2}(y-w^Tx-b)^2)
P(y∣x)=2πσ21exp(−2σ21(y−wTx−b)2)
现在,根据极大似然估计法,参数w和b的最优值是使整个数据集的似然最大的值:
P
(
y
∣
X
)
=
∏
i
=
1
n
p
(
y
(
i
)
∣
x
(
i
)
)
P(y|X)=\prod_{i=1}^np(y^{(i)}|x^{(i)})
P(y∣X)=i=1∏np(y(i)∣x(i))
根据极大似然估计法选择的估计量称为极大似然估计量。虽然会让很多指数函数的乘积最大化看起来很困难,但是可以在不改变目标情况下,通过最大化似然对数来简化,最终得到式子:
−
l
o
g
P
(
y
∣
X
)
=
∑
i
=
1
n
1
2
l
o
g
(
2
π
σ
2
)
+
1
2
σ
2
(
y
(
i
)
−
w
T
x
(
i
)
−
b
)
2
-logP(y|X)=\sum_{i=1}^n\frac{1}{2}log(2π\sigma^2)+\frac{1}{2\sigma^2}(y^{(i)}-w^Tx^{(i)}-b)^2
−logP(y∣X)=i=1∑n21log(2πσ2)+2σ21(y(i)−wTx(i)−b)2
现在只需要假设σ是某个固定常数就可以忽略第一项,因为第一项不依赖于w和b。第二项除了常数外,其余部分和前面介绍的均方误差是一样的。
上式的解不依赖于σ,因此,在高斯噪声的假设下,最小化均方误差等价于对线性模型的极大似然估计。
从线性回归到深度网络
神经网络图
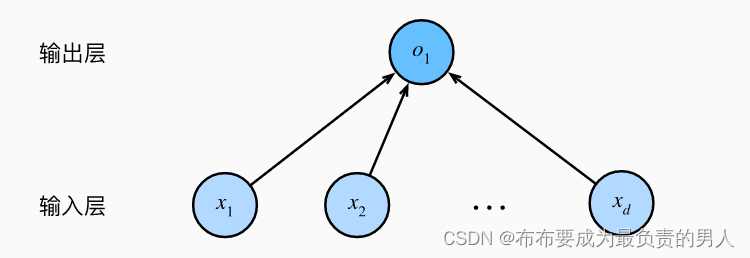
如上图,就是讲线性回归模型描述为了神经网络,容易看出它是单层神经网络,该图只展示了连接模式,略去了权重和偏置。
该图中的特征维度(输入层中的输入数)为d。
对于线性回归,每个输入都与输出相连,成这种变换为全连接层
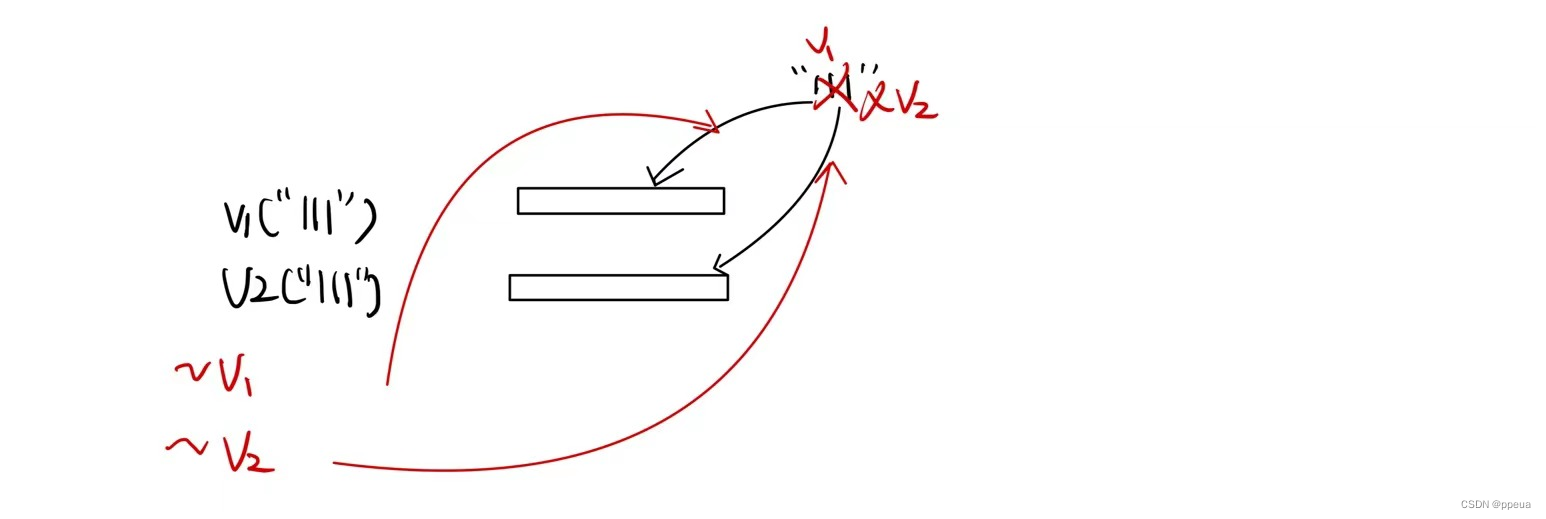
生物学
树突接收来自其他神经元的信息xi,该信息通过突触权重wi来加权,来确定输入的影响(通过xi与wi相乘来激活或抑制)。
来自多个源的加权输入以加权和
y
=
∑
x
i
w
i
+
b
y=\sum x_iw_i+b
y=∑xiwi+b
的形式汇聚在细胞核中,将这些信息发送到轴突y中进一步处理,通常会通过σ(y)进行一些非线性处理。之后要么到达目的地(如肌肉)要么进入另一个神经元。