ceph存储的应用
- 一:创建 CephFS 文件系统 MDS 接口
- 1.服务端操作
- 1)在管理节点创建 mds 服务
- 2)查看各个节点的 mds 服务
- 3)创建存储池,启用 ceph 文件系统
- 4)查看mds状态,一个up,其余两个待命,目前的工作的是node01上的mds服务
- 5)创建用户
- 2.客户端操作
- 1)客户端要在 public 网络内
- 2)在客户端创建工作目录
- 3)在 ceph 的管理节点给客户端拷贝 ceph 的配置文件 ceph.conf 和账号的秘钥环文件 zhangsan.keyring、lisi.keyring
- 4)在客户端安装 ceph 软件包
- 5)在客户端制作秘钥文件
- 6)客户端挂载
- 二:创建 Ceph 块存储系统 RBD 接口
- 1、创建一个名为 rbd-demo 的专门用于 RBD 的存储池
- 2、将存储池转换为 RBD 模式
- 3、初始化存储池
- 4、创建镜像
- 5、镜像管理
- 查看存储池下存在哪些镜像
- 查看镜像的详细信息
- 修改镜像大小
- 删除镜像
- 6、Linux客户端使用
- 修改RBD镜像特性,CentOS7默认情况下只支持layering和striping特性,需要将其它的特性关闭
- 将用户的keyring文件和ceph.conf文件发送到客户端的/etc/ceph目录下
- linux客户端操作
- 7、快照管理
- 在客户端写入文件
- 在管理节点对镜像创建快照
- 列出指定镜像所有快照
- 回滚镜像到指定
- 限制镜像可创建快照数
- 删除快照
- 快照分层
- 快照展平
- 8、镜像的导出导入
- 导出镜像
- 导入镜像
- 三:OSD 故障模拟与恢复
- 1、模拟 OSD 故障
- 2、将坏掉的 osd 踢出集群
- 方法一:
- 方法二:
- 3、把原来坏掉的 osd 修复后重新加入集群
- 如果重启失败
- 四:创建 Ceph 对象存储系统 RGW 接口
- 1、对象存储概念
- 2、创建 RGW 接口
一:创建 CephFS 文件系统 MDS 接口
1.服务端操作
1)在管理节点创建 mds 服务
cd /etc/ceph
ceph-deploy mds create node01 node02 node03
2)查看各个节点的 mds 服务
ssh root@node01 systemctl status ceph-mds@node01
ssh root@node02 systemctl status ceph-mds@node02
ssh root@node03 systemctl status ceph-mds@node03
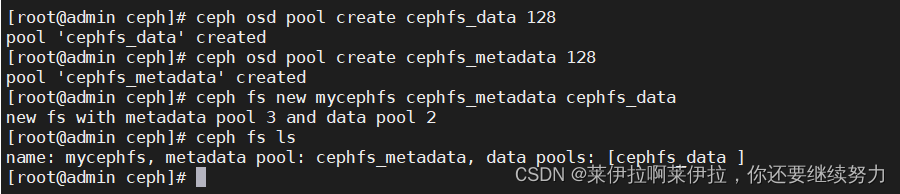
3)创建存储池,启用 ceph 文件系统
ceph 文件系统至少需要两个 rados 池,一个用于存储数据,一个用于存储元数据。此时数据池就类似于文件系统的共享目录。
ceph osd pool create cephfs_data 128
#创建数据Pool
ceph osd pool create cephfs_metadata 128
#创建元数据Pool
#创建 cephfs,命令格式:ceph fs new <FS_NAME> <CEPHFS_METADATA_NAME> <CEPHFS_DATA_NAME>
ceph fs new mycephfs cephfs_metadata cephfs_data
#启用ceph,元数据Pool在前,数据Pool在后
ceph fs ls
#查看cephfs
4)查看mds状态,一个up,其余两个待命,目前的工作的是node01上的mds服务
ceph -s
mds: mycephfs:1 {0=node01=up:active} 2 up:standby
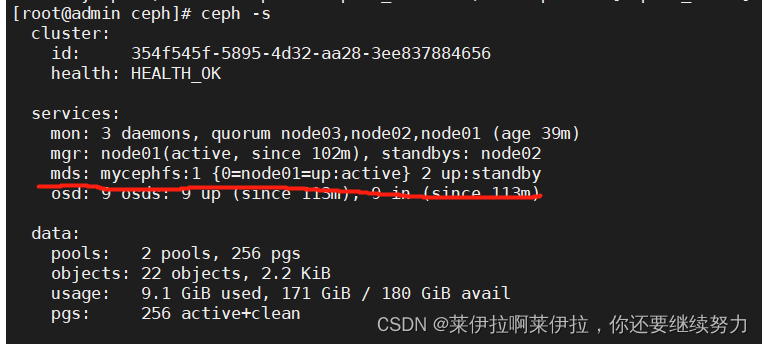
ceph mds stat
mycephfs:1 {0=node01=up:active} 2 up:standby

5)创建用户
语法格式:ceph fs authorize <fs_name> client.<client_id> <path-in-cephfs> rw
#账户为 client.zhangsan,用户 name 为 zhangsan,zhangsan 对ceph文件系统的 / 根目录(注意不是操作系统的根目录)有读写权限
ceph fs authorize mycephfs client.zhangsan / rw | tee /etc/ceph/zhangsan.keyring

#账户为 client.lisi,用户 name 为 lisi,lisi 对文件系统的 / 根目录只有读权限,对文件系统的根目录的子目录 /test 有读写权限
ceph fs authorize mycephfs client.lisi / r /test rw | tee /etc/ceph/lisi.keyring

2.客户端操作
1)客户端要在 public 网络内
2)在客户端创建工作目录
mkdir /etc/ceph
3)在 ceph 的管理节点给客户端拷贝 ceph 的配置文件 ceph.conf 和账号的秘钥环文件 zhangsan.keyring、lisi.keyring
scp ceph.conf zhangsan.keyring lisi.keyring root@client:/etc/ceph
4)在客户端安装 ceph 软件包
cd /opt
wget https://download.ceph.com/rpm-nautilus/el7/noarch/ceph-release-1-1.el7.noarch.rpm --no-check-certificate
rpm -ivh ceph-release-1-1.el7.noarch.rpm
yum install -y ceph
5)在客户端制作秘钥文件
cd /etc/ceph
ceph-authtool -n client.zhangsan -p zhangsan.keyring > zhangsan.key #把 zhangsan 用户的秘钥导出到 zhangsan.keyl
ceph-authtool -n client.lisi -p lisi.keyring > lisi.key #把 lisi 用户的秘钥导出到 lisi.key
6)客户端挂载
●方式一:基于内核
语法格式:
mount -t ceph node01:6789,node02:6789,node03:6789:/ <本地挂载点目录> -o name=<用户名>,secret=<秘钥>
mount -t ceph node01:6789,node02:6789,node03:6789:/ <本地挂载点目录> -o name=<用户名>,secretfile=<秘钥文件>
示例一:
mkdir -p /data/zhangsan
mount -t ceph node01:6789,node02:6789,node03:6789:/ /data/zhangsan -o name=zhangsan,secretfile=/etc/ceph/zhangsan.key
示例二:
mkdir -p /data/lisi
mount -t ceph node01:6789,node02:6789,node03:6789:/ /data/lisi -o name=lisi,secretfile=/etc/ceph/lisi.key
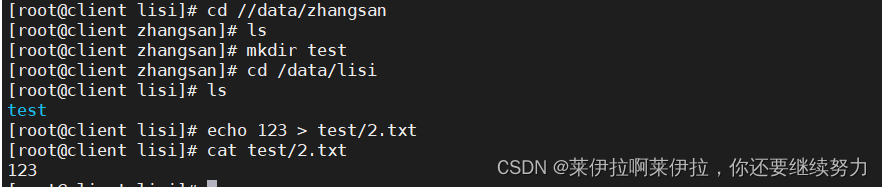
#验证用户权限
cd /data/lisi
echo 123 > 2.txt
-bash:2.txt:权限不够

cd /data/zhangsan
mkdir test
cd /data/lisi
echo 123 > test/2.txt
cat test/2.txt
123
示例三:
#停掉 node02 上的 mds 服务
ssh root@node02 "systemctl stop ceph-mds@node02"
ceph -s
#测试客户端的挂载点仍然是可以用的,如果停掉所有的 mds,客户端就不能用了
●方式二:基于 fuse 工具
1)在 ceph 的管理节点给客户端拷贝 ceph 的配置文件 ceph.conf 和账号的秘钥环文件 zhangsan.keyring、lisi.keyring
scp ceph.client.admin.keyring root@client:/etc/ceph
2)在客户端安装 ceph-fuse
yum install -y ceph-fuse
3)客户端挂载
cd /data/aa
ceph-fuse -m node01:6789,node02:6789,node03:6789 /data/aa [-o nonempty]
#-o nonempty是可选参数,用于避免在挂载目录非空时的报错。如果不加该参数,在挂载非空目录时会提示 "fuse: mountpoint is not empty"。
二:创建 Ceph 块存储系统 RBD 接口
1、创建一个名为 rbd-demo 的专门用于 RBD 的存储池
ceph osd pool create rbd-demo 64 64
2、将存储池转换为 RBD 模式
ceph osd pool application enable rbd-demo rbd
3、初始化存储池
rbd pool init -p rbd-demo # -p 等同于 --pool
4、创建镜像
rbd create -p rbd-demo --image rbd-demo1.img --size 10G
可简写为:
rbd create rbd-demo/rbd-demo2.img --size 10G
5、镜像管理
查看存储池下存在哪些镜像
rbd ls -l -p rbd-demo
查看镜像的详细信息
rbd info -p rbd-demo --image rbd-demo1.img
rbd image ‘rbd-demo.img’:
size 10 GiB in 2560 objects #镜像的大小与被分割成的条带数
order 22 (4 MiB objects) #条带的编号,有效范围是12到25,对应4K到32M,而22代表2的22次方,这样刚好是4M
snapshot_count: 0
id: 5fc98fe1f304 #镜像的ID标识
block_name_prefix: rbd_data.5fc98fe1f304 #名称前缀
format: 2 #使用的镜像格式,默认为2
features: layering, exclusive-lock, object-map, fast-diff, deep-flatten #当前镜像的功能特性
op_features: #可选的功能特性
flags:
修改镜像大小
rbd resize -p rbd-demo --image rbd-demo1.img --size 20G
rbd info -p rbd-demo --image rbd-demo1.img
#使用 resize 调整镜像大小,一般建议只增不减,如果是减少的话需要加选项 --allow-shrink
rbd resize -p rbd-demo --image rbd-demo1.img --size 5G --allow-shrink
删除镜像
#直接删除镜像
rbd rm -p rbd-demo --image rbd-demo2.img
rbd remove rbd-demo/rbd-demo2.img
#推荐使用 trash 命令,这个命令删除是将镜像移动至回收站,如果想找回还可以恢复
rbd trash move rbd-demo/rbd-demo1.img
rbd ls -l -p rbd-demo
rbd trash list -p rbd-demo
5fc98fe1f304 rbd-demo1.img
#还原镜像
rbd trash restore rbd-demo/5fc98fe1f304
rbd ls -l -p rbd-demo
6、Linux客户端使用
客户端使用 RBD 有两种方式:
●通过内核模块KRBD将镜像映射为系统本地块设备,通常设置文件一般为:/dev/rbd*
●另一种是通过librbd接口,通常KVM虚拟机使用这种接口。
本例主要是使用Linux客户端挂载RBD镜像为本地磁盘使用。开始之前需要在所需要客户端节点上面安装ceph-common软件包,因为客户端需要调用rbd命令将RBD镜像映射到本地当作一块普通硬盘使用。并还需要把ceph.conf配置文件和授权keyring文件复制到对应的节点。
//在管理节点创建并授权一个用户可访问指定的 RBD 存储池
#示例,指定用户标识为client.osd-mount,对另对OSD有所有的权限,对Mon有只读的权限
ceph auth get-or-create client.osd-mount osd "allow * pool=rbd-demo" mon "allow r" > /etc/ceph/ceph.client.osd-mount.keyring
修改RBD镜像特性,CentOS7默认情况下只支持layering和striping特性,需要将其它的特性关闭
rbd feature disable rbd-demo/rbd-demo1.img object-map,fast-diff,deep-flatten
将用户的keyring文件和ceph.conf文件发送到客户端的/etc/ceph目录下
cd /etc/ceph
scp ceph.client.osd-mount.keyring ceph.conf root@client:/etc/ceph
linux客户端操作
#安装 ceph-common 软件包
yum install -y ceph-common
#执行客户端映射
cd /etc/ceph
rbd map rbd-demo/rbd-demo1.img --keyring /etc/ceph/ceph.client.osd-mount.keyring --user osd-mount
#查看映射
rbd showmapped
rbd device list
#断开映射
rbd unmap rbd-demo/rbd-demo1.img
#格式化并挂载
mkfs.xfs /dev/rbd0
mkdir -p /data/bb
mount /dev/rbd0 /data/bb
#在线扩容
在管理节点调整镜像的大小
rbd resize rbd-demo/rbd-demo1.img --size 30G
在客户端刷新设备文件
xfs_growfs /dev/rbd0 #刷新xfs文件系统容量
resize2fs /dev/rbd0 #刷新ext4类型文件系统容量
7、快照管理
对 rbd 镜像进行快照,可以保留镜像的状态历史,另外还可以利用快照的分层技术,通过将快照克隆为新的镜像使用。
在客户端写入文件
echo 1111 > /data/bb/11.txt
echo 2222 > /data/bb/22.txt
echo 3333 > /data/bb/33.txt
在管理节点对镜像创建快照
rbd snap create --pool rbd-demo --image rbd-demo1.img --snap demo1_snap1
可简写为:
rbd snap create rbd-demo/rbd-demo1.img@demo1_snap1
列出指定镜像所有快照
rbd snap list rbd-demo/rbd-demo1.img
#用json格式输出:
rbd snap list rbd-demo/rbd-demo1.img --format json --pretty-format
回滚镜像到指定
在回滚快照之前,需要将镜像取消镜像的映射,然后再回滚。
#在客户端操作
rm -rf /data/bb/*
umount /data/bb
rbd unmap rbd-demo/rbd-demo1.img
#在管理节点操作
rbd snap rollback rbd-demo/rbd-demo1.img@demo1_snap1
#在客户端重新映射并挂载
rbd map rbd-demo/rbd-demo1.img --keyring /etc/ceph/ceph.client.osd-mount.keyring --user osd-mount
mount /dev/rbd0 /data/bb
ls /data/bb #发现数据还原回来了
限制镜像可创建快照数
rbd snap limit set rbd-demo/rbd-demo1.img --limit 3
#解除限制:
rbd snap limit clear rbd-demo/rbd-demo1.img
删除快照
#删除指定快照:
rbd snap rm rbd-demo/rbd-demo1.img@demo1_snap1
#删除所有快照:
rbd snap purge rbd-demo/rbd-demo1.img
快照分层
快照分层支持用快照的克隆生成新镜像,这种镜像与直接创建的镜像几乎完全一样,支持镜像的所有操作。唯一不同的是克隆镜像引用了一个只读的上游快照,而且此快照必须要设置保护模式。
#快照克隆
1)将上游快照设置为保护模式:
rbd snap create rbd-demo/rbd-demo1.img@demo1_snap666
rbd snap protect rbd-demo/rbd-demo1.img@demo1_snap666
2)克隆快照为新的镜像
rbd clone rbd-demo/rbd-demo1.img@demo1_snap666 --dest rbd-demo/rbd-demo666.img
rbd ls -p rbd-demo
3)命令查看克隆完成后快照的子镜像
rbd children rbd-demo/rbd-demo1.img@demo1_snap666
快照展平
通常情况下通过快照克隆而得到的镜像会保留对父快照的引用,这时候不可以删除该父快照,否则会有影响。
rbd snap rm rbd-demo/rbd-demo1.img@demo1_snap666
#报错 snapshot ‘demo1_snap666’ is protected from removal.
如果要删除快照但想保留其子镜像,必须先展平其子镜像,展平的时间取决于镜像的大小
1) 展平子镜像
rbd flatten rbd-demo/rbd-demo666.img
2)取消快照保护
rbd snap unprotect rbd-demo/rbd-demo1.img@demo1_snap666
3)删除快照
rbd snap rm rbd-demo/rbd-demo1.img@demo1_snap666
rbd ls -l -p rbd-demo
#在删除掉快照后,查看子镜像依然存在
8、镜像的导出导入
导出镜像
rbd export rbd-demo/rbd-demo1.img /opt/rbd-demo1.img
导入镜像
#卸载客户端挂载,并取消映射
umount /data/bb
rbd unmap rbd-demo/rbd-demo1.img
#清除镜像下的所有快照,并删除镜像
rbd snap purge rbd-demo/rbd-demo1.img
rbd rm rbd-demo/rbd-demo1.img
rbd ls -l -p rbd-demo
#导入镜像
rbd import /opt/rbd-demo1.img rbd-demo/rbd-demo1.img
rbd ls -l -p rbd-demo
三:OSD 故障模拟与恢复
1、模拟 OSD 故障
如果 ceph 集群有上千个 osd,每天坏 2~3 个太正常了,我们可以模拟 down 掉一个 osd
#如果 osd 守护进程正常运行,down 的 osd 会很快自恢复正常,所以需要先关闭守护进程
ssh root@node01 systemctl stop ceph-osd@0
#down 掉 osd
ceph osd down 0
ceph osd tree
2、将坏掉的 osd 踢出集群
方法一:
#将 osd.0 移出集群,集群会开始自动同步数据
ceph osd out osd.0
#将 osd.0 移除 crushmap
ceph osd crush remove osd.0
#删除守护进程对应的账户信息
ceph auth rm osd.0
ceph auth list
#删掉 osd.0
ceph osd rm osd.0
ceph osd stat
ceph -s
方法二:
ceph osd out osd.0
#使用综合步骤,删除配置文件中针对坏掉的 osd 的配置
ceph osd purge osd.0 --yes-i-really-mean-it
3、把原来坏掉的 osd 修复后重新加入集群
#在 osd 节点创建 osd,无需指定名,会按序号自动生成
cd /etc/ceph
ceph osd create
#创建账户
ceph-authtool --create-keyring /etc/ceph/ceph.osd.0.keyring --gen-key -n osd.0 --cap mon 'allow profile osd' --cap mgr 'allow profile osd' --cap osd 'allow *'
#导入新的账户秘钥
ceph auth import -i /etc/ceph/ceph.osd.0.keyring
ceph auth list
#更新对应的 osd 文件夹中的密钥环文件
ceph auth get-or-create osd.0 -o /var/lib/ceph/osd/ceph-0/keyring
#加入 crushmap
ceph osd crush add osd.0 1.000 host=node01 #1.000 代表权重
#加入集群
ceph osd in osd.0
ceph osd tree
#重启 osd 守护进程
systemctl restart ceph-osd@0
ceph osd tree #稍等片刻后 osd 状态为 up
如果重启失败
报错:
Job for ceph-osd@0.service failed because start of the service was
attempted too often. See “systemctl status ceph-osd@0.service” and
“journalctl -xe” for details. To force a start use “systemctl
reset-failed ceph-osd@0.service” followed by “systemctl start
ceph-osd@0.service” again.
#运行
systemctl reset-failed ceph-osd@0.service && systemctl restart ceph-osd@0.service
四:创建 Ceph 对象存储系统 RGW 接口
1、对象存储概念
对象存储(object storage)是非结构数据的存储方法,对象存储中每一条数据都作为单独的对象存储,拥有唯一的地址来识别数据对象,通常用于云计算环境中。
不同于其他数据存储方法,基于对象的存储不使用目录树。
虽然在设计与实现上有所区别,但大多数对象存储系统对外呈现的核心资源类型大同小异。从客户端的角度来看,分为以下几个逻辑单位:
●Amazon S3:
提供了
1、用户(User)
2、存储桶(Bucket)
3、对象(Object)
三者的关系是:
1、User将Object存储到系统上的Bucket
2、存储桶属于某个用户并可以容纳对象,一个存储桶用于存储多个对象
3、同一个用户可以拥有多个存储桶,不同用户允许使用相同名称的Bucket,因此User名称即可做为Bucket的名称空间
●OpenStack Swift:
提供了user、container和object分别对应于用户、存储桶和对象,不过它还额外为user提供了父级组件account,用于表示一个项目或用户,因此一个account中可以包含一到多个user,它们可共享使用同一组container,并为container提供名称空间
●RadosGW:
提供了user、subuser、bucket和object,其中的user对应于S3的user,而subuser则对应于Swift的user,不过user和subuser都不支持为bucket提供名称空间,因此不同用户的存储桶不允许同名;不过,自jewel版本起,RadosGW引入了tenant(租户)用于为user和bucket提供名称空间,但他是个可选组件
从上可以看出大多数对象存储的核心资源类型大同小异,如 Amazon S3、OpenStack Swift 与 RadosGw。其中 S3 与 Swift 互不兼容,RadosGw 为了兼容 S3 与 Swift, Ceph 在 RadosGW 集群的基础上提供了 RGW(RadosGateway)数据抽象层和管理层,它可以原生兼容 S3 和 Swift 的 API。
S3和Swift它们可基于http或https完成数据交换,由RadosGW内建的Civetweb提供服务,它还可以支持代理服务器包括nginx、haproxy等以代理的形式接收用户请求,再转发至RadosGW进程。
RGW 的功能依赖于对象网关守护进程实现,负责向客户端提供 REST API 接口。出于冗余负载均衡的需求,一个 Ceph 集群上通常不止一个 RadosGW 守护进程。
2、创建 RGW 接口
如果需要使用到类似 S3 或者 Swift 接口时候才需要部署/创建 RadosGW 接口,RadosGW 通常作为对象存储(Object Storage)使用,类于阿里云OSS。
//在管理节点创建一个 RGW 守护进程(生产环境下此进程一般需要高可用,后续介绍)
cd /etc/ceph
ceph-deploy rgw create node01
ceph -s
services:
mon: 3 daemons, quorum node01,node02,node03 (age 3h)
mgr: node01(active, since 12h), standbys: node02
mds: mycephfs:1 {0=node02=up:active} 2 up:standby
osd: 6 osds: 6 up (since 12h), 6 in (since 25h)
rgw: 1 daemon active (node01)
#创建成功后默认情况下会自动创建一系列用于 RGW 的存储池
ceph osd pool ls
rgw.root
default.rgw.control #控制器信息
default.rgw.meta #记录元数据
default.rgw.log #日志信息
default.rgw.buckets.index #为 rgw 的 bucket 信息,写入数据后生成
default.rgw.buckets.data #是实际存储的数据信息,写入数据后生成
#默认情况下 RGW 监听 7480 号端口
ssh root@node01 netstat -lntp | grep 7480
curl node01:7480
<?xml version="1.0" encoding="UTF-8"?> anonymous//开启 http+https ,更改监听端口
RadosGW 守护进程内部由 Civetweb 实现,通过对 Civetweb 的配置可以完成对 RadosGW 的基本管理。
#要在 Civetweb 上启用SSL,首先需要一个证书,在 rgw 节点生成证书
1)生成CA证书私钥:
openssl genrsa -out civetweb.key 2048
2)生成CA证书公钥:
openssl req -new -x509 -key civetweb.key -out civetweb.crt -days 3650 -subj “/CN=192.168.80.11”
#3、将生成的证书合并为pem
cat civetweb.key civetweb.crt > /etc/ceph/civetweb.pem
#更改监听端口
Civetweb 默认监听在 7480 端口并提供 http 协议,如果需要修改配置需要在管理节点编辑 ceph.conf 配置文件
cd /etc/ceph
vim ceph.conf
…
[client.rgw.node01]
rgw_host = node01
rgw_frontends = “civetweb port=80+443s ssl_certificate=/etc/ceph/civetweb.pem num_threads=500 request_timeout_ms=60000”
rgw_host:对应的RadosGW名称或者IP地址
rgw_frontends:这里配置监听的端口,是否使用https,以及一些常用配置:
port:如果是https端口,需要在端口后面加一个s。
ssl_certificate:指定证书的路径。
num_threads:最大并发连接数,默认为50,根据需求调整,通常在生产集群环境中此值应该更大
request_timeout_ms:发送与接收超时时长,以ms为单位,默认为30000
access_log_file:访问日志路径,默认为空
error_log_file:错误日志路径,默认为空
#修改完 ceph.conf 配置文件后需要重启对应的 RadosGW 服务,再推送配置文件
ceph-deploy --overwrite-conf config push node0{1…3}
ssh root@node01 systemctl restart ceph-radosgw.target
#在 rgw 节点上查看端口
netstat -lntp | grep -w 80
netstat -lntp | grep 443
#在客户端访问验证
curl http://192.168.80.11:80
curl -k https://192.168.80.11:443
//创建 RadosGW 账户
在管理节点使用 radosgw-admin 命令创建 RadosGW 账户
radosgw-admin user create --uid=“rgwuser” --display-name=“rgw test user”
…
“keys”: [
{
“user”: “rgwuser”,
“access_key”: “ER0SCVRJWNRIKFGQD31H”,
“secret_key”: “YKYjk7L4FfAu8GHeQarIlXodjtj1BXVaxpKv2Nna”
}
],
#创建成功后将输出用户的基本信息,其中最重要的两项信息为 access_key 和 secret_key 。用户创建成后功,如果忘记用户信息可以使用下面的命令查看
radosgw-admin user info --uid=“rgwuser”
//S3 接口访问测试
1)在客户端安装 python3、python3-pip
yum install -y python3 python3-pip
python3 -V
Python 3.6.8
pip3 -V
pip 9.0.3 from /usr/lib/python3.6/site-packages (python 3.6)
2)安装 boto 模块,用于测试连接 S3
pip3 install boto
3)测试访问 S3 接口
echo 123123 > /opt/123.txt
vim test.py
#coding:utf-8
import ssl
import boto.s3.connection
from boto.s3.key import Key
try:
_create_unverified_https_context = ssl._create_unverified_context
except AttributeError:
pass
else:
ssl._create_default_https_context = _create_unverified_https_context
#test用户的keys信息
access_key = “ER0SCVRJWNRIKFGQD31H” #输入 RadosGW 账户的 access_key
secret_key = “YKYjk7L4FfAu8GHeQarIlXodjtj1BXVaxpKv2Nna” #输入 RadosGW 账户的 secret_key
#rgw的ip与端口
host = “192.168.80.11” #输入 RGW 接口的 public 网络地址
#如果使用443端口,下述链接应设置is_secure=True
port = 443
#如果使用80端口,下述链接应设置is_secure=False
#port = 80
conn = boto.connect_s3(
aws_access_key_id=access_key,
aws_secret_access_key=secret_key,
host=host,
port=port,
is_secure=True,
validate_certs=False,
calling_format=boto.s3.connection.OrdinaryCallingFormat()
)
#一:创建存储桶
#conn.create_bucket(bucket_name=‘bucket01’)
#conn.create_bucket(bucket_name=‘bucket02’)
#二:判断是否存在,不存在返回None
exists = conn.lookup(‘bucket01’)
print(exists)
#exists = conn.lookup(‘bucket02’)
#print(exists)
#三:获得一个存储桶
#bucket1 = conn.get_bucket(‘bucket01’)
#bucket2 = conn.get_bucket(‘bucket02’)
#四:查看一个bucket下的文件
#print(list(bucket1.list()))
#print(list(bucket2.list()))
#五:向s3上存储数据,数据来源可以是file、stream、or string
#5.1、上传文件
#bucket1 = conn.get_bucket(‘bucket01’)
#name的值是数据的key
#key = Key(bucket=bucket1, name=‘myfile’)
#key.set_contents_from_filename(‘/opt/123.txt’)
#读取 s3 中文件的内容,返回 string 即文件 123.txt 的内容
#print(key.get_contents_as_string())
#5.2、上传字符串
#如果之前已经获取过对象,此处不需要重复获取
bucket2 = conn.get_bucket(‘bucket02’)
key = Key(bucket=bucket2, name=‘mystr’)
key.set_contents_from_string(‘hello world’)
print(key.get_contents_as_string())
#六:删除一个存储桶,在删除存储桶本身时必须删除该存储桶内的所有key
bucket1 = conn.get_bucket(‘bucket01’)
for key in bucket1:
key.delete()
bucket1.delete()
4)按照以上步骤执行 python 脚本测试
python3 test.py